STM32 IAP固件升级
Posted gulan-zmc
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了STM32 IAP固件升级相关的知识,希望对你有一定的参考价值。
章节说明
STM32 IAP固件升级实验分为以下的章节(加粗的字体是本章节的内容):
一、Flash和RAM的区域划分、工程建立、程序分散加载、程序烧写
二、Stm32 bootloader、application、firmware 程序的分析和编写
三、使用DMA收发串口的不定长数据
四、通信协议的设计
五、STM32 IAP程序的设计
六、上位机的程序的编写
一、前言
前面介绍了IAP需要的一些基础知识,区域怎么划分,还有启动跳转过程等。当然如果需要实现IAP,通讯接口的驱动是不可或缺的。例如可以使用串口(USART)、以太网(ETH)、USB等通讯接口来进行数据收发。本实验就不使用复杂的通讯接口了,使用比较常用又比较简单的串口。当然将串口用好也不是那么简单的,使用串口中断接收数据效率一般比较低。所以为了提高效率,这里使用DMA(直接存储器存取)+USART(串口)接收数据。
注意:下面涉及到串口的基础配置这些就不过多解释了,直接上源码了。如果不会配置的,可以去看看其他大神写的博客,或者去看看一些教学视频。
一、串口配置
STM32F103有三个串口(USART1,USART2,USART3)。在实验中,因为USART1主要用来程序的调试,所以使用USART2来做IAP的通讯接口。
1、USART2的配置程序如下:
a.初始化GPIO
void USART2_GPIO_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
/* 初始化 USART2_TX ----- PA2 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* 初始化 USART2_RX ----- PA3 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
}b.初始化串口
在STM32的串口里支持同步模式和异步模式,我门通常使用的是异步模式;详细的是使用说明参考
《STM32中文参考手册》。
同步模式虽然少用,但是它也是有优点的;在使用多一条同步时钟线的情况下,数据传输会更可靠,更可控。
下面的配置禁止了同步模式,使用的是异步模式(通常使用异步模式USART_ClockInitStructure数据不设置也是可以的)。
void USART2_Config(u32 baudrate)
{
USART_InitTypeDef USART_InitStructure;
USART_ClockInitTypeDef USART_ClockInitStructure;
/* 初始化时钟 */
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2, ENABLE);
/************************使用异步模式,这个不用配置也可以*****************************/
/* 关闭同步时钟(即关闭串口的同步模式; 需要使用同步模式,则使能这个) */
USART_ClockInitStructure.USART_Clock = USART_Clock_Disable;
/* 配置时钟稳态值为低电平(即空闲时,时钟线的电平为低电平) */
USART_ClockInitStructure.USART_CPOL = USART_CPOL_Low;
/* 配置时钟相位,在时钟的第二个边沿进行数据捕获 */
USART_ClockInitStructure.USART_CPHA = USART_CPHA_2Edge;
/* 最后一个数据位不从时钟线上输出 */
USART_ClockInitStructure.USART_LastBit = USART_LastBit_Disable;
/* 初始化 USART2 的同步参数,这里没有使用同步时钟 */
USART_ClockInit(USART2, &USART_ClockInitStructure);
/************************使用异步模式,这个不用配置也可以*****************************/
/* 设置波特率 */
USART_InitStructure.USART_BaudRate = baudrate;
/* 设置数据位长度为 8 */
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
/* 设置停止位是1 */
USART_InitStructure.USART_StopBits = USART_StopBits_1;
/* 不适用奇偶校验 */
USART_InitStructure.USART_Parity = USART_Parity_No ;
/* 关闭硬件流控 */
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
/* 使能 USART2 接收和接收 */
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
/* 初始化 USART2 的异步参数,在STM32中通常使用这种传输方式 */
USART_Init(USART2, &USART_InitStructure);
}STM32F103 DMA
1、STM32F103 DMA简单介绍
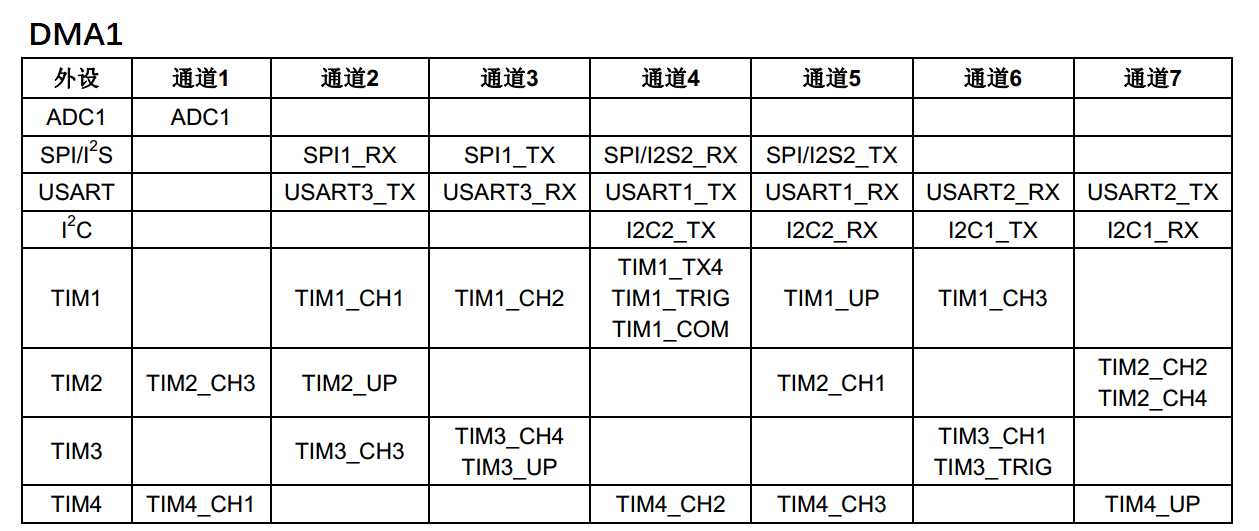
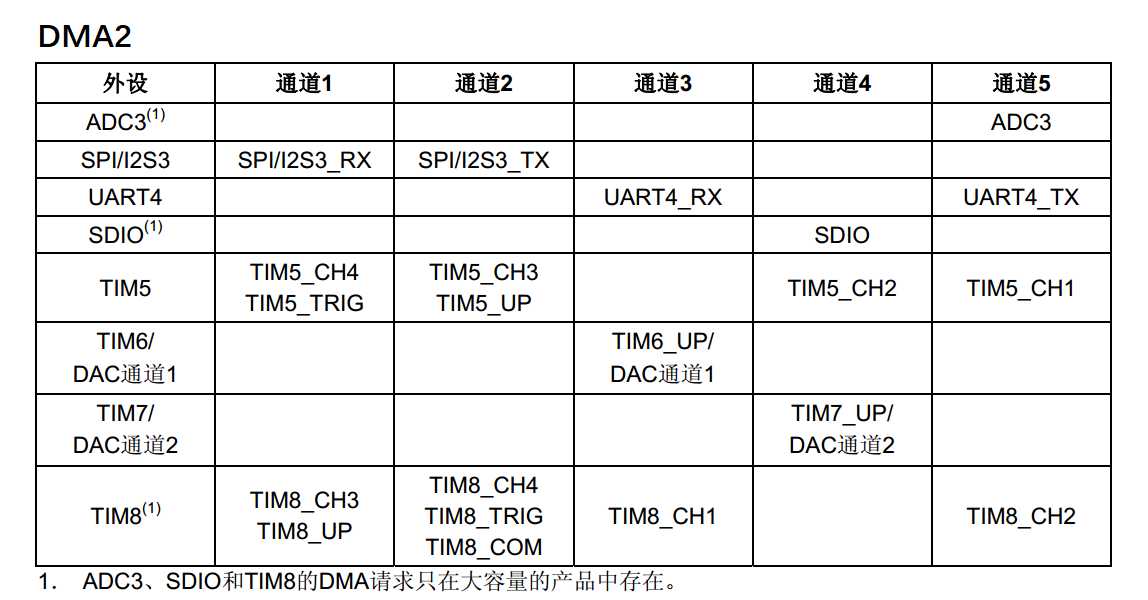
在STM32里面有两个DMA控制器(DMA1和DMA2)。两个DMA控制器有一共有12个通道(DMA1 7个通道,DMA2 5个通道)。每个DMA通道对应的外设备如下图:
对于详细的DMA介绍参考《STM32中文参考手册》,这里就不过多介绍了。
2、DMA 使用方法
DMA的使用并不复杂,通道配置过程如下:
- 设置外设起始地址
- 设置内存的起始地址
- 设置数据传输的长度(要传输多长的数据)
- 设置数据位宽
- 设置数据的传输方向
- 设置传输模式
- 设置通道的优先级
- 使能DMA通道
3、配置 USART2 的 DMA
从上面的两张外设对应DMA通道的图片知到:
USART2_RX对应DMA1的通道6,USART2_TX对应DMA1的通道7。
a. 配置USART2_RX的DMA
这里只写简单的配置过程。DMA的更详细的使用说明,请参考
《STM32中文参考手册》。配置程序如下:
void USART2_DMA_RX_Config(u8* Buffer, s32 NumData)
{
DMA_InitTypeDef DMA_InitStructure;
/* 使能时钟 */
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1, ENABLE);
/* 将 DMA1_Channel6 设置为缺省 */
DMA_DeInit(DMA1_Channel6);
/* 配置外设的地址为串口的就收寄存器的地址 */
DMA_InitStructure.DMA_PeripheralBaseAddr = (uint32_t)(&(USART2->DR));
/* 设置内存的地址 */
DMA_InitStructure.DMA_MemoryBaseAddr = (uint32_t)(Buffer);
/* 设置传输方向为 外设到内存 */
DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralSRC;
/* 设置缓冲区Buffer的大小 */
DMA_InitStructure.DMA_BufferSize = NumData;
/* 禁止外设的的地址自增 */
DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable;
/* 使能内存地址自增 */
DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable;
/* 设置外设每次传输数据的大小为字节(Byte) */
DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_Byte;
/* 设置内存每次传输数据的大小为字节(Byte) */
DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_Byte;
/* 将设置DMA传输的模式为循环传输 */
DMA_InitStructure.DMA_Mode = DMA_Mode_Circular;
/* 设置当前DMA通道的优先级为高优先级 */
DMA_InitStructure.DMA_Priority = DMA_Priority_High;
/* 禁止内存到内存传输 */
DMA_InitStructure.DMA_M2M = DMA_M2M_Disable;
/* 初始化DMA1通道6 */
DMA_Init(DMA1_Channel6, &DMA_InitStructure);
}b. 配置USART2_TX的DMA
void USART2_DMA_TX_Config(u8* Buffer, s32 NumData)
{
DMA_InitTypeDef DMA_InitStructure;
/* 使能时钟 */
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1, ENABLE);
/* 将 DMA1_Channel7 设置为缺省 */
DMA_DeInit(DMA1_Channel7);
/* 配置外设的地址为串口的发送数据寄存器的地址 */
DMA_InitStructure.DMA_PeripheralBaseAddr = (uint32_t)(&(USART2->DR));
/* 设置内存的地址 */
DMA_InitStructure.DMA_MemoryBaseAddr = (uint32_t)(Buffer);
/* 设置传输方向为 内存到外设 */
DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralDST;
/* 设置缓冲区Buffer的大小 */
DMA_InitStructure.DMA_BufferSize = NumData;
/* 禁止外设的的地址自增 */
DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable;
/* 使能内存地址自增 */
DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable;
/* 设置外设每次传输数据的大小为字节(Byte) */
DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_Byte;
/* 设置内存每次传输数据的大小为字节(Byte) */
DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_Byte;
/* 将设置DMA传输的模式为正常传输 */
DMA_InitStructure.DMA_Mode = DMA_Mode_Normal;
/* 设置当前DMA通道的优先级为高优先级 */
DMA_InitStructure.DMA_Priority = DMA_Priority_High;
/* 禁止内存到内存传输 */
DMA_InitStructure.DMA_M2M = DMA_M2M_Disable;
/* 初始化DMA1通道7 */
DMA_Init(DMA1_Channel7, &DMA_InitStructure);
}三、初始化、使能串口和DMA
1、使能串口和DMA
使能串口和DMA的函数如下:
void USART2_Enable(void)
{
/* 使能串口2 */
USART_Cmd(USART2, ENABLE);
/* 使能串口2的DMA发送 */
USART_DMACmd(USART2, USART_DMAReq_Tx, ENABLE);
/* 使能串口2的DMA接收 */
USART_DMACmd(USART2, USART_DMAReq_Rx, ENABLE);
/* 使能DMA1通道7 */
DMA_Cmd(DMA1_Channel7, ENABLE);
/* 使能DMA1通道6 */
DMA_Cmd(DMA1_Channel6, ENABLE);
}2、初始化函数
USART2_DMA_TxBuff和USART2_DMA_RxBuff是一个全局数组,用于DMA发送或者接收数据;以后需要发送数据和接收数据就操作这两个数组(buffer)就可以了
void USART2_Init(u32 baudrate)
{
/* 初始化USART2的GPIO */
USART2_GPIO_Config();
/* 设置串口 */
USART2_Config(baudrate);
/* 设置USART2的发送DMA */
USART2_DMA_TX_Config(USART2_DMA_TxBuff, 0);
/* 设置USART2的接收DMA */
USART2_DMA_RX_Config(USART2_DMA_RxBuff, USART2_DMA_RXBUFFLEN);
/* 使能 */
USART2_Enable();
}*** 配置到这里,基本就可以使用DMA接收和发送数据了;使用DMA发送数据是比较简单的,但是使用DMA接收数据,需要费一点点功夫。 ***
四、DMA接收串口数据
1、处理接收到的数据
由于使用了DMA接收数据,所以不需要再操作
USART2的DR寄存器了(数据寄存器);硬件会直接将数据copy到USART2_DMA_RxBuff数组里面。又因为在接收的DMA设置函数里将DMA的模式配置成了循环模式,所以USART2_DMA_RxBuff的本质是一个环形缓冲区。
接下来就先上程序再慢慢分析吧。接收处理的代码如下:
/* 说明一下。函数里的 USART2_Service 是一个全局的函数指针,用于处理接收到的数据的 (需要怎么处理,就看业务的需求是什么了) */
/* USART2_Service 函数指针定义如下: void (*USART2_Service)(u8 *buff, u16 len); */
/* 用户需要自己初始化这个函数指针 */
/* 可以将 USART2_Service 设置为一个回调函数的样式;在这里就使用全局的函数指针了 */
void USART2_DMA_Rx(void)
{
u32 pos;
/* USART2_RX_Pos 指向环形缓冲区数据的头部 */
static volatile u16 USART2_RX_Pos;
/* DMA1_Channel6 -> CNDTR 接收到的数据查长度 */
/* 算出pos当前的指向,缓冲区数据的尾部 */
pos = USART2_DMA_RXBUFFLEN - (DMA1_Channel6 -> CNDTR);
/* 当前的pos上一次的pos大 */
if(pos > USART2_RX_Pos)
{
/* 算个出buff的起始地址,算出接收到数据的长度 */
USART2_Service(USART2_DMA_RxBuff + USART2_RX_Pos, pos - USART2_RX_Pos);
/* 改变buffer的起始指向 */
USART2_RX_Pos = pos;
}
/* 如果上一次的pos比当前的pos大,说明有部分数据在前面 */
else if(pos < USART2_RX_Pos)
{
/* 计算buffer的起始地址,先将后面部分的数据放入到内存管理 */
USART2_Service(USART2_DMA_RxBuff + USART2_RX_Pos, USART2_DMA_RXBUFFLEN - USART2_RX_Pos);
if(pos != 0)
{
/* 如果头部还有数据,也将头部前面的数据放入内存管理 */
USART2_Service(USART2_DMA_RxBuff, pos);
}
/* 改变头部的起始指向 */
USART2_RX_Pos = pos;
}
else
{;}
}*** 下面具体分析 USART2_DMA_Rx函数的原理 ***
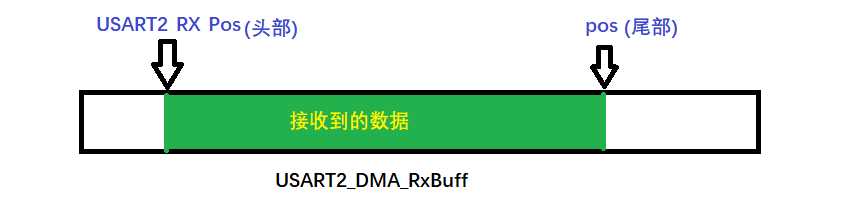
2、代码块1的分析
/* 当前的pos上一次的pos大 */
if(pos > USART2_RX_Pos)
{
/* 算个出buff的起始地址,算出接收到数据的长度 */
USART2_Service(USART2_DMA_RxBuff + USART2_RX_Pos, pos - USART2_RX_Pos);
/* 改变buffer的起始指向 */
USART2_RX_Pos = pos;
}这部分代码是处理接收到的数据是下面的情况(也就是需要处理绿色区的数据)
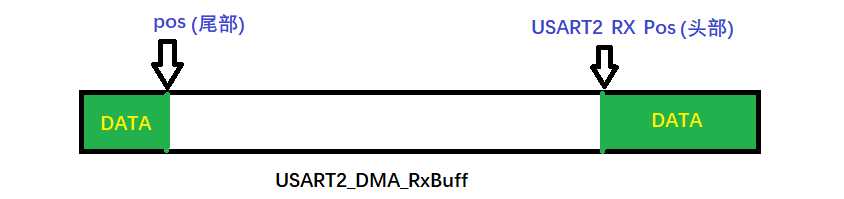
3、代码块2的分析
/* 如果上一次的pos比当前的pos大,说明有部分数据在前面 */
else if(pos < USART2_RX_Pos)
{
/* 计算buffer的起始地址,先将后面部分的数据放入到内存管理 */
USART2_Service(USART2_DMA_RxBuff + USART2_RX_Pos, USART2_DMA_RXBUFFLEN - USART2_RX_Pos);
if(pos != 0)
{
/* 如果头部还有数据,也将头部前面的数据放入内存管理 */
USART2_Service(USART2_DMA_RxBuff, pos);
}
/* 改变头部的起始指向 */
USART2_RX_Pos = pos;
}这部分代码是处理接收到的数据是下面的情况(也就是需要处理绿色区的数据)
五、总结
总结一下使用方法:
- 调用
USART2_Init函数初始化串口和DMA- 初始化
USART2_Service函数指针;这个函数的参数有两个,一个是数据的指针,一个是接收到数据的长度- 通过大循环不断调用
USART2_DMA_Rx函数处理接收到的数据;
注意:
使用这个方法接收串口的数据有优点也有缺点
- 优点是:效率比较高,使用比较方便
- 缺点是:实时性的要求比较高。如果缓冲区比较小,实时性又比较低;当有大量数据连续传来时,很容易就会造成数据的覆盖。在单线程里面使用时,尽量少使用大的延时函数。
串口的发送就不罗嗦了,网上比较多的教程(当然想要发送的效率更高可以使用双缓冲的方式,具体怎么设计就留给各位小伙伴门自己发挥了)。工程代码还没整理出来,有空整理一下上传到码云上。(先偷个懒hhh...)
以上是关于STM32 IAP固件升级的主要内容,如果未能解决你的问题,请参考以下文章