点云NDT配准方法介绍
Posted li-yao7758258
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了点云NDT配准方法介绍相关的知识,希望对你有一定的参考价值。
三维配准中经常被提及的配准算法是ICP迭代的方法,这种方法一般般需要提供一个较好的初值,也就是需要粗配准,同时由于算法本身缺陷,最终迭代结果可能会陷入局部最优,导致配准失败,往往达不到我们想要的效果。本文介绍的是另一种比较好的配准算法,NDT配准。所谓NDT就是正态分布变换,作用与ICP一样用来估计两个点云之间的刚体变换。用标准最优化技术来确定两个点云间的最优的匹配,因为其在配准过程中不利用对应点的特征计算和匹配,所以时间比其他方法快。这个配准算法耗时稳定,跟初值相关不大,初值误差大时,也能很好的纠正过来。
对比ICP配准方法需要提出不合适的点对,比如点对之间距离过大,包含了边界点对,每次迭代都要搜索最近点,计算代价较大。正态分布变换(NDT)算法是一种很有用途的点云配准方法,是一个一次性初始化工作,不需要消耗大量的代价计算最近邻搜索匹配点,并且概率密度函数在两幅图像采集之间的额时间可以离线计算出来,但仍在存在的问题很多,包括收敛域差、NDT代价函数的不连续性以及稀疏室外环境下不可靠的姿态估计等。
具体关于两种方法的对比可查看文献:http://www.diva-portal.org/smash/get/diva2:276162/FULLTEXT02.pdf
那么针对无损检测算法在二维和三维场景下的不足,也会有研究者们提出了相应的解决方法。为了改进二维扫描配准的无损检测收敛域,提出了一种多尺度K均值无损检测(MSKM-NDT)算法,利用K均值聚类对二维点云进行分割,并对多尺度聚类进行扫描配准优化。与标准无损检测算法相比,k-均值聚类方法生成的高斯分布更少,从而可以评估所有高斯聚类的成本函数,从而保证算法的收敛性。由于K均值聚类不能很好地扩展到三维,提出了分段贪婪聚类无损检测(SGC-NDT)方法,作为一种改进和保证三维点云收敛的替代方法,该点云包含与环境地面相对应的点。SGC-NDT算法使用高斯过程回归模型分割接地点,并使用贪婪方法对非接地点进行聚类。区域增长聚类算法提取环境中的自然特征,生成高斯聚类,在无损检测框架内用于扫描配准。涉及到的相关文献如下:
on Intelligent Robots and Systems. Villamoura, Portugal; 2012.
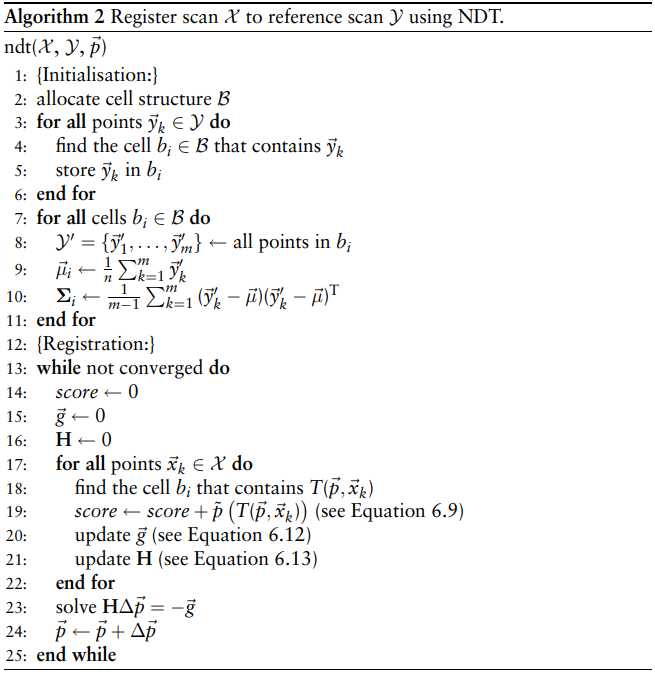
那么接下里就具体介绍一下NDT算法的步骤
(1)该算法的第一步是将扫描占用的空间细分为单元格网格(2D图像中的正方形或3D中的立方体),基于单元内的点分布计算每个单元的PDF。 每个单元格中的PDF可以解释为单元格内表面点x^的生成过程。将点云投票到各个格子中,计算每个格子的PDF,PDF可以当做表面的近似表达,协方差矩阵的特征向量和特征值可以表达表面信息(朝向、平整度) 格子内少于3个点,经常会协方差矩阵不存在逆矩阵,所以只计算点数大于5的cell,涉及到下采样方法。
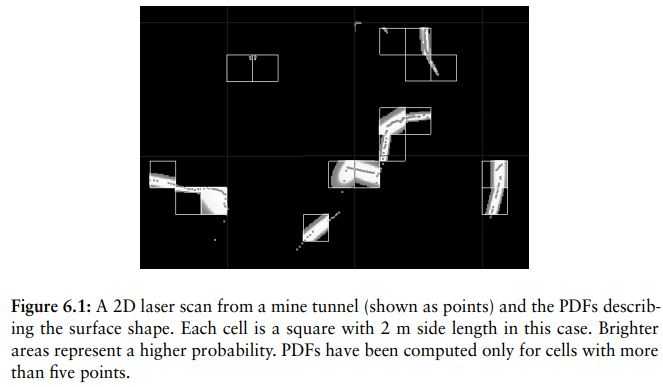
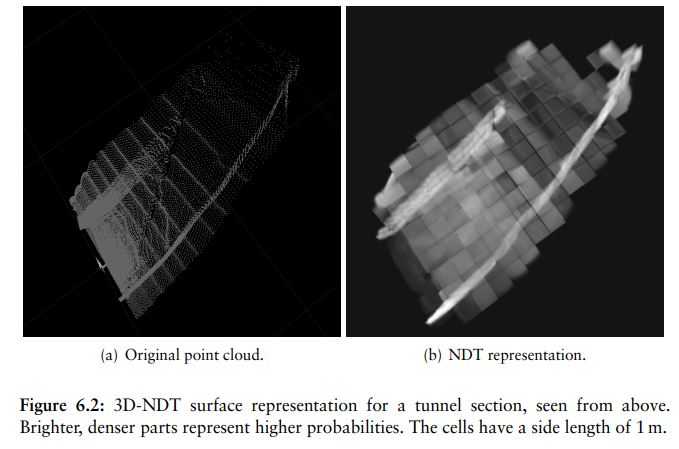
正态分布给出了点云的分段平滑表示,具有连续导数。 每个PDF都可以看作是局部表面的近似值,描述了表面的位置以及它的方向和平滑度。 2D激光扫描及其相应的正态分布如图6.1所示。 图6.2显示了矿井隧道扫描的3D正态分布。
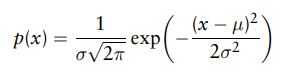
由于目前的工作主要集中在正态分布上,让我们更仔细地研究单变量和多变量正态分布的特征。 在一维情况下,正态分布的随机变量x具有一定的期望值μ,并且关于该值的不确定性用方差σ表示。
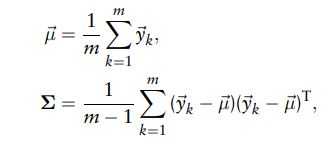
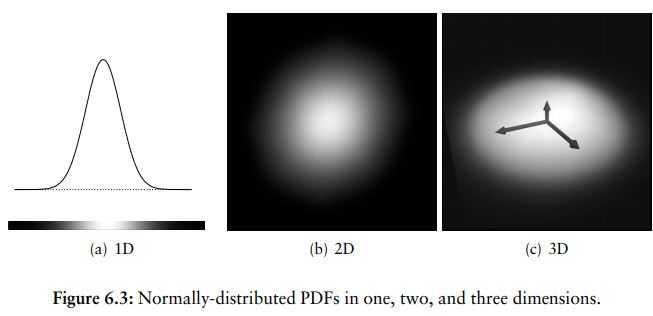
在多维的情况下,平均值和方差由平均向量 μ和协方差来描述矩阵Σ。 协方差矩阵的对角元素表示方差每个变量,非对角线元素表示的是协方差变量。 图6.3说明了一维,二维和三维的正态分布
(2)将第二幅扫描点云的每个点按转移矩阵T的变换。
(3)第二幅扫描点落于参考帧点云的哪个 格子,计算响应的概率分布函数

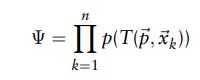
(4)当使用NDT进行扫描点配准时,目标是找到当前扫描点的位姿,以最大化当前扫描的点位于参考扫描表面上的可能性,该位姿是要优化的参数; 也就是说,当前扫描的点云估计的旋转和平移向量。求所有点的最优值,目标函数为
2D-NDT
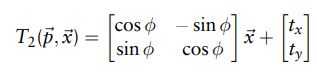
对于2D配准,有三个要优化的转换参数。 让p = [tx,ty,φ]T,其中 tx 和 ty 是平移参数,φ是旋转角度。 使用逆时针旋转,2D变换功能是
3D-NDT
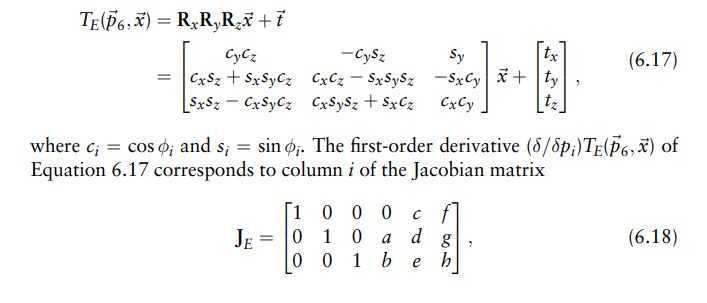
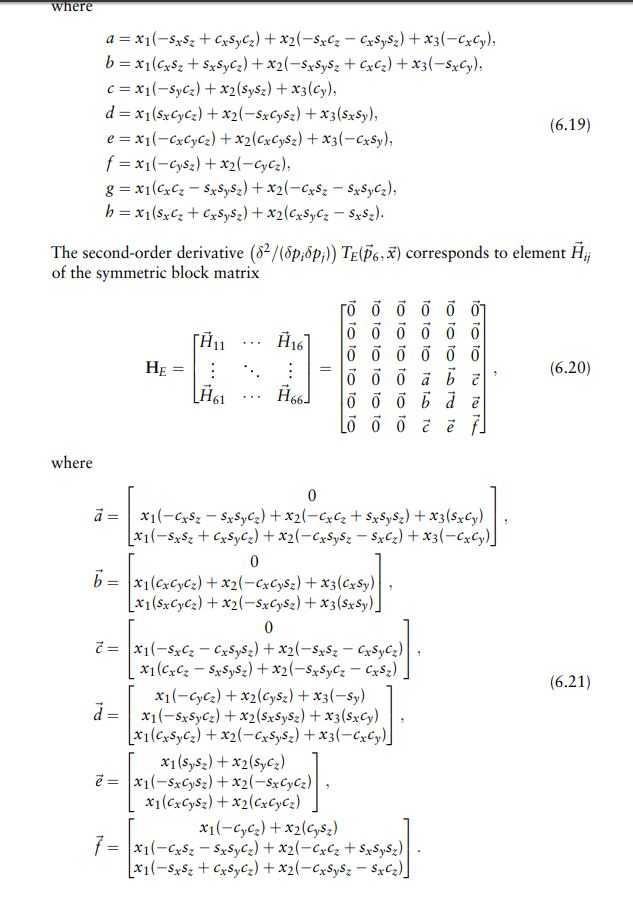
NDT的2D和3D配准的主要区别在于空间变换函数T( p, x)及其偏导数。3D NDT使用欧拉角,有六个转换要优化的参数:三个用于平移,三个用于旋转。
可以使用六维参数矢量对姿势进行编码 p6 = [tx,ty,tz,φx,φy,φz]T
使用欧拉序列z-y-x,3D变换函数是
更具体的解释可查看文献
在PCL中给出的NDT例子如下
http://pointclouds.org/documentation/tutorials/normal_distributions_transform.php#normal-distributions-transform
以上是关于点云NDT配准方法介绍的主要内容,如果未能解决你的问题,请参考以下文章