基于图的图像分割(Graph-Based Image Segmentation)
Posted sddai
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了基于图的图像分割(Graph-Based Image Segmentation)相关的知识,希望对你有一定的参考价值。
一、介绍
基于图的图像分割(Graph-Based Image Segmentation),论文《Efficient Graph-Based Image Segmentation》,P. Felzenszwalb, D. Huttenlocher,International Journal of Computer Vision, Vol. 59, No. 2, September 2004
论文下载和论文提供的C++代码在这里。
Graph-Based Segmentation是经典的图像分割算法,其作者Felzenszwalb也是提出DPM(Deformable Parts Model)算法的大牛。
Graph-Based Segmentation算法是基于图的贪心聚类算法,实现简单,速度比较快,精度也还行。不过,目前直接用它做分割的应该比较少,很多算法用它作垫脚石,比如Object Propose的开山之作《Segmentation as Selective Search for Object Recognition》就用它来产生过分割(over segmentation)。
二、图的基本概念
因为该算法是将图像用加权图抽象化表示,所以补充图的一些基本概念。
1、图
是由顶点集V(vertices)和边集E(edges)组成,表示为G=(V, E),顶点v∈V,在论文即为单个的像素点,连接一对顶点的边(vi, vj)具有权重w(vi, vj),本文中的意义为顶点之间的不相似度(dissimilarity),所用的是无向图。
2、树
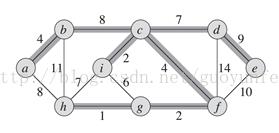
特殊的图,图中任意两个顶点,都有路径相连接,但是没有回路。如下图中加粗的边所连接而成的图。如果看成一团乱连的珠子,只保留树中的珠子和连线,那么随便选个珠子,都能把这棵树中所有的珠子都提起来。
如果顶点i和h这条边也保留下来,那么顶点h,i,c,f,g就构成了一个回路。
3、最小生成树(minimum spanning tree)
特殊的树,给定需要连接的顶点,选择边权之和最小的树。
论文中,初始化时每一个像素点都是一个顶点,然后逐渐合并得到一个区域,确切地说是连接这个区域中的像素点的一个MST。如下图,棕色圆圈为顶点,线段为边,合并棕色顶点所生成的MST,对应的就是一个分割区域。分割后的结果其实就是森林。

三、相似性
既然是聚类算法,那应该依据何种规则判定何时该合二为一,何时该继续划清界限呢?对于孤立的两个像素点,所不同的是灰度值,自然就用灰度的距离来衡量两点的相似性,本文中是使用RGB的距离,即

当然也可以用perceptually uniform的Luv或者Lab色彩空间,对于灰度图像就只能使用亮度值了,此外,还可以先使用纹理特征滤波,再计算距离,比如先做Census Transform再计算Hamming distance距离。
四、全局阈值 >> 自适应阈值,区域的类内差异、类间差异
上面提到应该用亮度值之差来衡量两个像素点之间的差异性。对于两个区域(子图)或者一个区域和一个像素点的相似性,最简单的方法即只考虑连接二者的边的不相似度。如下图,已经形成了棕色和绿色两个区域,现在通过紫色边来判断这两个区域是否合并。那么我们就可以设定一个阈值,当两个像素之间的差异(即不相似度)小于该值时,合二为一。迭代合并,最终就会合并成一个个区域,效果类似于区域生长:星星之火,可以燎原。

举例说明:

对于上右图,显然应该聚成上左图所示的3类:高频区h,斜坡区s,平坦区p。
如果我们设置一个全局阈值,那么如果h区要合并成一块的话,那么该阈值要选很大,但是那样就会把p和s区域也包含进来,分割结果太粗。如果以p为参考,那么阈值应该选特别小的值,那样的话p区是会合并成一块,但是h区就会合并成特别特别多的小块,如同一面支离破碎的镜子,分割结果太细。显然,全局阈值并不合适,那么自然就得用自适应阈值。对于p区该阈值要特别小,s区稍大,h区巨大。
先来两个定义,原文依据这两个附加信息来得到自适应阈值。
一个区域内的类内差异Int(C):

可以近似理解为一个区域内部最大的亮度差异值,定义是MST中不相似度最大的一条边。
俩个区域的类间差异Diff(C1, C2):

即连接两个区域所有边中,不相似度最小的边的不相似度,也就是两个区域最相似的地方的不相似度。
直观的判断,当:

时,两个区域应当合并!
五、算法步骤
1、计算每一个像素点与其8邻域或4邻域的不相似度。

如上图,实线为只计算4领域,加上虚线就是计算8邻域,由于是无向图,按照从左到右,从上到下的顺序计算的话,只需要计算右图中灰色的线即可。
2、将边按照不相似度non-decreasing排列(从小到大)排序得到e1, e2, ..., en。
3、选择ei
4、对当前选择的边ej(vi和vj不属于一个区域)进行合并判断。设其所连接的顶点为(vi, vj),
if 不相似度小于二者内部不相似度:
5、更新阈值以及类标号
else:
6、如果i < n,则按照排好的顺序,选择下一条边转到Step 4,否则结束。
六、论文提供的代码
打开本博文最开始的连接,进入论文网站,下载C++代码。下载后,make编译程序。命令行运行格式:
/******************************************** sigma 对原图像进行高斯滤波去噪 k 控制合并后的区域的数量 min: 后处理参数,分割后会有很多小区域,当区域像素点的个数小于min时,选择与其差异最小的区域合并 input 输入图像(PPM格式) output 输出图像(PPM格式) sigma: Used to smooth the input image before segmenting it. k: Value for the threshold function. min: Minimum component size enforced by post-processing. input: Input image. output:Output image. Typical parameters are sigma = 0.5, k = 500, min = 20. Larger values for k result in larger components in the result. */ ./segment sigma k min input output
七、OpenCV3.3 cv::ximgproc::segmentation::GraphSegmentation类
/opencv_contrib/modules/ximgproc/include/opencv2/ximgproc/segmentation.hpp
以上是关于基于图的图像分割(Graph-Based Image Segmentation)的主要内容,如果未能解决你的问题,请参考以下文章
阙值分割基于matlab粒子群算法自适应多阈值图像分割含Matlab源码 1459期
阙值分割基于matlab粒子群算法自适应多阈值图像分割含Matlab源码 1459期