ORB SLAM2 双目稀疏立体匹配学习
Posted guoben
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ORB SLAM2 双目稀疏立体匹配学习相关的知识,希望对你有一定的参考价值。
本节学习自6哥的ORBSLAM2解读
这部分主要在frame.cc文件中
对应函数为:
Frame::Frame(const cv::Mat &imLeft, const cv::Mat &imRight, const double &timeStamp, ORBextractor* extractorLeft, ORBextractor* extractorRight, ORBVocabulary* voc, cv::Mat &K, cv::Mat &distCoef, const float &bf, const float &thDepth) :mpORBvocabulary(voc),mpORBextractorLeft(extractorLeft),mpORBextractorRight(extractorRight), mTimeStamp(timeStamp), mK(K.clone()),mDistCoef(distCoef.clone()), mbf(bf), mThDepth(thDepth), mpReferenceKF(static_cast<KeyFrame*>(NULL))
ORBSLAM2对双目帧处理的主要步骤:
- ID自增
- 计算图像金字塔的参数
- 对左右图像提取ORB特征点, 使用双线程进行提取
- 用opencv的矫正函数,内参对提取到的特征点进行矫正
- 计算双目见特征点的匹配,只有匹配成功的特征点才会计算深度,深度存放在mvDepth中;
- 计算去畸变后边界
具体步骤
- ID自增
mnId=nNextId++;
- 计算图像金字塔的参数
mnScaleLevels = mpORBextractorLeft->GetLevels();
mfScaleFactor = mpORBextractorLeft->GetScaleFactor();
mfLogScaleFactor = log(mfScaleFactor);
mvScaleFactors = mpORBextractorLeft->GetScaleFactors();
mvInvScaleFactors = mpORBextractorLeft->GetInverseScaleFactors();
mvLevelSigma2 = mpORBextractorLeft->GetScaleSigmaSquares();
mvInvLevelSigma2 = mpORBextractorLeft->GetInverseScaleSigmaSquares();
- 对左右图像提取ORB特征点, 使用双线程进行提取
thread threadLeft(&Frame::ExtractORB,this,0,imLeft);
thread threadRight(&Frame::ExtractORB,this,1,imRight);
threadLeft.join();
threadRight.join();
- 用opencv的矫正函数,内参对提取到的特征点进行矫正
UndisortKeyPoints();
- 计算双目见特征点的匹配,只有匹配成功的特征点才会计算深度,深度存放在mvDepth中;
ComPuteStereoMatches();
- 计算去畸变后边界
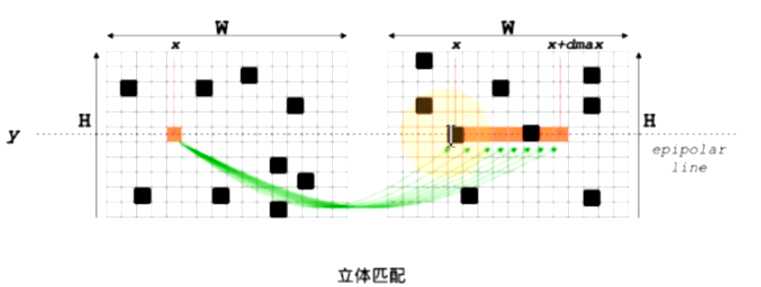
双目特征点匹配
本部分介绍上部分中的第5不
主要对应函数Frame::ComputeStereoMatches()。
输入:两帧立体矫正后的图像对应的ob特征点集
过程
- 行特征点统计
- 粗匹配
- 精确匹配SAD.
- 亚像素精度优化
- 最有视差值/深度选择
- 删除离群点( outliers)
输出:稀疏特征点视差图/深度图和匹配结果
视差公式
z:深度 d:视差(disparity)f:焦距 b:(baseline) 基线
(z=frac{fb}{d},d=u_L-u_R)
亚像素插值
// Sub-pixel match (Parabola fitting)
const float dist1 = vDists[L+bestincR-1];
const float dist2 = vDists[L+bestincR];
const float dist3 = vDists[L+bestincR+1];
const float deltaR = (dist1-dist3)/(2.0f*(dist1+dist3-2.0f*dist2));
if(deltaR<-1 || deltaR>1)
continue;
亚像素插值方法:
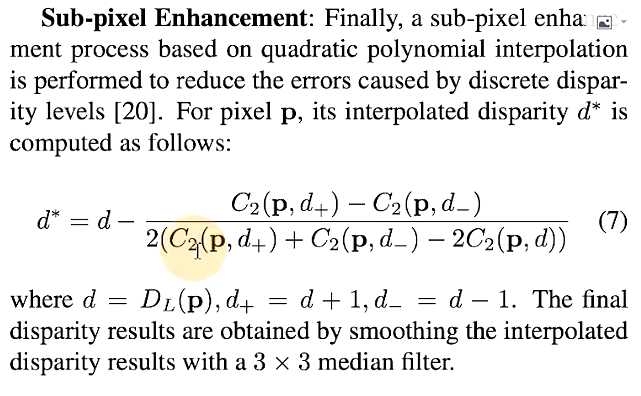
亚像素的误差在一个像素以内,所以修正量大一1时鉴定为误匹配。
- 最优视差值。深度选择
- 删除离群点(Outliers)
// 快匹配相似度阈值判断,快意话sad最小,不代表就是匹配的,比如光照变化,若纹理,无纹理都会造成误匹配
//误匹配判断条件 norm_sad > 1.5*1.4*median
sort(vDistIdx.begin(),vDistIdx.end()); //对dist进行排序
const float median = vDistIdx[vDistIdx.size()/2].first; //根据中值计算阈值
const float thDist = 1.5f*1.4f*median;
for(int i=vDistIdx.size()-1;i>=0;i--)
{
if(vDistIdx[i].first<thDist)
break;
else
{
mvuRight[vDistIdx[i].second]=-1;
mvDepth[vDistIdx[i].second]=-1;
}
}
以上是关于ORB SLAM2 双目稀疏立体匹配学习的主要内容,如果未能解决你的问题,请参考以下文章