AI-Search
Posted easonshi
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了AI-Search相关的知识,希望对你有一定的参考价值。
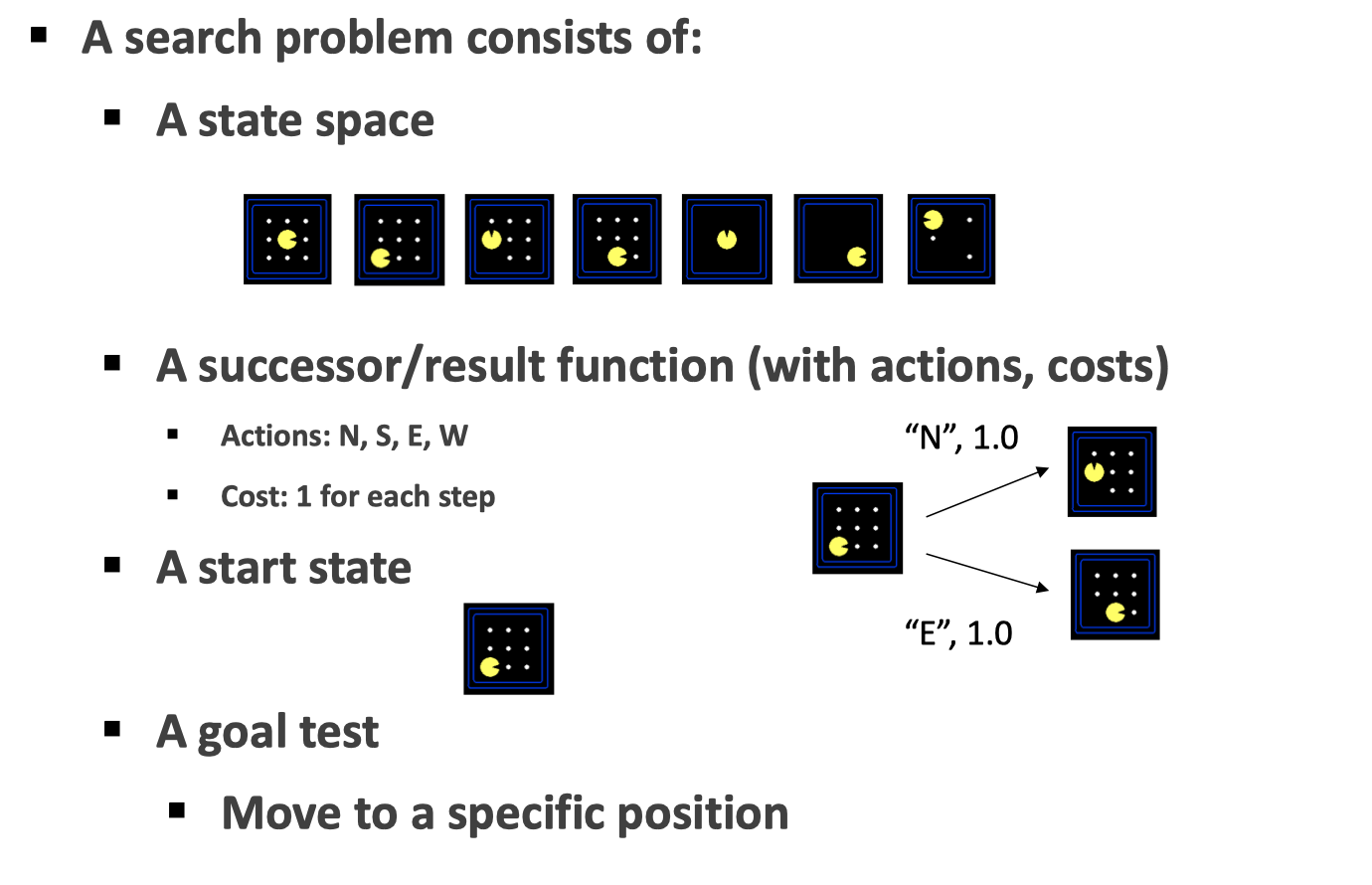
首先,我们定义一个搜索问题:
- a state space
- a successor/result function (with actions, costs)
- a start state
- a goal test
例如对于一个 Pacman 世界来说,状态空间就是 Pacman 所在的位置、豆子的状态所决定的;而后继函数可以包括了我们的动作以及所需要的代价(在这里每一方向上的代价都是 1);我们从一个起始状态去搜索如何到达目标状态。
Note:对于实际的编程来说,最重要的应该是状态的表示,一个好的状态表示可以减少算法复杂度;为此,除了 World State 之外,还可以定义 Local State。
对于一个搜索问题来说,我们可以把不同的状态之间用后继函数连接起来,构成图(state space graph),节点表示状态有向边表示后继函数,注意这里每一个状态都只有一个;然而,在实际的操作中,树(search tree)则更为常见也更容易理解,它和图的区别在于,同一个状态可以对应着搜索树的不同节点,即 state 可重复。
搜索算法可分为无信息和有信息搜索
Uninformed Search
有深度优先(Depth-First Search DFS)、广度优先(Breadth-First Search BFS)、迭代加深(Iterative Deepening IDS)、代价一致(Uniform-Cost Search UCS)等。其思想都是差不多的,只是在实现和性质上面有着些许不同。
对于搜索算法的评价,首先是完备性(complete)和最优性(optimal)。完备性意味着总能找得到解,而最优性则意味着找到的解是否为最好的。当然,考虑到实用性还需要考虑时间、空间复杂度。
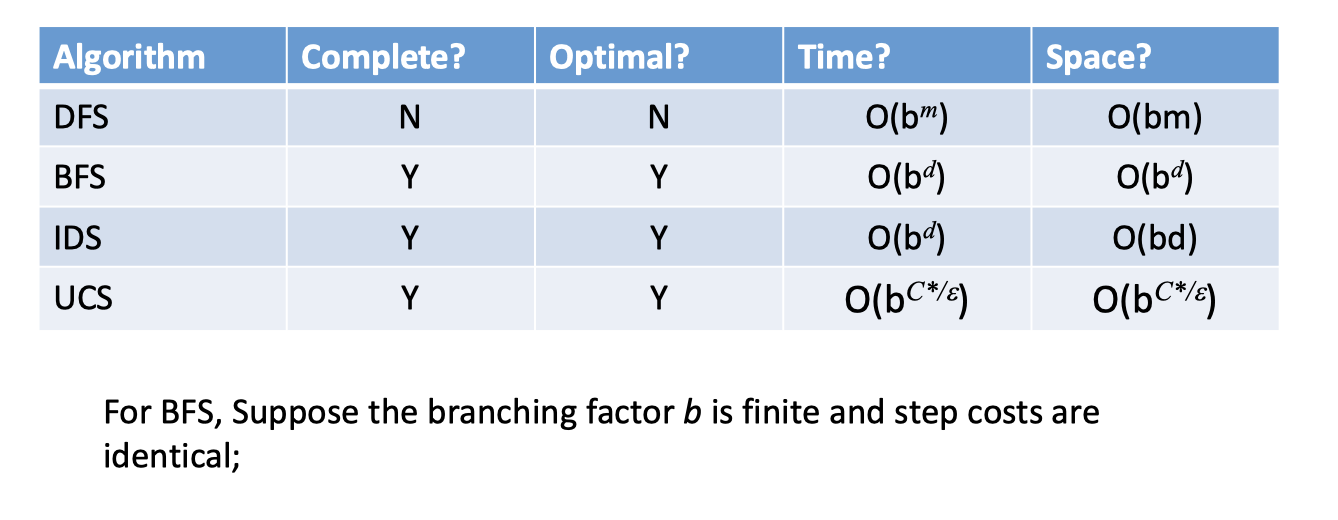
还是从 DFS 和 BFS 讲起吧。可以考虑地图(状态图)上一个点到另一个点的路径。DFS 的思想是:我们一条路走到底,遇到了问题再退回去,找新的路——看起来是一种很任性的方法,但它的好处在于节省了空间,相较于 BFS,它并不需要存储所有已到达的 state,而仅需要存储其所在的路径(对于某一点,在拓展的时候我们可以按照字典序,这样就避免了重复)。这种看似随意的搜索方法当然会有问题:甚至对于一个简单的地图问题来说,其搜索树都可能是 infinte 的,也就是说,它并不是 complete 的(当然也不是 optimal 的。当然,我们可以通过限制搜索深度保障完备性)。BFS的意思是比较直观的:我们一层层、按照距离的远近来需要目标状态,这种方法唯一的问题在于空间复杂度,很多情况下我们并没有那么多的内存在存储庞大的状态空间。具体来说,两者维护的 fringe 是不同的,分别是 LIFO stack 和 FIFO queue(当然,这些都属于术的层面了)。既然 BFS 和 DFS 都有着各自的优缺点,那么IDS就是想把两者的优势结合在一起了:我们保留 DFS 的空间特性,为了保障算法的正确性,我们采取迭代加深的方法,顾名思义即限制搜索的深度,搜索完 d 层之后,若没有找到目标则进一步搜索 d+1 ;妙的是,这几乎没有带了时间上的太多损耗,至少两者在复杂度上是一致的,以理想的搜索树模型来说(每个节点的子节点规模一致),其不过使得时间成本提升了一倍。
前面提到,DFS 和 BFS 在实现的层面上分别使用了stack 和 queue,我们将其统一起来:两者的差别无非在于,我们关注的「优先级」不同,对于前者我们更关心更深的节点,对于后者则赋予更浅的节点以高的优先级。我们用优先队列的概念来说,每次拓展的节点都是「优先级」最高的那一个——事实上,我们之后提到的有信息搜索中,采取的是同样的思路,不过我们对于排序的选择还加上了另外的一些 heuristic。这里的UCS也是一样的:对于 DFS 和 BFS 来说,我们讨论的框架都是在每一个状态之间的 cost 都是一样的情况下,而实际中如地图问题,城市之间的距离(cost)是不同的。我们的思路也是一样,每次把距离最小的那个节点拿出来加以拓展。Note:这时候,在 goal test 上要小心,我们不能检测到目标状态就直接结束算法,而要继续运行以确保该条路径是最优的;也就是说,我们在拓展的时候不进行目标检测,而是将各节点计算好相应的「代价」之后放入优先队列,而是在节点弹出的时候才进行目标检查。
Informed Search
对于 uninformed 来说,we only care about past, but never “look ahead”;然而,事实上我们可以把一些全局的信息利用起来,如 Manhattan distance 或 Euclidean distance 作为 Heuristics Function。
我们先来看一个极端情况(完全不考虑 history)Greedy Search:我们只相信我们的「直觉」(启发函数),每次往我们认为最好那个节点前进。很显然,这样会出问题,想想迷宫就知道了,也就是说,这样无法保障完备性和最优性。A* Search解决了这一问题,其思想是
Take into account the cost of getting to the node as well as our estimation of the cost of getting to the goal from the node.
我们的评价函数 Evaluation function
[
f(n) = g(n) + h(n)
]
其中(g)是我们到节点(n)所花费,而(h)是我们对于该节点到目标节点的启发式估计。
对于启发函数,我们要问的是:什么样的启发函数才能保障最优性?对于 Tree Search 来,我们有结论:
A heuristic (h) is admissible (optimistic) if:
[ 0le h(n)le h^*(n) ag{1} ]
where (h^*(n)) is the true cost to a nearest goal
也就是说,我们启发式的代价要比真实的代价小,即可接受的 admissible。以下简证
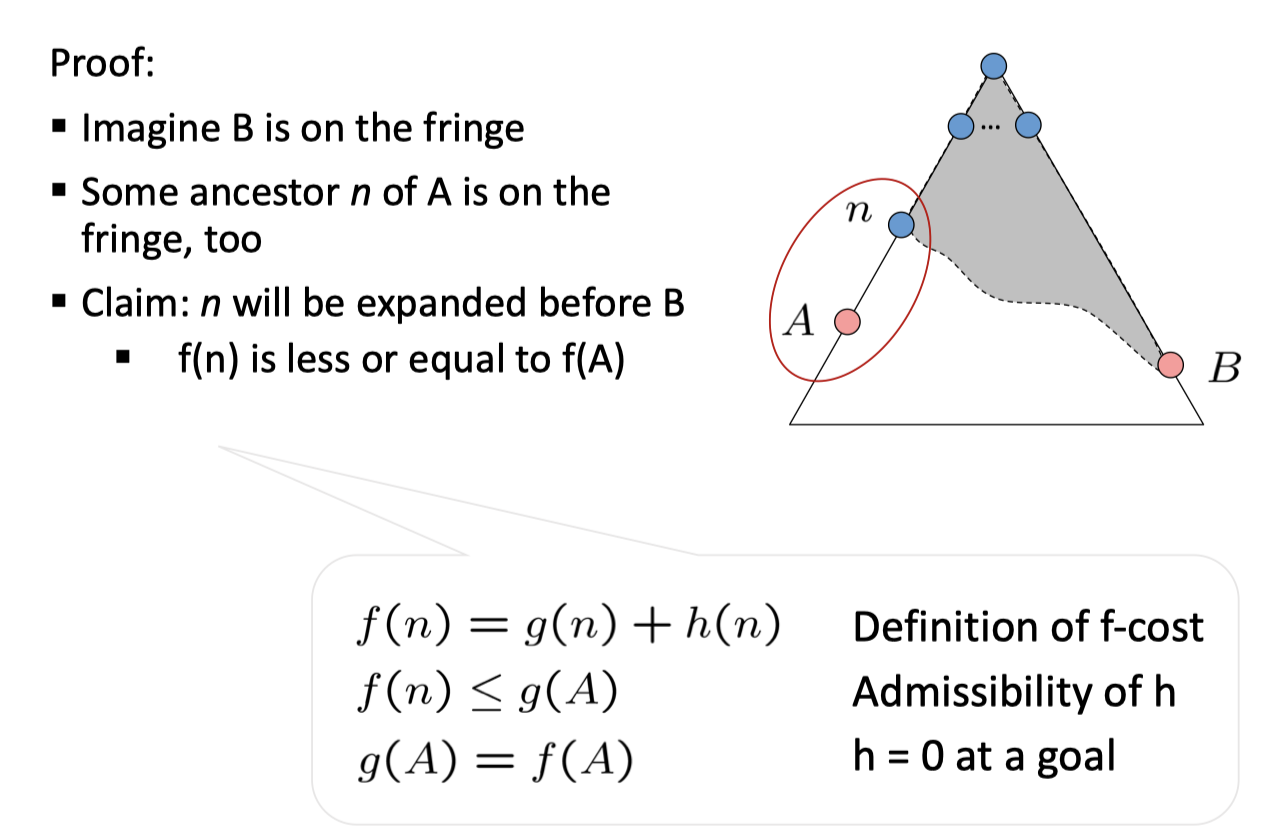
对于一个树上两目标节点 A 和 B,假设 A 为最优的,假如 B 和 A 的一个祖先 n 同在 fringe 中,由于 admissible,(f(n)<g(B)),也就是说 n 会先被弹出……最终 A 和 B 同在 fringe 中,而(h(A)=0),也就是说,我们先找到了 A。
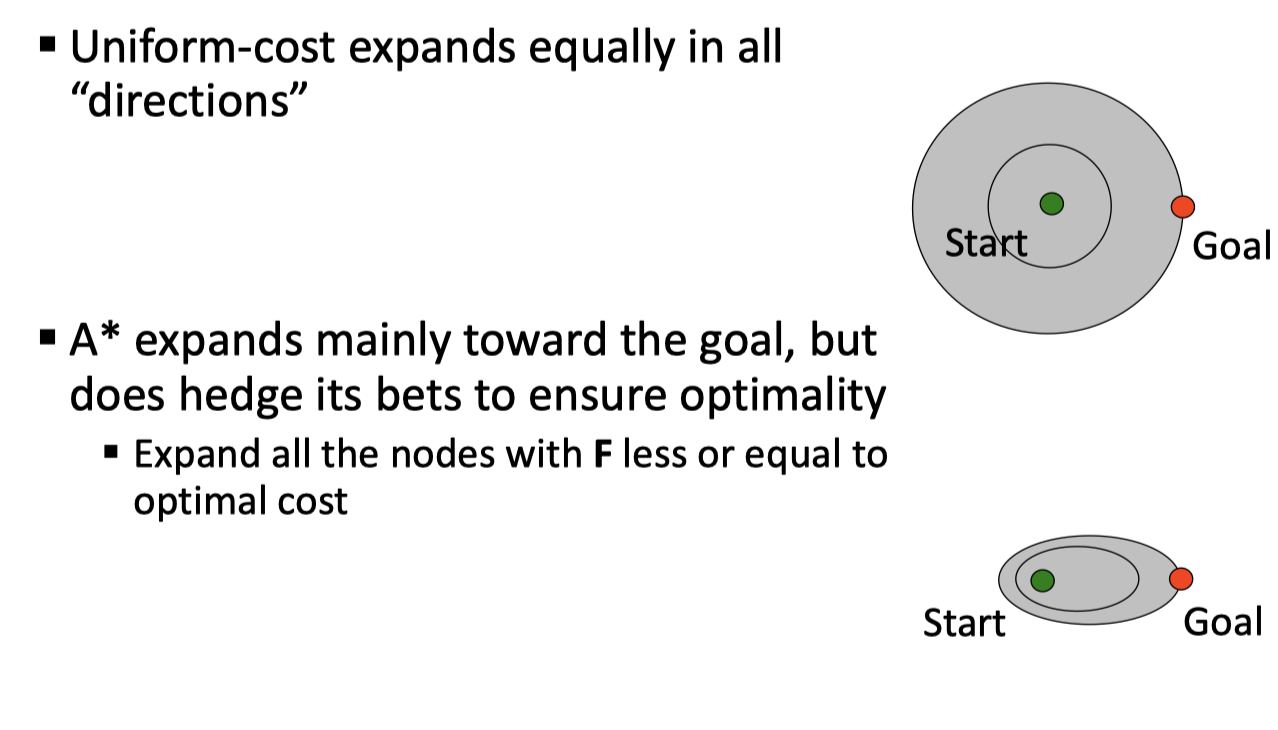
一个图直观地理解启发搜索和 UCS 的区别:
另一个问题,怎样找到启发函数?一门玄学……常见的思路是
- 从 relaxed problem 出发,即忽略某些限制,例如地图问题中,我们采用 Manhattan distance 或 Euclidean distance 都是忽略了墙;对于 8 Puzzle 问题来说有两个限制:不能重叠(只能移动到空的框中),只能走一步(不能「飞」),那么我们就可以任意取消一个限制构成 relaxed problem
- 从 sub-problems 出发,考虑子问题。如 8 Puzzle 问题中,我们只考虑 1-4 号牌,而将 5-8 号牌看成是任意的(注意没把它拿走,仍然构成上面了两个约束,仅仅是要解决的问题变成了原问题的一部分);更直观的理解可以是魔方只复原底层。
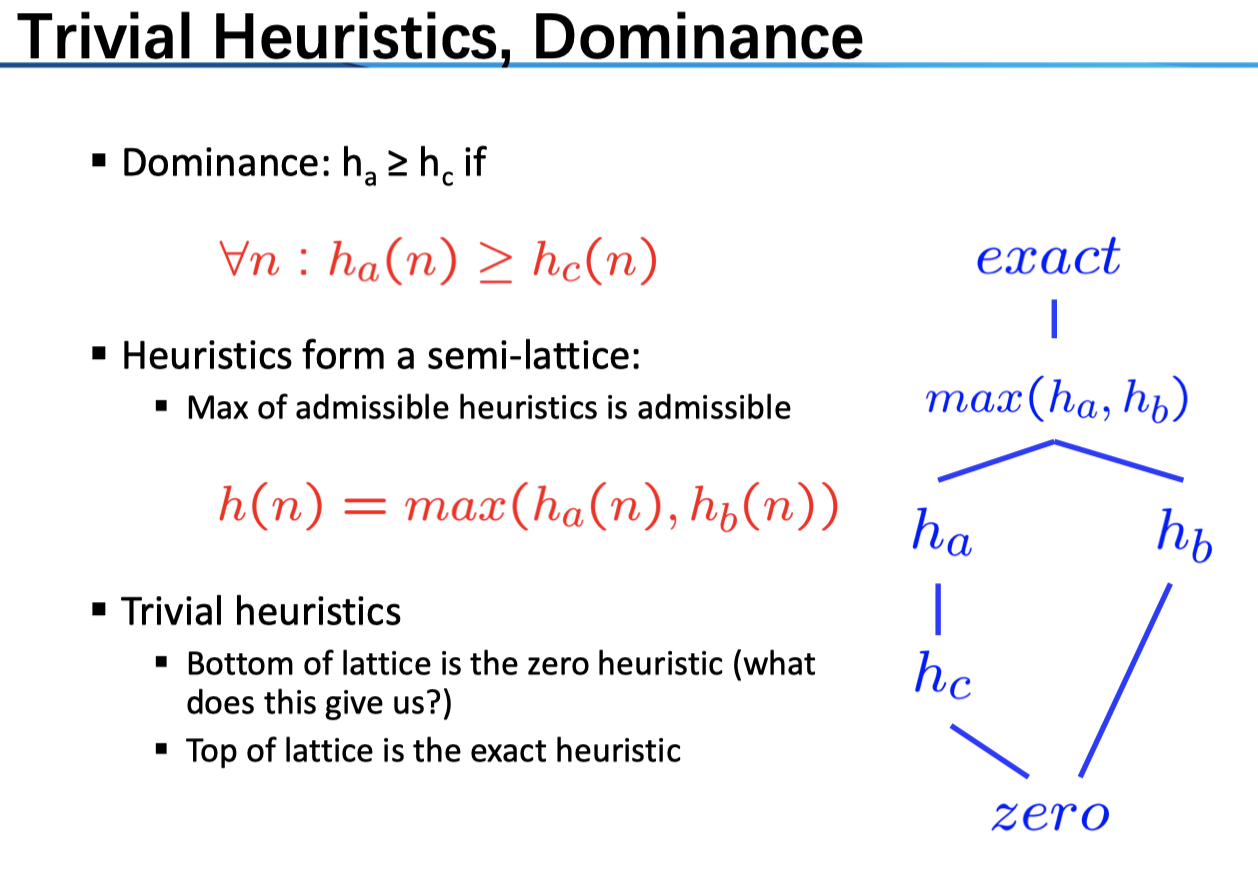
我们可以选取不同的启发函数,一般来说,它和真实值越接近,效果自然越好。一个 trivil 的情况是,全部设为 0(显然是 admissible 的),这样就退化为 UCS 了,而另一个极端,exact 的 heuristic 则可以保障我们不走「弯路」,直接找到了路径。所以,这又是 heuristic 的精确性和计算复杂度之间的 balance。
以上,我们只是讲了 Tree Search 的情况,对于 Graph Search 则更为复杂。后者的 idea 是 never expand a state twice,具体的实现是通过 Tree search + set of expanded states (“closed set”) ;在搜索时,我们为了防止重复,维护了一个集合,在拓展节点之前,我们先检查其是否在已搜索的节点结合之中,若已经搜索过了则跳过。这是一个很棒的想法,减小了计算的成本。然而在这种情况下,单单是 admissible 无法保障最优性。来看一个例子
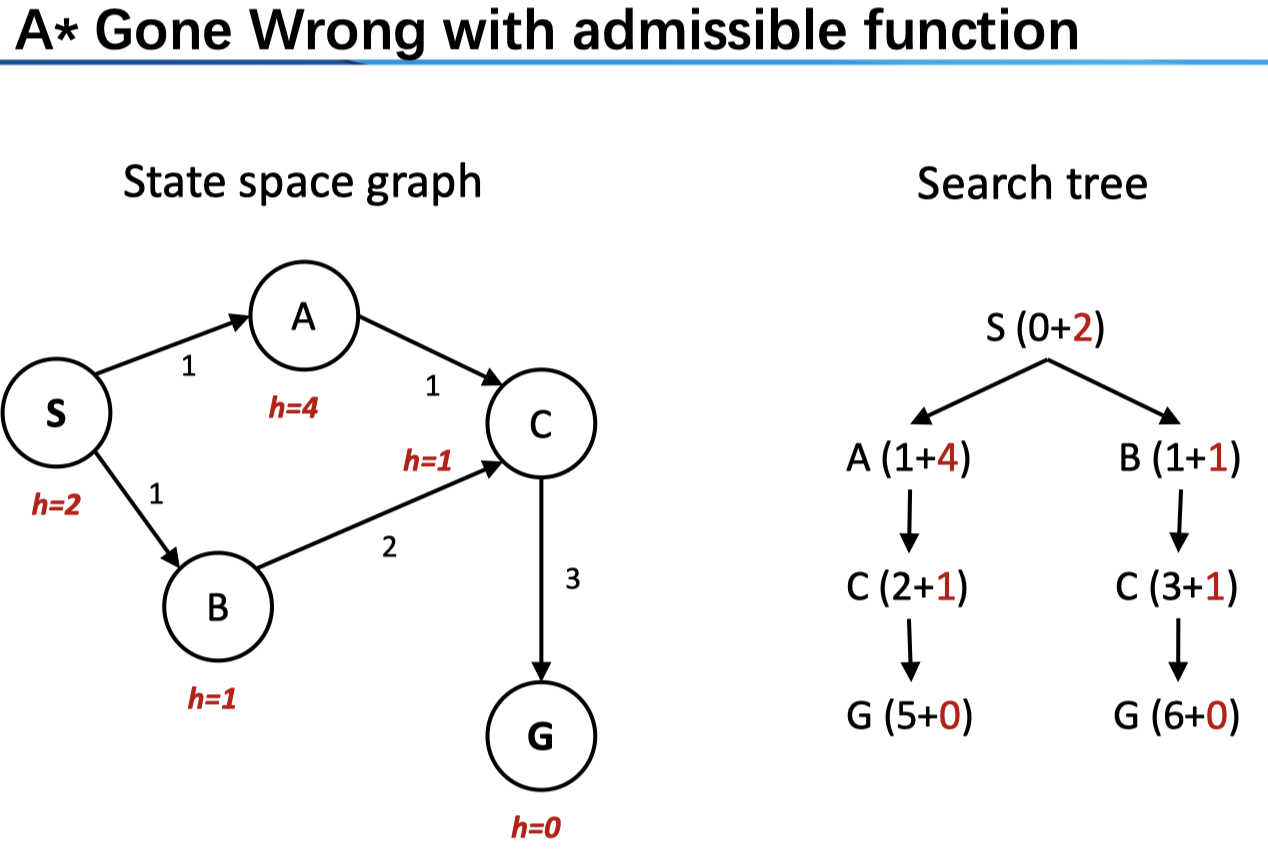
这里的 heuristics 是 admissible 的,然而,我们先从 B 到达 C((f(C)=4<f(A)=5)),而对于 A 进行拓展时(注意它会比 G 先弹出进行拓展),我们不会再拓展 C(其在 closed set 中),这样就造成了非最优的一条路径。
对于图搜索来说,我们要求启发函数一致性 consistency
Consistency: heuristic “arc” cost ≤ actual cost for each arc
[ h(A)-h(C)le cost(A to C) ag{2} ]
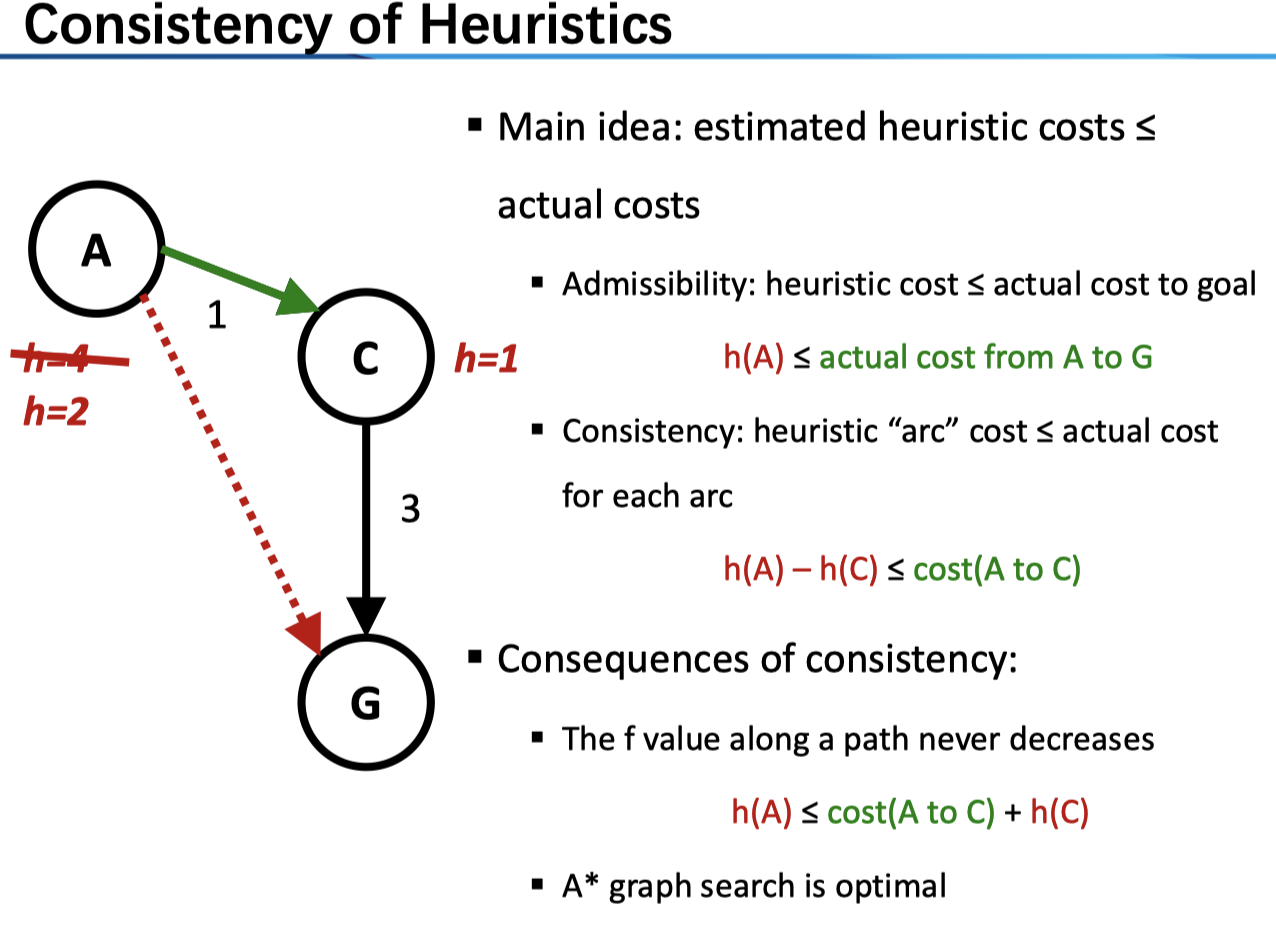
对于(1)式来说,我们仅仅要求任意节点到 goal 的估计是乐观的(admissible);而对于(2)式来说,我们要求,任意一条弧上的估计都是乐观的。上图中,从 A 到 C 的路径出了问题,我们若将 A 的 heuristic 改为 2 即符合了 consistency。
简证:1. 对于树搜索来说(显然图搜索可以表为树搜索,即不去维护 closed set),consistency 事实上保证了,我们每次拓展的节点都是「代价最小的」(因为 consistency 事实上保证了,任意两点之间,若把后者看做是 goal,则其是 admissible 的);2. 这也就是说,对于每一个节点来说,其在进行 fringe 的时候,代价都是最小的,即是最优路径。结论:A* graph search is optimal。
总结一下:
- 对于 Tree search
- A* is optimal if heuristic is admissible
- UCS is a special case (h = 0)
- 对于 Graph search
- A* optimal if heuristic is consistent
- UCS optimal (h = 0 is consistent)
- Consistency implies admissibility
进一步阅读:《计算智能》(一)搜索 讲了另外的一些搜索算法。
以上是关于AI-Search的主要内容,如果未能解决你的问题,请参考以下文章