四元数理论基础与工程应用方向
Posted liuzhenbo
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了四元数理论基础与工程应用方向相关的知识,希望对你有一定的参考价值。
空间中有三个旋转欧拉角α,β,γ,依次绕x,y,z旋转α,β,γ。可以通过构建旋转矩阵Rx,Ry,Rz得到旋转矩阵R=Rz(γ)Ry(β)Rx(α)
空间某点m(x,y,z)在新的坐标系下的坐标为:Rm(x,y,z)

旋转矩阵计算欧拉角公式:

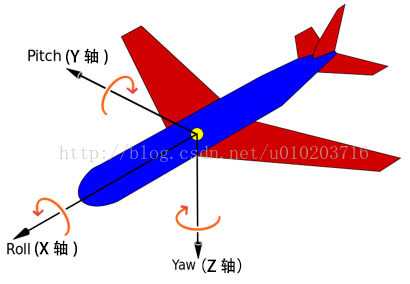
俯仰角θ(pitch):围绕Y轴旋转的角度。 偏航角ψ(yaw):围绕Z轴旋转的角度。 滚转角Φ(roll):围绕X轴旋转的角度。
现在我们如果想实现一个旋转,只要依次绕三个轴转对应的角度就可以实现。但是用欧拉角来表示旋转有一个非常大的缺陷,也就是万向锁也叫万向节死锁的问题,简单的说就是一旦选择±90°作为pitch角,就会导致第一次旋转和第三次旋转等价,整个旋转表示系统被限制在只能绕竖直轴旋转,丢失了一个表示维度。所以在通常有关旋转的应用场景中基本不使用欧拉角来旋转,而使用四元数Quaternion因为四元数可以实现平滑插值。
以上是关于四元数理论基础与工程应用方向的主要内容,如果未能解决你的问题,请参考以下文章