Cs231n课堂内容记录-Lecture2
Posted yun-an
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Cs231n课堂内容记录-Lecture2相关的知识,希望对你有一定的参考价值。
Lecture 2
课程内容记录:(上)https://zhuanlan.zhihu.com/p/20894041?refer=intelligentunit
(下)https://zhuanlan.zhihu.com/p/20900216
numpy文档翻译:https://zhuanlan.zhihu.com/p/20878530?refer=intelligentunit
1.最近邻分类器(NN):
a[0]为第一行像素。图片像素转换形成的numpy矩阵(800,500,3)中,第一个参数为像素行数,第二个参数为像素列数,第三个参数是通道数。
2.关于L1和L2距离(KNN):
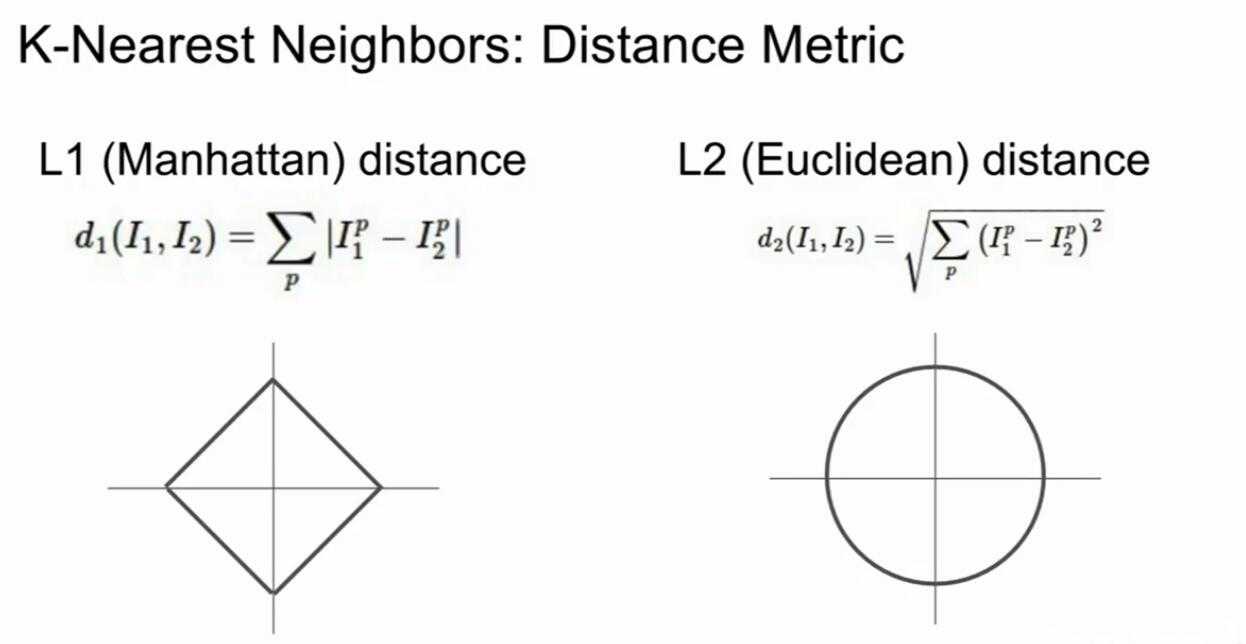
如果离原点距离都是1的话,L1距离的点如图所示,比如第一象限(0.5,0.5)满足上图。L2距离则为圆,(sinx,cox)满足上式,所以L1距离有坐标轴的依赖性,而L2距离对坐标轴旋转变换不变。所以如果你的向量具有某种实际意义,与坐标轴的关系明确,那么L1是比较好的选择。
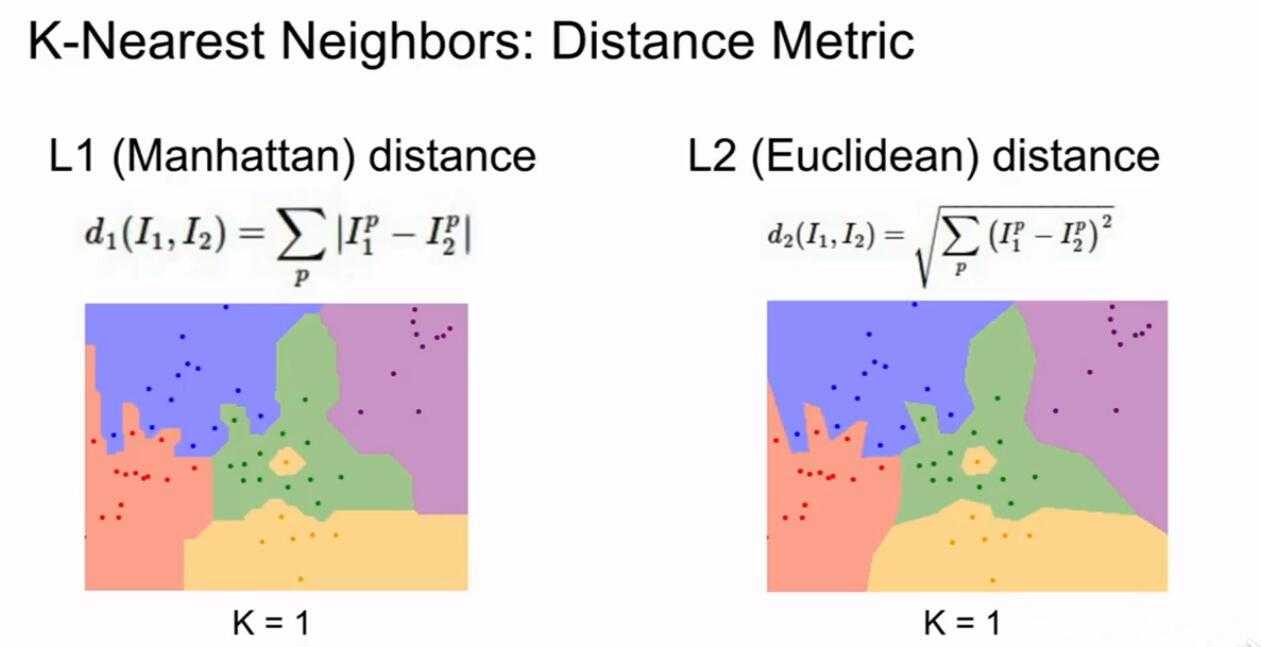
从上图我们可以看到,L1距离得到的分类决策边界更倾向于沿着坐标轴的方向(因为这时距离最大,最容易形成边界),而L2只是形成了最自然的形状。
3.关于k折交叉验证和k最近邻算法:
k最近邻算法(kNN)是考虑离观察点最近的k个点并让他们投票决定谁是最近的点。而k折交叉验证是将训练集分成k份,两个k是完全不同的。
以上是关于Cs231n课堂内容记录-Lecture2的主要内容,如果未能解决你的问题,请参考以下文章