高精度定位理论及应用
Posted wujianming-110117
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了高精度定位理论及应用相关的知识,希望对你有一定的参考价值。
高精度定位理论及应用
从移动互联到物联网,位置是一个基础的不可或缺的信息,但是从精细化的行业应用需求来说,只有更高精度的定位信息才能带来更高的价值,人们可以更加精确地知道事物所处的位置,知道人员具体位置在哪儿,更好的管理企业、人员或物资。比如说保障隧道施工人员人身安全,协助监狱搭建全局化、可视化的监管平台;提高石油化工行业安全保障效率;助力建筑工地智慧管理升级等等。
而以上行业在定位方案的超高定位精度、大容量、低延迟、高刷新率这几个指标上都具有很高的要求。
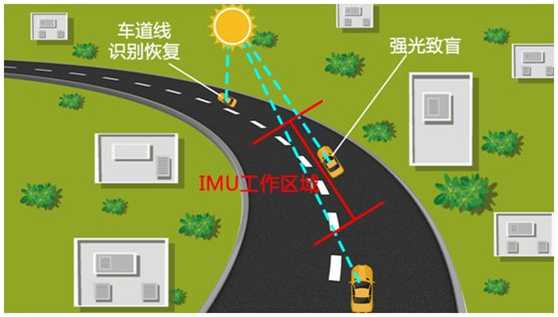
定位(Location)和导航(Navigation)技术是负责实时提供载体(如自动驾驶车辆)的运动信息,包括载体的位置、速度、姿态、加速度、角速度等。自动驾驶往往采用的是多传感器融合定位的方式。本文主要讲解IMU在自动驾驶定位中的应用。
高精度定位的工作原理
在无人车感知层面,定位的重要性不言而喻,无人车需要知道自己相对于环境的一个确切位置,这里的定位不能存在超过10cm的误差。
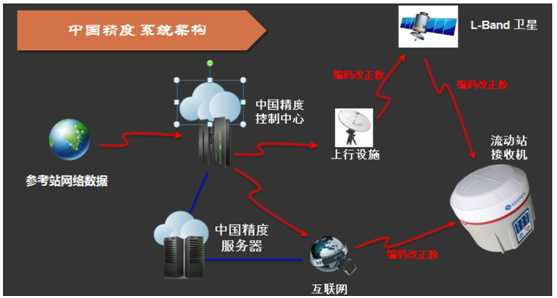
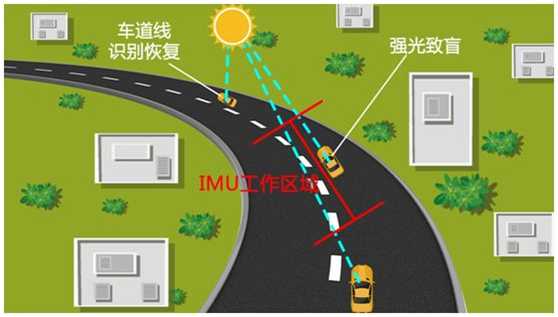
GPS可以为车辆提供精度为米级的绝对定位,差分GPS或RTK GPS可以为车辆提供精度为厘米级的绝对定位,然而并非所有的路段在所有时间都可以得到良好的GPS信号。因此,在自动驾驶领域,RTK GPS的输出一般都要与IMU,汽车自身的传感器(如轮速计、方向盘转角传感器等)进行融合。
IMU的全称是inertial measurement unit,即惯性测量单元,通常由陀螺仪、加速剂和算法处理单元组成,通过对加速度和旋转角度的测量得出自体的运动轨迹。我们把传统的IMU和与车身、GPS等信息融合的算法组合在一起的系统称为广义的、针对自动驾驶的IMU。
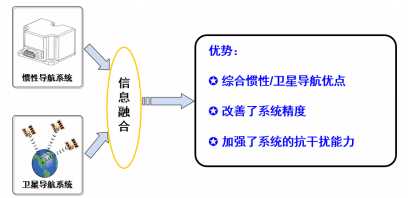
这个技术的出现弥补了 GPS 定位的不足,两者相辅相成,可以让自动驾驶汽车获得最准确的定位信息。目前使用最广泛的无人车定位方法当属融合全球定位系统(Global Positioning System,GPS)和惯性导航系统(Inertial Navigation System)定位方法。
组合导航涉及到复杂的坐标系转换,需要先对惯导系统做初始校准。一般是借助参考导航系统(如GNSS)给惯导系统一个初始位置值(目的是建立地理坐标系和地球坐标系的初始坐标转换矩阵)和初始速度值;通过IMU本身的测量值或借助测量仪器(倾角仪或双天线高精度GPS定向系统)获得初始姿态角(IMU输出的是载体坐标系相对于当地水平导航坐标系的姿态角,也叫欧拉角),对四元数和坐标转换矩阵进行初始化。
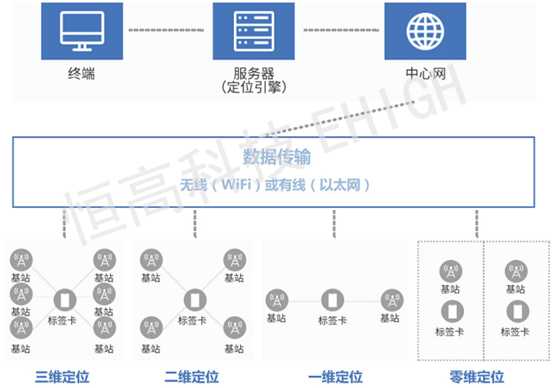
对于室内定位系统,需将自定义的局域直角坐标系(一般选择定位区域的某个角作为原点,边界线作为x轴,右手准则确定y轴,垂直地面向上作为z轴)作为导航坐标系,由于二者都是直角坐标系但坐标系的原点和方向不一样,需要进行原点位移和坐标轴旋转,因此也需要初始对准。初始对准结束后进入惯导推算过程,读取IMU的角速度测量值更新四元数和姿态变换矩阵,进而更新速度和位置,最后还可以将速度和位置转换到其他目标坐标系上进行表达,例如GNSS的经纬高地球坐标系。
高精度定位的方法
为了满足自动驾驶对导航与定位的要求,采用的方法有:
惯性导航 INS
目前自动驾驶常用的惯性测量单元(IMU),按照精度分可以为两类:第一类是基于光纤陀螺(FOG)的IMU,它的特点是精度高,但同时成本也高,一般应用于精度要求较高的地图采集车辆。第二类是基于微机电系统(MEMS)器件的IMU,它的特点是体积小,成本低,环境适应性强,但缺点是误差大。如果把它应用在自动驾驶车辆中,其需要经过比较复杂的处理。为了从IMU的原始数据得出导航定位输出,定位系统需要进行捷联惯性导航(SINS)解算,解算包括下面四个模块:
1. 通过陀螺输出的角速度信息积分得到姿态信息
2. 通过姿态信息对加速度计输出的比力进行转换,由载体坐标系得到导航坐标系
3. 进行重力计算,有害加速度、地球自转角速度等补偿计算
4. 由加速度信息积分得到速度与位置
不过需要注意的是,积分过程造成的输出误差会随着工作时间发生积累
全球导航卫星系统 GNSS
全球导航卫星定位是基于测距的绝对定位方案,其输出误差不会随着工作时间以及载体运动而发生变化。全球导航卫星定位的一个显著特点是由单频单系统向多频多系统转变,多频多系统在极大的程度上提高了我们导航系统的可靠性与可用性。另一个显著特点是精密定位,已在民用领域得到广泛应用。尤其是基于载波相位动态差分的RTK技术,在智能驾考、无人机、精密农业等领域都有所应用。然而由于GNSS是基于卫星定位的导航,这极大增加了定位的影响因子,也增大了定位结果的不确定性。另外一个脆弱性体现在信号干扰上。如果自动驾驶车辆本身以及加装设备导致车辆的电磁环境非常恶劣。
高精地图与线上激光 lidar 点云匹配定位
通过事先建立的高精度地图,配合线上的激光点云,定位系统也能实现绝对定位和厘米级高精度。这种方法的局限性则是增加了定位系统对高精地图的依赖。
里程计

自动驾驶获得车轮信息的方式有两种:外接和内置。
外接轮式传感器的特点是分辨率和精度都非常高,缺点是结构复杂,可靠性难以保证,一般更适用于地图采集车。内置轮式传感器的特点是无需外接设备,缺点是精度低,误差比较大,如果用于自动驾驶车辆,则需要经过多重的处理才行。不论是采用哪种方式,轮式传感器对于定位系统都十分重要。
结合车辆运动特性的运动约束
这种运动约束能保证极端的情况下,自动驾驶车辆的定位结果不至于产生极大的误差。
在无人驾驶中的应用
自动驾驶定位的方法不一而足,其涉及传感器也各不相同。因此自动驾驶往往采用的是多传感器融合定位的方式。多传感器融合定位一般包括以下几个部分:
- 数据预处理:包括惯性导航解算,GNSS的质量控制,激光雷达数据的误差补偿,还有基于轮式传感器的计算以及在线估计和补偿。
- 基于激光雷达数据和高精地图的匹配定位。
- 四个核心模块:
1. ZUPT/ZIHR/NHC,车辆运动约束部分
2. INS Alignment,惯性导航初始对准部分
3. Integrated,组合部分
4. FDI,故障检测与隔离部分
- 安全相关的模块:对于所有输出的完好性监测。
目前常用的导航定位优化方法,仍然基于传统的卡尔曼滤波器(Kalman Filter),其优化的指标是使状态方差达到最小。一般建立卡尔曼滤波器模型,首先要选择状态变量,目前多是基于导航参数误差和车载传感器误差,进行状态估计。随后,通过一步预测和量测更新,状态方程可以实现在时间域的递推。另外,定位系统的故障诊断与隔离可采用的传统软件方法有很多,比如卡方检测等,另一方面则可以借助硬件上的冗余实现。例如,通过配备多套 GNSS/IMU,定位系统能够配合软件解析余度实现多传感器冗余,提高可靠性。

产业
根据不同的使用场景,从手机定位、运动手表的步数记录,到自动驾驶汽车的高精度定位,对 IMU 的精度有不同的要求,精度高,也意味着成本高。
精度更高的 IMU 会用于导弹或航天飞机。为了让 IMU 获得更高的精度,在三个加速度计和三个陀螺仪的基础上,很多厂商还会添加磁力计,为了提高可靠性,有的还会增加传感器的数量。常见IMU厂商:
ADI
ADI 公司的 MEMS IMU 传感器以多轴方式组合精密陀螺仪、加速度计、磁力计和压力传感器。ADI 可以可靠地检测并处理多个自由度(DoF) 即便是极为复杂的应用和动态环境下。这些即插即用型解决方案包括完整的出厂校准、嵌入式补偿和传感器处理以及简单的可编程接口。
博世
博世的 IMU 模块主要应用于无人机和机器人,以及一些消费类的产品中。博世将两个 3 轴 MEMS 传感器集成到一个封装中,IMU 中的加速度传感器和陀螺仪的组合可以满足高级消费电子应用的需求,例如智能手机中的游戏控制台或游戏应用。
深迪半导体
深迪半导体是国内少数几家能将三轴陀螺仪和三轴加速度计集成到一个芯片中的厂商,深迪的IMU具有体积小、功耗低的特点,适用于消费电子市场,如稳定平台、车联网、机器人等。
以上是关于高精度定位理论及应用的主要内容,如果未能解决你的问题,请参考以下文章