图像识别的一些基础
Posted pylblog
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了图像识别的一些基础相关的知识,希望对你有一定的参考价值。
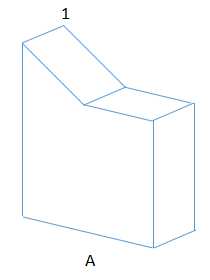
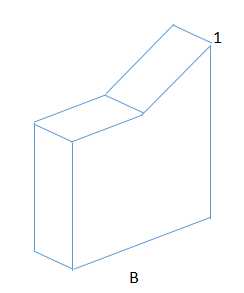
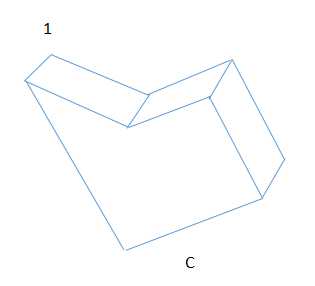
以上是四副正射影像图,提取好边线,对于每个角点,能自动匹配标记好号码1~n;
*在距离物体的距离,大于物体的2.5倍,那么,就可以忽略物体的透视,认为得到物体的影像是正射影像;
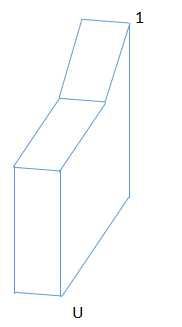
已知ABC是同一物体的正射影像,而U是同类物体,但不一定是同一物体的正射影像。
对于各个点,有:
XU1 = aXA1 + bXB1 + cXC1 + d
XU2 = aXA2 + bXB2 + cXC2 + d
XU3 = aXA3 + bXB3 + cXC3 + d
XU4 = aXA4 + bXB4 + cXC4 + d
*想在一下,只有旋转没有平移的平面旋转 Xt = A Xs ,A是2*2的矩阵,Xt是XY
以上可以化为矩阵的形式,解出a,b,c,d;
XU1 XA1 XB1 XC1 1 a
XU2 = XA2 XB2 XC2 1 b
XU3 XA3 XB3 XC3 1 c
XU4 XA4 XB4 XC4 1 d
那么,可以预测U5,如果U5预测的位置和标记出的位置不相同,那就有理由相信,U5和ABC中的物体,不是同一个物体;
另一种识别的办法,就是用信号的原理,求积分:
对于信号函数,假如f(x)g(x)在X0处同号,那就取得很大的值如果有:
∫F(x)g1(x)dx,∫F(x)g2(x)dx……
取得最大只者,F(x)和g(x)最相似;
假如人脸的图像,都规定缩放在一个特定的尺寸,而且先进行二值化处理;
然后逐个像素两两相乘,得出最大者;
或者对两幅图像建模,灰度函数也可:
∫D f(x,y)g(x,y)dxdy
以上是关于图像识别的一些基础的主要内容,如果未能解决你的问题,请参考以下文章