《模拟系统设计方法设计计算机控制系统》总结
Posted beta-1999
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了《模拟系统设计方法设计计算机控制系统》总结相关的知识,希望对你有一定的参考价值。
一、一般的设计步骤
(1)在连续系统控制器与被控对象之间插入保持器,比如零阶保持器ZOH,检查插入后的连续系统是否稳定,如不稳定,则重新设计控制器D(s)
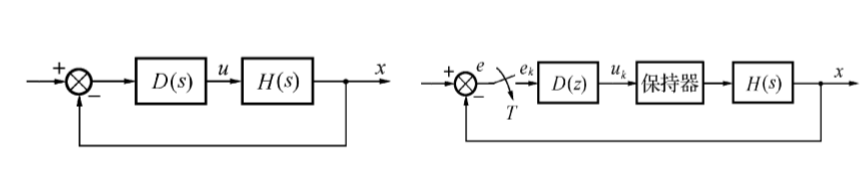
(2)选择合适的方法将D(s)离散化为D(z)
(3)对G(s) = ZOH*H(s)离散化,D(s)和G(z)共同构成离散系统。此时检查离散系统的特性是否满足要求,如不满足就重新设计D(s)
(4)用数字算法(编程)实现控制器D(z),即用差分方程表示D(z)
二、如何离散化D(s)为D(z)
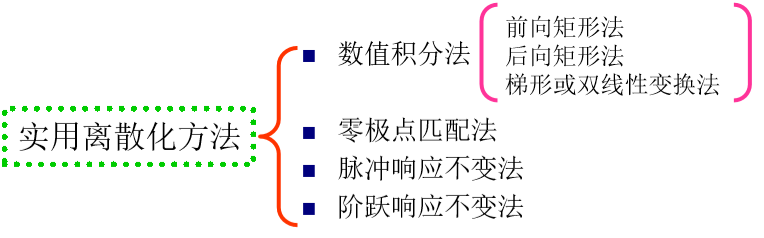
(1)数值积分法
- 基本思想 -

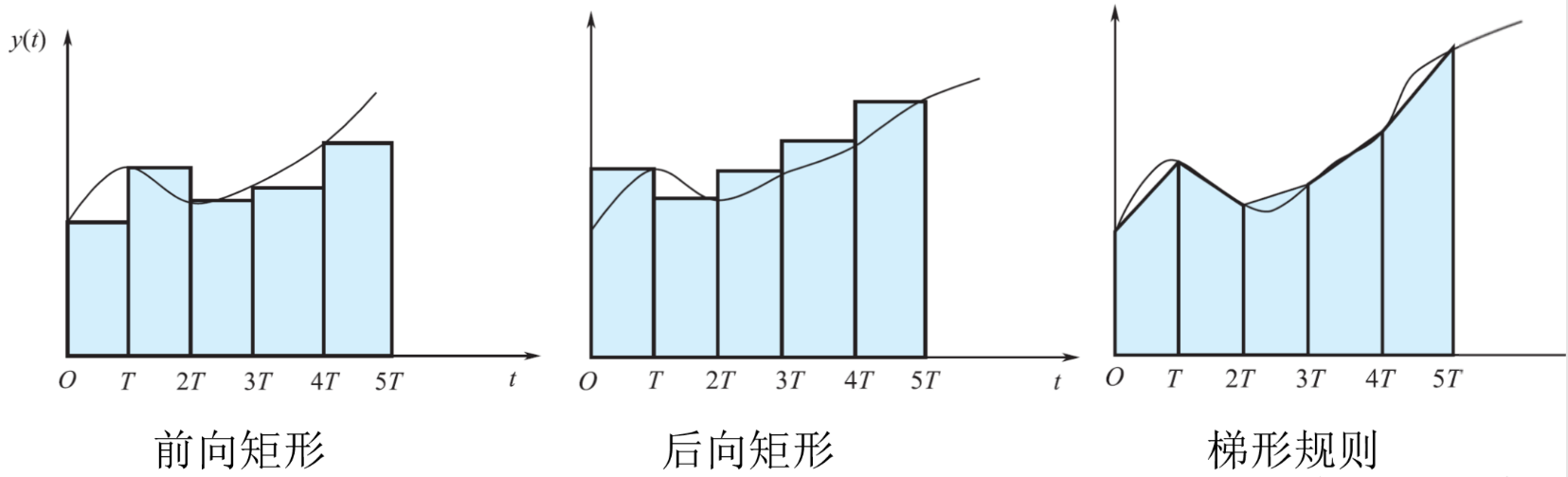
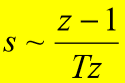
A、前向矩形法
??主要特性
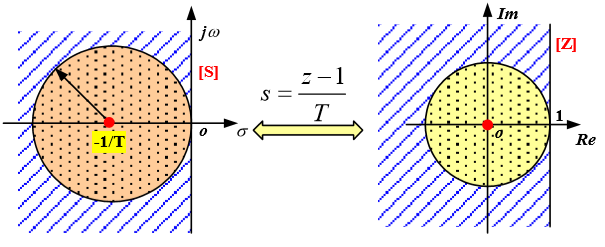
- 【i】s域和z域为平移伸缩关系
??由于 z = 1 + Ts,想当于将s域伸缩T倍,再向左平移1个单位长度; 【ii】不能保证z域的稳定性
??上述映射关系带来的问题是即使D(s)在s域稳定(极点全位于s左半平面),D(z)在z域也不一定能稳定(极点位于单位圆内):
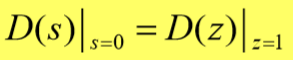
【iii】变换前后,稳态增益不变,即:
??改进方法: 减小采样周期T (why?)
B、后向矩形法
??主要特性
- 【i】s域左半平面映射为z域的小圆 |z-1/2|2 = 1 内部
- 【ii】 s域虚轴映射为z域的小圆 |z-1/2|2 = 1 圆上
【iii】 s域右半平面映射为z域的小圆 |z-1/2|2 = 1 外部
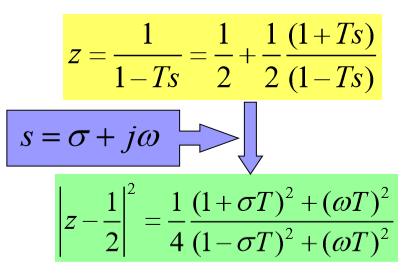
- 【iv】由上述三点,可知D(s)稳定,则D(z)一定稳定
【v】变换前后,稳态增益不变,即:
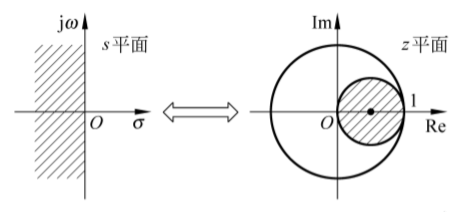
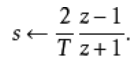
C、梯形法(双线性变换法)

- 【v】 由离散后的控制器相较于连续控制器有较大畸变 (why?)
??主要特性
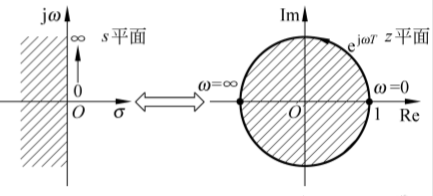
- 【i】s域左半平面映射为z域的单位圆内部
- 【ii】s域虚轴映射为z域的单位圆上
【iii】s域右半平面映射为z域的单位圆外部
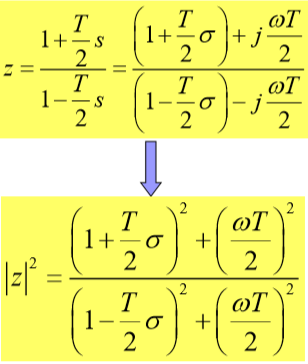
- 【iv】由上述三点,可知D(s)稳定,则D(z)一定稳定
【v】变换前后,稳态增益不变,即:
- 【vi】 变换后D(z)的分子分母同阶,即引入了零点
【vii】频率畸变:
??在这之前,先讲解一下双线性变换的原理:
????【1】先将s平面压缩到(-jπ/T,jπ/T)的子带区域,记作s1平面,其压缩公式为:
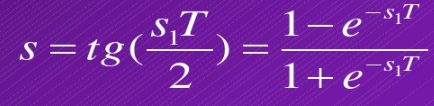
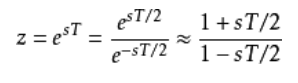
???? 【2】再将该子带映射通过z = esT映射到z平面,并乘上系数T/2,得
????注意到数字信号处理中,模拟频率常用Ω表示,数字频率常用w表示,令s = jΩ,z = ejw,代入上式:

????乘上系数T/2(这一点我也没想明白 ),得到双线性变化时模拟系统与数字系统之间的频率的转换公式:
????由下图可以看出由于该转换关系的存在,导致了上述转换关系的存在,导致模拟系统幅频响应与数字系统幅频响应不再线性对应,在高频部分发生严重畸变:
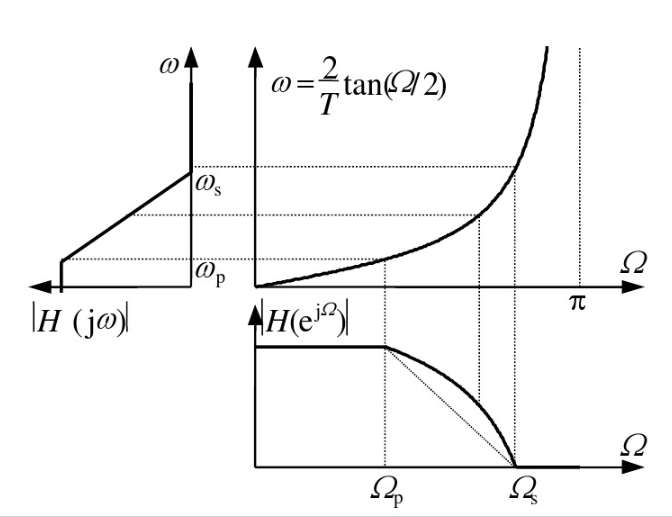
????注意到 w = ΩT,为了减小畸变,实际使用中可以将采样周期减小,使得tan(w/2) 约等于 w/2,则上转换公式等效于下式,从而减小了畸变 :

- 【viii】双线性变换的频率预扭曲
??这一做法的前提是希望所设计的离散控制器在指定的转折频率处的频率特性与连续控制器等效。
??设计步骤:
??【1】在希望的转折频率处,通常为零点或者极点,将 控制器传函D(s)中的( s + a )替换为 (s + a‘)得到D(s‘),其中:
??【2】将D(s‘)利用双线性公式转化得到D(z‘):
??【3】设离散控制器传函为D(z) = K * D(z‘)。
????当考虑低频段时直流增益设为1,通过下式解出K:
????当考虑高频段时直流增益设为1,通过下式解出K:
??【4】最终得到 D(z) = K * D(z‘)。
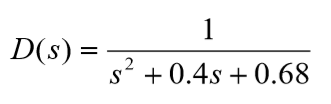
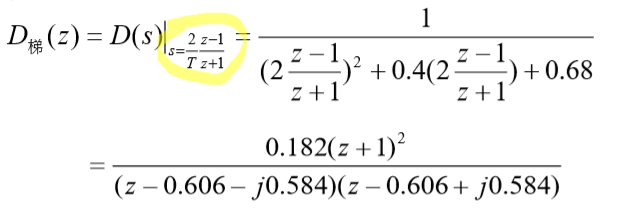
D、例题
??分别用前向矩形规则、后向矩形规则和梯形规则
对D(s)进行离散化,并求其极点,设采样周期 T =1s。
??解:
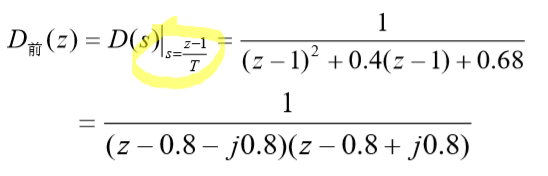
??<1>前向矩形规则
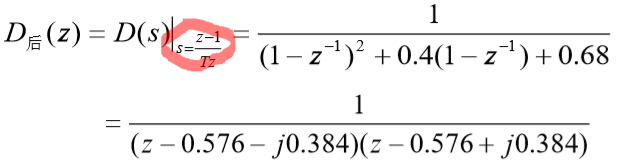
??<2>后向矩形规则
??<3>梯形规则
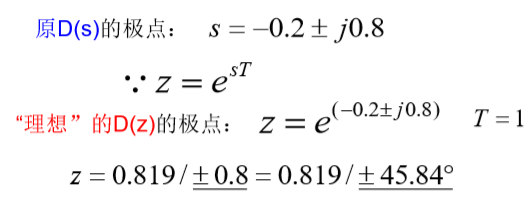
??求极点:

??对比理想D(s)的极点,可以发现梯形规则离散化效果更好:
(2)零极点匹配法
- 基本思想 -
??利用s平面与z平面映射关系
z = esT
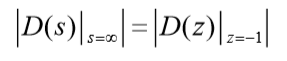
??将D(s)的零极点映射到D(z),这里需要注意s域无穷远处的零点映射问题;
??再通过某个主频率处 数字控制器的增益 与 模拟控制器的增益 相匹配的关系确定增益K。
A、转换步骤
【1】将D(s)写成零极点形式:
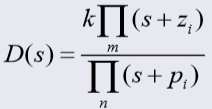
【2】利用z = esT完成D(z)和D(s)的零极点匹配。这里注意当D(s)绝对真时,即分母阶次m高于分子阶次n,对应D(z)的分子应该增加(z + 1)(m+n)因式,即将s = ∞处的零点映射到z = -1 处:

【3】确定D(z) 的直流增益k1(三种方法):
??a、 稳态增益相等,这种方法最常用:
??b、 高频增益相等,这种方法适用于有纯积分环节,即D(s)分子含有s项:
??c、 指定频率处增益相等

B、主要特性
【1】需要将D(s)分解为零极点形式,工程应用不够方便;
【2】由于该变换按照z = esT 进行零极点匹配,D(s)稳定,即极点全部位于s域左半平面,则D(z)一定稳定,即匹配的极点全位于单位圆内;
【3】由于分子匹配了(z+1)因子,因此频率不发生混叠(why?)
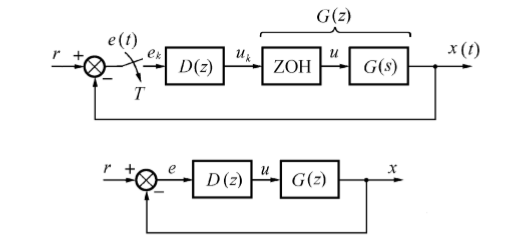
(3)等效保持法
- 基本思想 -
??所谓等效保持,指的是**当给定某种特定的输入信号时,t = kT时,连续控制器输出信号的采样值u*(t)和离散控制器的输出信号u(kT)相等**。
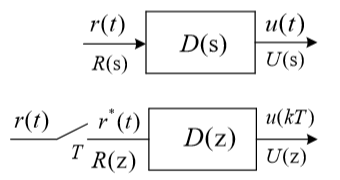
??即对于上述两个系统,有:

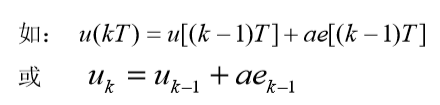
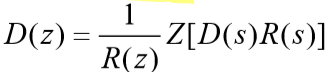
??略去中间过程,得到等效保持法的基本公式:

??即:
A、冲击响应不变转换 -- 输入信号为δ(t)
??注意到,当r(t) = δ(t)时,有
??得到冲击不变转换公式:

B、阶跃响应不变转换 -- 输入信号为l(t)
??注意到,当r(t) = l(t)时,有

??得到阶跃不变转换公式:
C、斜坡响应不变转换 -- 输入信号为 t * l(t)
??注意到,当r(t) = t * l(t)时,有

??得到阶跃不变转换公式:
三、各种转换方法的比较
(1)保留特性
- 数值积分法:保留控制器输出能量,这一点从稳态增益均为1可以看出;
- 等效保持法:可以实现连续系统及对应的离散系统对特定信号的时域响应一致;
零极点匹配法:保留相同数目的零极点。
(2)控制器特性的主要指标
??A、稳定性、零极点个数及位置
- 数值积分法:
??通过对比三种方法s域与z域映射关系图可以知道:- 前向矩形:不保证稳定
- 后向矩形:保证稳定
- 梯形规则(双线性规则):保证稳定
- 零极点匹配法
??由于零极点一一对应,所以若D(s)稳定,则D(z)稳定。 等效保持法:
??保证稳定。
??B、稳态增益
??稳态增益不变的定义为:
- 数值积分法:
??稳态增益不变。 - 零极点匹配法
??稳态增益可以不变,取决于直流增益k1的设计方法。 等效保持法:
??稳态增益改变。??C、动态响应及频率响应特性
??动态响应可包含阶跃响应、脉冲响应;频率响应主要考察系统的频带。- 数值积分法:
??通过该部分的例题,对比三者转换后的离散控制器极点与理想D(z)的极点位置:- 前向矩形:差的频率响应特性
- 后向矩形:差的频率响应特性
- 梯形规则(双线性规则):相近的频率响应特性
- 零极点匹配法
??由于零极点一一对应,所以离散控制器相近的频率响应特性 等效保持法:
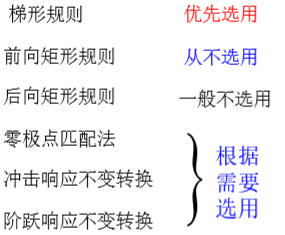
??该方法的基本思想就是为了得到相同的时域响应。四、各种方法的实际选用结论
以上是关于《模拟系统设计方法设计计算机控制系统》总结的主要内容,如果未能解决你的问题,请参考以下文章