激光点云处理--聚类(Clustering)
Posted xuhongfei0021
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了激光点云处理--聚类(Clustering)相关的知识,希望对你有一定的参考价值。
问题:已经分割出地面,如何在剩余的点云中对不同的障碍物点云进行聚类?
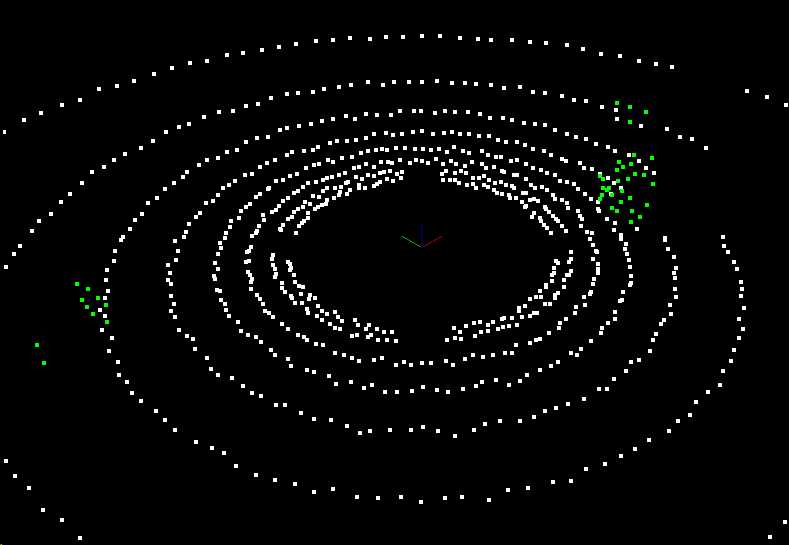
方法: 欧式聚类(Euclidean Clustering)
步骤:
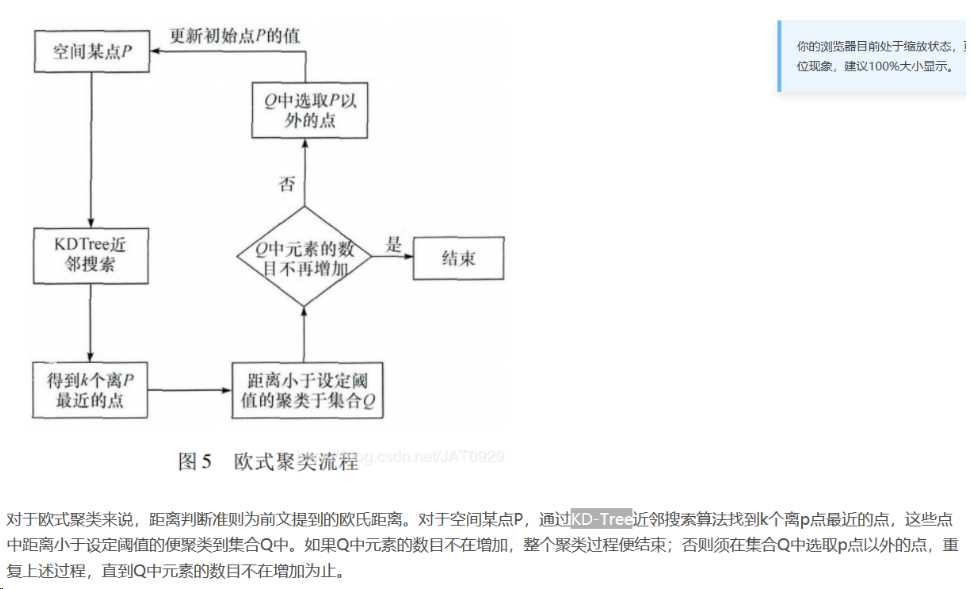
注:上流程中,使用KD-Tree来加速寻找nearest point
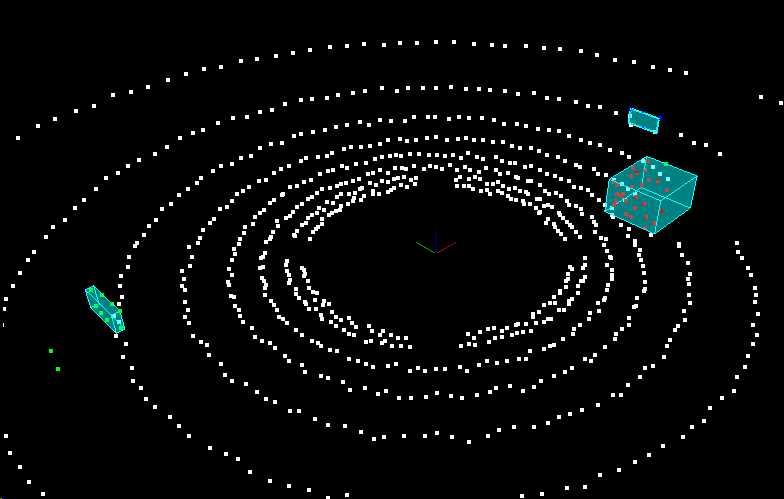
聚类结果(添加 bounding box):
代码:
//enviroment.cpp //cluster std::vector<pcl::PointCloud<pcl::PointXYZ>::Ptr> my_cluster_vector; my_cluster_vector=my_processor->Clustering(seg_cloud_pair.second,1,3,30); std::vector<Color> Colors = {Color(255,0,0),Color(0,255,0),Color(0,0,255)}; int clusterid = 0; for(pcl::PointCloud<pcl::PointXYZ>::Ptr cluster: my_cluster_vector){ std::cout<<"size of cluster"+std::to_string(clusterid)<<":"; my_processor->numPoints(cluster); renderPointCloud(viewer, cluster, "obcluster"+std::to_string(clusterid), Colors[clusterid % Colors.size()]); Box box = my_processor->BoundingBox(cluster); renderBox(viewer,box,clusterid,Color(0,20,20)); clusterid++; }
//ProcressPointClouds.cpp template<typename PointT> std::vector<typename pcl::PointCloud<PointT>::Ptr> ProcessPointClouds<PointT>::Clustering(typename pcl::PointCloud<PointT>::Ptr cloud, float clusterTolerance, int minSize, int maxSize) { // Time clustering process auto startTime = std::chrono::steady_clock::now(); std::vector<typename pcl::PointCloud<PointT>::Ptr> clusters; // TODO:: Fill in the function to perform euclidean clustering to group detected obstacles typename pcl::search::KdTree<PointT>::Ptr tree (new pcl::search::KdTree<PointT>); tree->setInputCloud (cloud); std::vector<pcl::PointIndices> cluster_indices; pcl::EuclideanClusterExtraction<PointT> ec; ec.setClusterTolerance (clusterTolerance); // 2cm ec.setMinClusterSize (minSize); ec.setMaxClusterSize (maxSize); ec.setSearchMethod (tree); ec.setInputCloud (cloud); ec.extract (cluster_indices); for(auto x:cluster_indices) { typename pcl::PointCloud<PointT>::Ptr cloud_temp(new pcl::PointCloud<PointT>); for(auto p:x.indices) { cloud_temp->points.push_back(cloud->points[p]); } clusters.push_back(cloud_temp); } auto endTime = std::chrono::steady_clock::now(); auto elapsedTime = std::chrono::duration_cast<std::chrono::milliseconds>(endTime - startTime); std::cout << "clustering took " << elapsedTime.count() << " milliseconds and found " << clusters.size() << " clusters" << std::endl; return clusters; }
以上是关于激光点云处理--聚类(Clustering)的主要内容,如果未能解决你的问题,请参考以下文章