Velodyne 线性激光雷达数据合成
Posted radiumlrb
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Velodyne 线性激光雷达数据合成相关的知识,希望对你有一定的参考价值。
如果想用字母表示角度,有两个方法:
1. 用三角函数sind(θ4)、cosd(θ4)、tand(θ4)、atand(θ4)进行表示,注意:θ4在输入时是角度,只是没有度数特有的符号(°)而已。
2. 用deg2rad将角度转换为弧度。45度就是45/180*pi,60度就是60/180*pi。pi=3.1415。
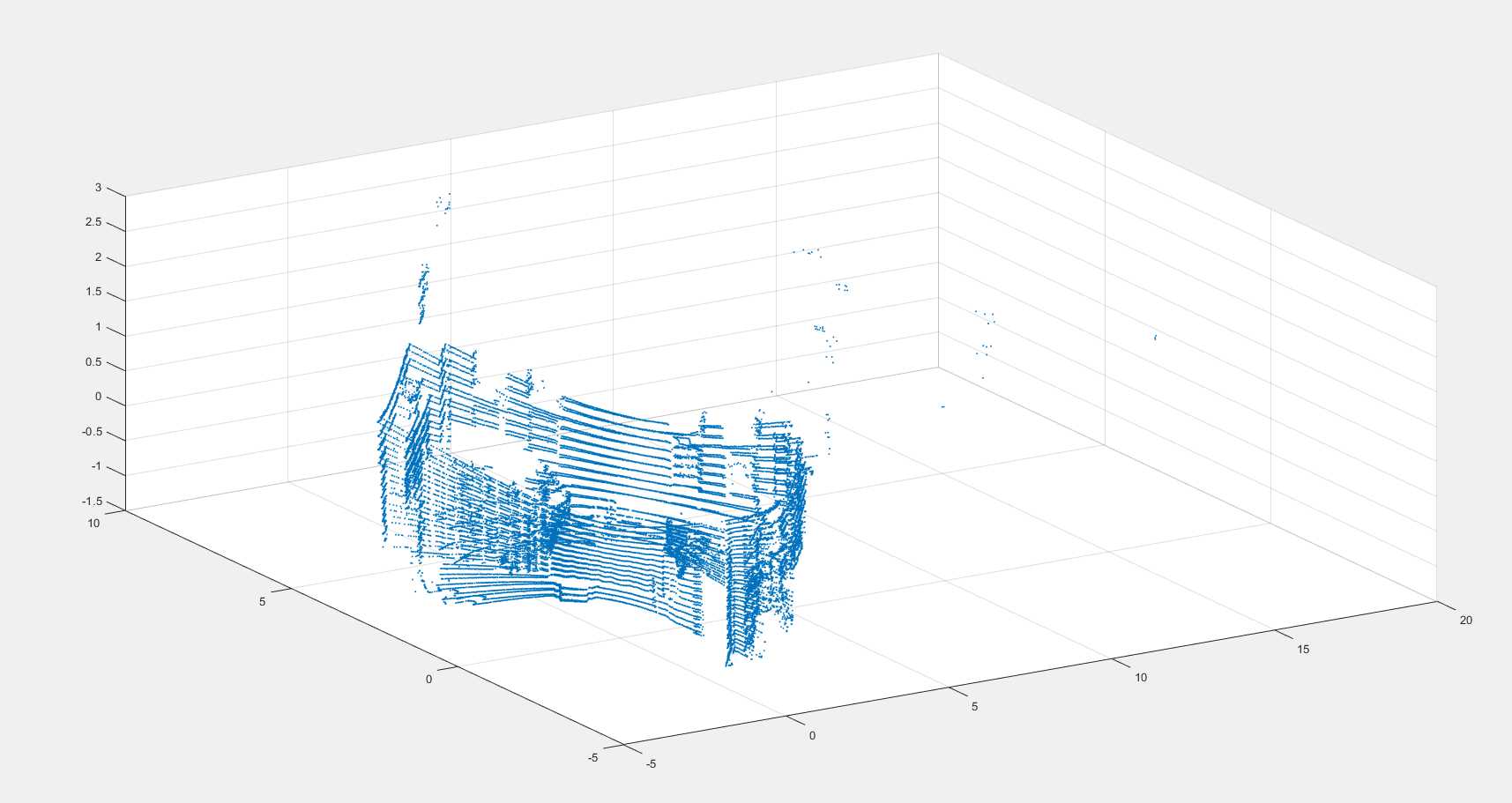
clear m = csvread(‘zero_1.csv‘, 2, 0); n = csvread(‘one_1.csv‘, 2, 0); for i=1:1:3 m1(:,i)=m(:,i); n1(:,i)=n(:,i); end k=36/180*pi; k1=1/180*pi; trans=[cos(k) sin(k) 0;-sin(k) cos(k) 0;0 0 1]; trans1=[01 0 0;0 cos(k1) sin(k1);0 -sin(k1) cos(k1)]; trans2=[cos(-k) sin(-k) 0;-sin(-k) cos(-k) 0;0 0 1]; tmp=(trans2*trans1*trans*n1‘)‘; tmp=[tmp;m1]; scatter3(tmp(:,1),tmp(:,2),tmp(:,3),1) %scatter3(m(:,1),m(:,2),m(:,3),1) %scatter3(n(:,1),n(:,2),n(:,3),1)
以上是关于Velodyne 线性激光雷达数据合成的主要内容,如果未能解决你的问题,请参考以下文章