ROS-SLAM-自主导航
Posted chendeqiang
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ROS-SLAM-自主导航相关的知识,希望对你有一定的参考价值。
前言:无。
一、启动仿真环境
cd ~/catkin_ws/src/robot_mrobot/mrobot_gazebo/launch
roslaunch mrobot_laser_nav_gazebo.launch
二、启动slam导航
cd ~/catkin_ws/src/robot_mrobot/mrobot_navigation/launch
roslaunch exploring_slam_demo.launch
三、手动探索
使用rviz的“2D nav goal”手动选择目的地,机器人开始导航,同时使用mapping算法实时构建地图。
效果如下;
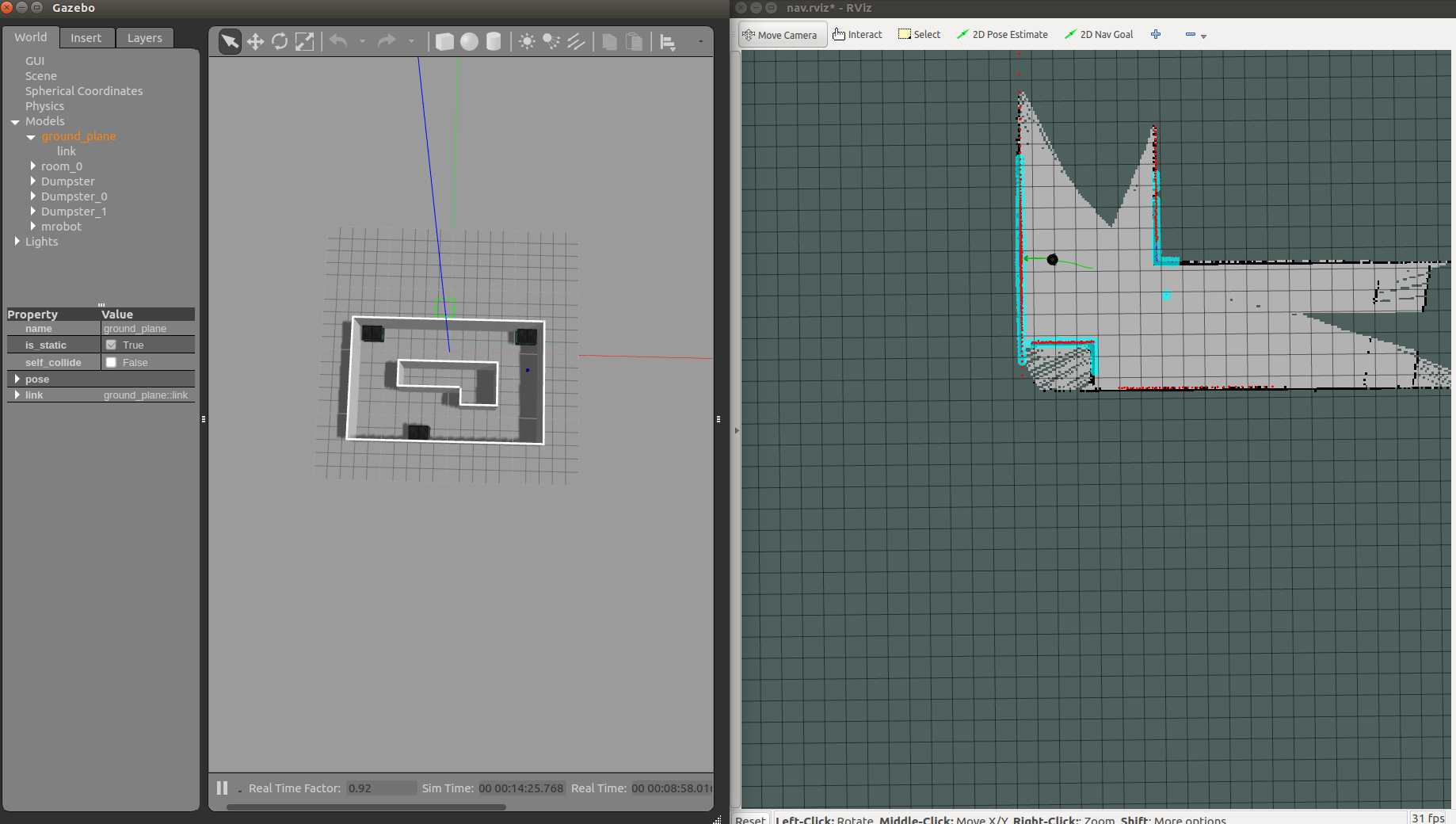
如果多次尝试无果,机器人最终会放弃,终端里将看到错误提示。
四、自动slam导航
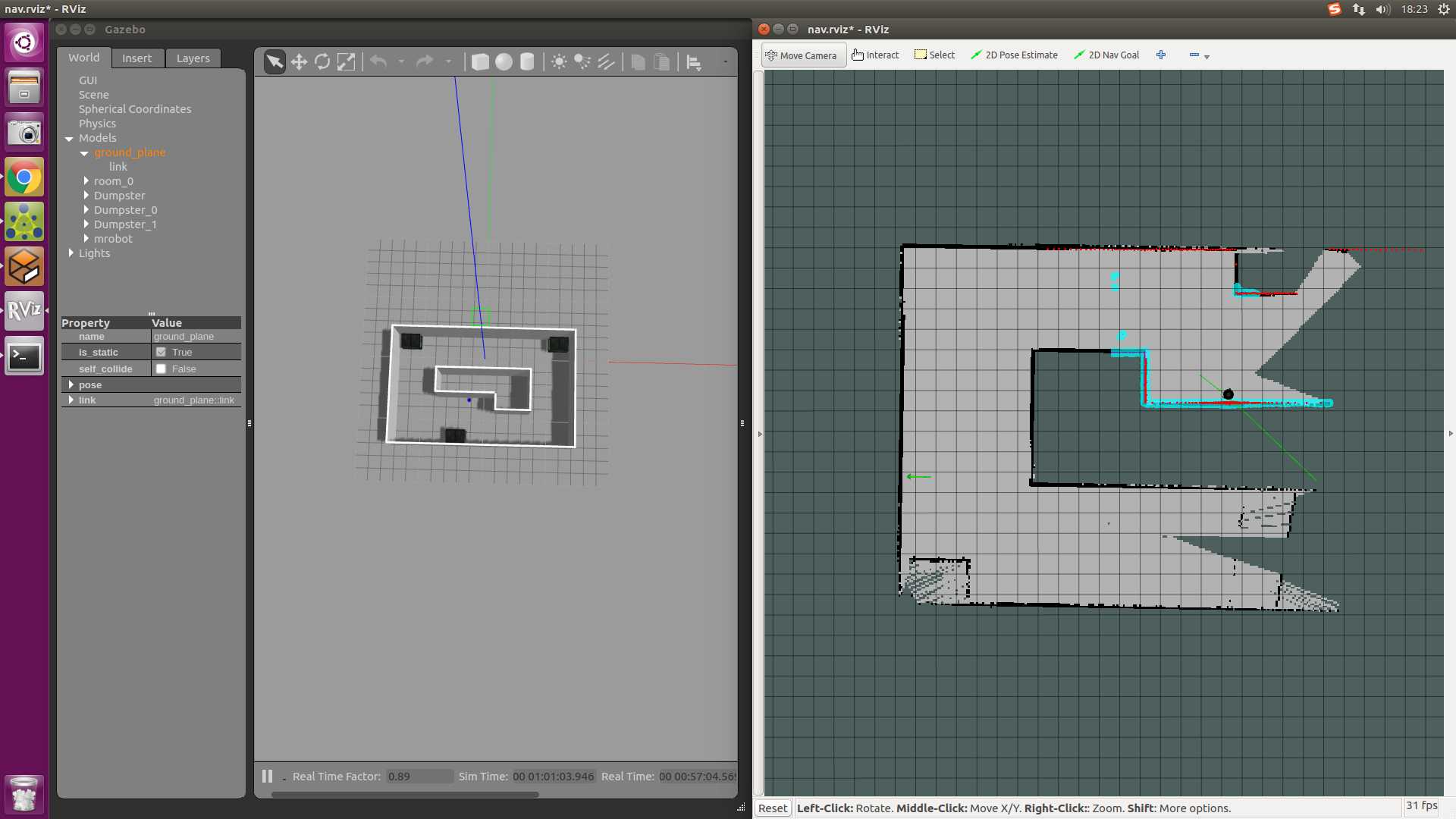
rosrun mrobot_navigation random_navigation.py
----------------------------------
显示如下:
-END-
以上是关于ROS-SLAM-自主导航的主要内容,如果未能解决你的问题,请参考以下文章