ROS-ROS命令
Posted kay2018
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ROS-ROS命令相关的知识,希望对你有一定的参考价值。
1.ROS命令概述
ROS可以通过在shell环境中输入命令来进行文件系统的使用、源代码编辑、构建、调试和功能包管理等。为了正确使用ROS,除了基本的Linux命令之外,还需要熟悉ROS专用命令。为了熟练掌握ROS的各种命令,我们对每个命令的功能进行了简单的描述,并给出了例子。在介绍每条命令时,考虑到使用的频率和重要性,标了星级评分。虽然很难从一开始就很熟练地使用所有的命令,但是随着使用的次数增多,读者会发现越来越方便快捷地使用各个ROS命令。
2.ROS shell命令
ROS shell命令又被称为rosbash。这使我们可以在ROS开发环境中使用Linux中常用的bash shell命令。我们主要使用前缀是ros且带有多种后缀的命令,例如cd、pd、d、ls、ed、cp和run。相关命令如下。
| 命令 | 重要度 | 命令释义 | 详细说明 |
| roscd | ★★★ | ros+cd(changes directory) | 移动到指定的ROS功能包目录 |
| rosls | ★☆☆ | ros+ls(lists files) | 显示ROS功能包的文件和目录 |
| rosed | ★☆☆ | ros+ed(editor) | 编辑ROS功能包的文件 |
| roscp | ★☆☆ | ros+cp(copies files) | 复制ROS功能包的文件 |
想要使用ROS shell命令,需要用以下命令安装rosbash,并且只能在设置了source /opt/ros/<rosdistribution>/setup.bash的终端窗口中可以使用。
sudo apt-get install ros-<ros distribution>-rosbash
我们来看看其中相对常见的roscd、rosls和rosed命令。
3. roscd:移动ROS目录
roscd [功能包名称]
这是一个移动到保存有功能包的目录的命令。该命令的基本用法是在roscd命令之后将功能包名称写入参数。在以下示例中,turtlesim功能包位于安装ROS的目录中,但是,如果将创建的功能包名称(例如,我自己创建的beginner_tutorials)作为参数,则会移至您指定的功能包的目录。这是在使用基于命令行的ROS时常用的命令。

请注意,要运行此示例并获得相同的结果,必须安装相关功能包ros-indigo-turtlesim。如果未安装,请使用以下命令进行安装。
sudo apt-get install ros-indigo-turtlesim
如果已经安装,将可以看到如下所示的功能包的消息。
4. rosls:ROS文件列表
rosls [功能包名称]
该命令查看指定的ROS功能包的文件列表。您可以使用roscd命令移动到功能包,然后使用正常的ls命令执行相同的功能,但有时需要立即查看。实际中并不经常使用。

5. rosed:ROS编辑命令
rosed [功能包名称] [文件名称]
该命令用于编辑功能包中的特定文件。运行时,它会用用户设置的编辑器打开文件。用于快速修改相对简单的内容。这时用到的编辑器可以在~/.bashrc文件中进行指定,如:export EDITOR=‘emacs -nw’。如前所述,它用于需要在命令窗口中直接修改的简单任务,因此不推荐用于除此之外的编写程序的任务。这不是一个经常使用的命令。
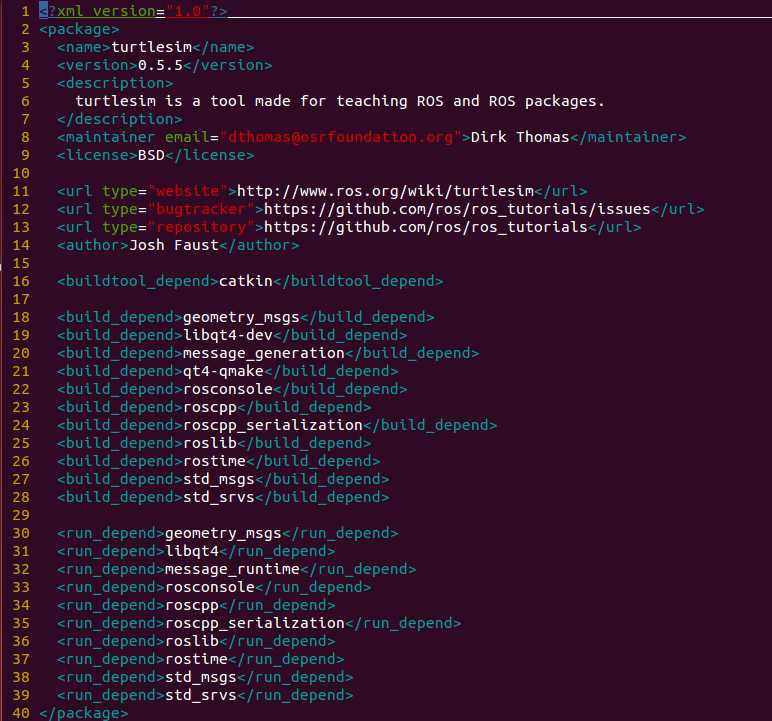
rosed turtlesim package.xml

运行后:
以上是关于ROS-ROS命令的主要内容,如果未能解决你的问题,请参考以下文章
VSCode自定义代码片段15——git命令操作一个完整流程