py-R-FCN的caffe配置(转)
Posted xiaochouk
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了py-R-FCN的caffe配置(转)相关的知识,希望对你有一定的参考价值。
参考:https://blog.csdn.net/wei_guo_xd/article/details/74451443
下载程序,
git clone https://github.com/Orpine/py-R-FCN.git
打开py-R-FCN,下载caffe
git clone https://github.com/Microsoft/caffe.git
编译Cython模块
cd lib
make
结果如下图所示:
编译caffe和pycaffe
cd caffe
cp Makefile.config.example MAkefile.config
然后配置Makefile.config文件,可参考我的Makefile.config
## Refer to http://caffe.berkeleyvision.org/installation.html
# Contributions simplifying and improving our build system are welcome!
# cuDNN acceleration switch (uncomment to build with cuDNN).
USE_CUDNN := 1
# CPU-only switch (uncomment to build without GPU support).
# CPU_ONLY := 1
# uncomment to disable IO dependencies and corresponding data layers
# USE_OPENCV := 0
# USE_LEVELDB := 0
# USE_LMDB := 0
# uncomment to allow MDB_NOLOCK when reading LMDB files (only if necessary)
# You should not set this flag if you will be reading LMDBs with any
# possibility of simultaneous read and write
# ALLOW_LMDB_NOLOCK := 1
# Uncomment if you‘re using OpenCV 3
# OPENCV_VERSION := 3
# To customize your choice of compiler, uncomment and set the following.
# N.B. the default for Linux is g++ and the default for OSX is clang++
# CUSTOM_CXX := g++
# CUDA directory contains bin/ and lib/ directories that we need.
CUDA_DIR := /usr/local/cuda
# On Ubuntu 14.04, if cuda tools are installed via
# "sudo apt-get install nvidia-cuda-toolkit" then use this instead:
# CUDA_DIR := /usr
# CUDA architecture setting: going with all of them.
# For CUDA < 6.0, comment the *_50 lines for compatibility.
CUDA_ARCH := -gencode arch=compute_30,code=sm_30
-gencode arch=compute_35,code=sm_35
-gencode arch=compute_50,code=sm_50
-gencode arch=compute_50,code=compute_50
-gencode arch=compute_53,code=compute_53
-gencode arch=compute_61,code=compute_61
# BLAS choice:
# atlas for ATLAS (default)
# mkl for MKL
# open for OpenBlas
BLAS := open
# Custom (MKL/ATLAS/OpenBLAS) include and lib directories.
# Leave commented to accept the defaults for your choice of BLAS
# (which should work)!
# BLAS_INCLUDE := /path/to/your/blas
# BLAS_LIB := /path/to/your/blas
# Homebrew puts openblas in a directory that is not on the standard search path
# BLAS_INCLUDE := $(shell brew --prefix openblas)/include
# BLAS_LIB := $(shell brew --prefix openblas)/lib
# This is required only if you will compile the matlab interface.
# MATLAB directory should contain the mex binary in /bin.
MATLAB_DIR := /usr/local/MATLAB/R2013b
# MATLAB_DIR := /Applications/MATLAB_R2012b.app
# NOTE: this is required only if you will compile the python interface.
# We need to be able to find Python.h and numpy/arrayobject.h.
PYTHON_INCLUDE := /usr/include/python2.7
/usr/lib64/python2.7/site-packages/numpy/core/include
/usr/lib/python2.7/dist-packages/numpy/core/include
# Anaconda Python distribution is quite popular. Include path:
# Verify anaconda location, sometimes it‘s in root.
# ANACONDA_HOME := $(HOME)/anaconda
# PYTHON_INCLUDE := $(ANACONDA_HOME)/include
# $(ANACONDA_HOME)/include/python2.7
# $(ANACONDA_HOME)/lib/python2.7/site-packages/numpy/core/include
# Uncomment to use Python 3 (default is Python 2)
# PYTHON_LIBRARIES := boost_python3 python3.5m
# PYTHON_INCLUDE := /usr/include/python3.5m
# /usr/lib/python3.5/dist-packages/numpy/core/include
# We need to be able to find libpythonX.X.so or .dylib.
PYTHON_LIB := /usr/lib
# PYTHON_LIB := $(ANACONDA_HOME)/lib
# Homebrew installs numpy in a non standard path (keg only)
# PYTHON_INCLUDE += $(dir $(shell python -c ‘import numpy.core; print(numpy.core.__file__)‘))/include
# PYTHON_LIB += $(shell brew --prefix numpy)/lib
# Uncomment to support layers written in Python (will link against Python libs)
WITH_PYTHON_LAYER := 1
# Whatever else you find you need goes here.
INCLUDE_DIRS := $(PYTHON_INCLUDE) /usr/local/include
LIBRARY_DIRS := $(PYTHON_LIB) /usr/local/lib /usr/lib
# If Homebrew is installed at a non standard location (for example your home directory) and you use it for general dependencies
INCLUDE_DIRS += /usr/local/hdf5/include
LIBRARY_DIRS += /usr/local/hdf5/lib
# Uncomment to use `pkg-config` to specify OpenCV library paths.
# (Usually not necessary -- OpenCV libraries are normally installed in one of the above $LIBRARY_DIRS.)
# USE_PKG_CONFIG := 1
# N.B. both build and distribute dirs are cleared on `make clean`
BUILD_DIR := build
DISTRIBUTE_DIR := distribute
# Uncomment for debugging. Does not work on OSX due to https://github.com/BVLC/caffe/issues/171
# DEBUG := 1
# The ID of the GPU that ‘make runtest‘ will use to run unit tests.
TEST_GPUID := 0
# enable pretty build (comment to see full commands)
Q ?= @
make -j8
结果如下图所示:
make pycaffe
结果如下图所示:

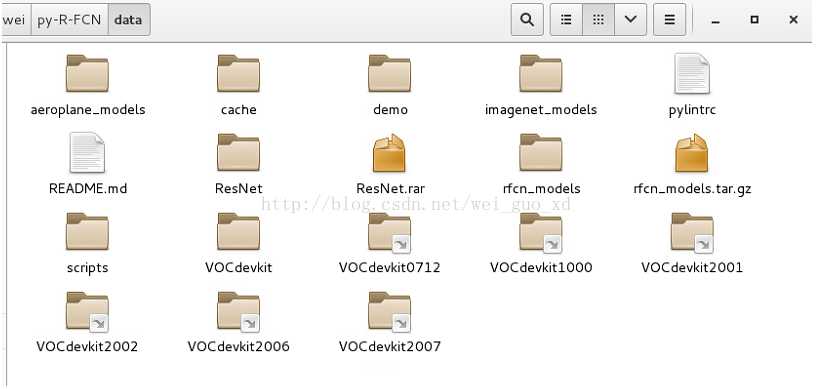
下载预训练模型(https://1drv.ms/u/s!AoN7vygOjLIQqUWHpY67oaC7mopf),放到data数据集下,如图所示(第二个是我自己训练的模型):
运行演示脚本:
./tools/demo_rfcn.py
结果如下图所示:

下载训练,测试,验证数据集:
wget http://host.robots.ox.ac.uk/pascal/VOC/voc2007/VOCtrainval_06-Nov-2007.tar
wget http://host.robots.ox.ac.uk/pascal/VOC/voc2007/VOCtest_06-Nov-2007.tar
wget http://host.robots.ox.ac.uk/pascal/VOC/voc2007/VOCdevkit_08-Jun-2007.tar
wget http://host.robots.ox.ac.uk/pascal/VOC/voc2012/VOCtrainval_11-May-2012.tar
解压到VOCdevkit文件夹中:
tar xvf VOCtrainval_06-Nov-2007.tar
tar xvf VOCtest_06-Nov-2007.tar
tar xvf VOCdevkit_08-Jun-2007.tar
tar xvf VOCtrainval_11-May-2012.tar
VOCdevkit文件夹的结构如下图所示:

由于py-faster-rcnn不支持多个训练集,我们创造一个新的文件夹叫做VOC0712,把VOC2007和VOC2012里的JPEGImage和Annonation融合到一个单独的文件夹JPEGImage和Annonation里,用下面的程序生成新的ImageSets文件夹:
%writetxt.m
file = dir(‘F:VOC0712Annotations*.xml‘);
len = length(file);
num_trainval=sort(randperm(len, floor(9*len/10)));%trainval集占所有数据的9/10,可以根据需要设置
num_train=sort(num_trainval(randperm(length(num_trainval), floor(5*length(num_trainval)/6))));%train集占trainval集的5/6,可以根据需要设置
num_val=setdiff(num_trainval,num_train);%trainval集剩下的作为val集
num_test=setdiff(1:len,num_trainval);%所有数据中剩下的作为test集
path = ‘F:VOC0712ImageSetsMain‘;
fid=fopen(strcat(path, ‘trainval.txt‘),‘a+‘);
for i=1:length(num_trainval)
s = sprintf(‘%s‘,file(num_trainval(i)).name);
fprintf(fid,[s(1:length(s)-4) ‘
‘]);
end
fclose(fid);
fid=fopen(strcat(path, ‘train.txt‘),‘a+‘);
for i=1:length(num_train)
s = sprintf(‘%s‘,file(num_train(i)).name);
fprintf(fid,[s(1:length(s)-4) ‘
‘]);
end
fclose(fid);
fid=fopen(strcat(path, ‘val.txt‘),‘a+‘);
for i=1:length(num_val)
s = sprintf(‘%s‘,file(num_val(i)).name);
fprintf(fid,[s(1:length(s)-4) ‘
‘]);
end
fclose(fid);
fid=fopen(strcat(path, ‘test.txt‘),‘a+‘);
for i=1:length(num_test)
s = sprintf(‘%s‘,file(num_test(i)).name);
if ~isempty(strfind(s,‘plain‘))
fprintf(fid,[s(1:length(s)-4) ‘
‘]);
end
end
fclose(fid);
为VOCdevkit创造新的超链接:VOCdevkit0712,如下图所示
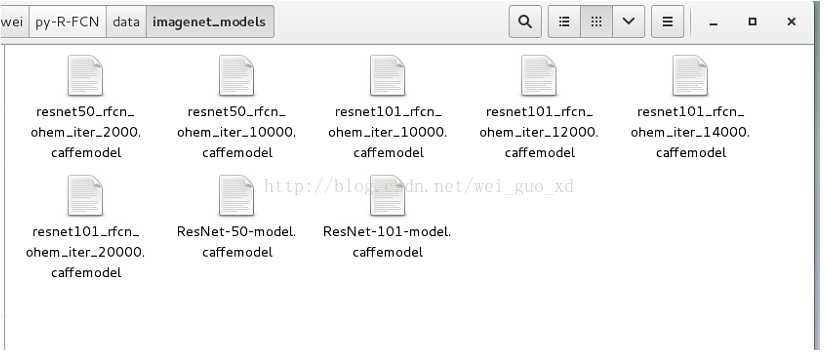
下载在ImageNet上预训练好的模型,放到./data/imagenet_models里,如下图所示:
下面开始用VOC0712训练:
experiments/scripts/rfcn_end2end.sh 使用联合近似训练
experiments/scripts/rfcn_end2end_ohem.sh 使用联合近似训练+OHEM
experiments/scripts/rfcn_alt_opt_5stage_ohem.sh 使用分布训练+OHEM
./experiments/scripts/rfcn_end2end[_ohem].sh [GPU_ID] [NET] [DATASET] [--set ...]
下面开始用py-rfcn来训练自己的数据集:(我的数据集是标准pascal voc数据集,名字叫做VOC5000)
首先修改网络模型:
1.修改/py-R-FCN/models/pascal_voc/ResNet-50/rfcn_end2end/class-aware/train_ohem.prototxt
name: "ResNet-50"
layer {
name: ‘input-data‘
type: ‘Python‘
top: ‘data‘
top: ‘im_info‘
top: ‘gt_boxes‘
python_param {
module: ‘roi_data_layer.layer‘
layer: ‘RoIDataLayer‘
param_str: "‘num_classes‘: 2" #改为你的数据集的类别数+1
}
}
layer {
name: ‘roi-data‘
type: ‘Python‘
bottom: ‘rpn_rois‘
bottom: ‘gt_boxes‘
top: ‘rois‘
top: ‘labels‘
top: ‘bbox_targets‘
top: ‘bbox_inside_weights‘
top: ‘bbox_outside_weights‘
python_param {
module: ‘rpn.proposal_target_layer‘
layer: ‘ProposalTargetLayer‘
param_str: "‘num_classes‘: 2"#改为你的数据集的类别数+1
}
}
layer {
bottom: "conv_new_1"
top: "rfcn_cls"
name: "rfcn_cls"
type: "Convolution"
convolution_param {
num_output: 98 #2*(7^2) cls_num*(score_maps_size^2)(类别数+1)*49
kernel_size: 1
pad: 0
weight_filler {
type: "gaussian"
std: 0.01
}
bias_filler {
type: "constant"
value: 0
}
}
param {
lr_mult: 1.0
}
param {
lr_mult: 2.0
}
}
layer {
bottom: "conv_new_1"
top: "rfcn_bbox"
name: "rfcn_bbox"
type: "Convolution"
convolution_param {
num_output: 392 #8*(7^2) cls_num*(score_maps_size^2)(类别数+1)*49*4
kernel_size: 1
pad: 0
weight_filler {
type: "gaussian"
std: 0.01
}
bias_filler {
type: "constant"
value: 0
}
}
param {
lr_mult: 1.0
}
param {
lr_mult: 2.0
}
}
layer {
bottom: "rfcn_cls"
bottom: "rois"
top: "psroipooled_cls_rois"
name: "psroipooled_cls_rois"
type: "PSROIPooling"
psroi_pooling_param {
spatial_scale: 0.0625
output_dim: 2 #类别数+1
group_size: 7
}
}
layer {
bottom: "rfcn_bbox"
bottom: "rois"
top: "psroipooled_loc_rois"
name: "psroipooled_loc_rois"
type: "PSROIPooling"
psroi_pooling_param {
spatial_scale: 0.0625
output_dim: 8#类别数*4
group_size: 7
}
}
2.修改/py-R-FCN/models/pascal_voc/ResNet-50/rfcn_end2end/class-aware/test.prototxt
layer {
bottom: "conv_new_1"
top: "rfcn_cls"
name: "rfcn_cls"
type: "Convolution"
convolution_param {
num_output: 98 #21*(7^2) cls_num*(score_maps_size^2)(类别数+1)*2
kernel_size: 1
pad: 0
weight_filler {
type: "gaussian"
std: 0.01
}
bias_filler {
type: "constant"
value: 0
}
}
param {
lr_mult: 1.0
}
param {
lr_mult: 2.0
}
}
layer {
bottom: "conv_new_1"
top: "rfcn_bbox"
name: "rfcn_bbox"
type: "Convolution"
convolution_param {
num_output: 392 #8*(7^2) cls_num*(score_maps_size^2)(类别数+1)*49*4
kernel_size: 1
pad: 0
weight_filler {
type: "gaussian"
std: 0.01
}
bias_filler {
type: "constant"
value: 0
}
}
param {
lr_mult: 1.0
}
param {
lr_mult: 2.0
}
}
layer {
bottom: "rfcn_cls"
bottom: "rois"
top: "psroipooled_cls_rois"
name: "psroipooled_cls_rois"
type: "PSROIPooling"
psroi_pooling_param {
spatial_scale: 0.0625
output_dim: 2 #(类别数+1)
group_size: 7
}
}
layer {
bottom: "rfcn_bbox"
bottom: "rois"
top: "psroipooled_loc_rois"
name: "psroipooled_loc_rois"
type: "PSROIPooling"
psroi_pooling_param {
spatial_scale: 0.0625
output_dim: 8 #(类别数+1)*4
group_size: 7
}
}
layer {
name: "cls_prob_reshape"
type: "Reshape"
bottom: "cls_prob_pre"
top: "cls_prob"
reshape_param {
shape {
dim: -1
dim: 2 #(类别数+1)
}
}
}
layer {
name: "bbox_pred_reshape"
type: "Reshape"
bottom: "bbox_pred_pre"
top: "bbox_pred"
reshape_param {
shape {
dim: -1
dim: 8 #(类别数+1)*4
}
}
}
3.修改/py-R-FCN/lib/datasets/pascal_voc.py
class pascal_voc(imdb):
def __init__(self, image_set, year, devkit_path=None):
imdb.__init__(self, ‘voc_‘ + year + ‘_‘ + image_set)
self._year = year
self._image_set = image_set
self._devkit_path = self._get_default_path() if devkit_path is None
else devkit_path
self._data_path = os.path.join(self._devkit_path, ‘VOC‘ + self._year)
self._classes = (‘__background__‘, # always index 0
‘aeroplane‘)
self._class_to_ind = dict(zip(self.classes, xrange(self.num_classes)))
self._image_ext = ‘.jpg‘
修改self._classes为你的类别加背景。
4./py-R-FCN/lib/datasets/factory.py修改
for year in [‘2007‘, ‘2012‘,‘2001‘,‘2002‘,‘2006‘,‘5000‘]:
for split in [‘train‘, ‘val‘, ‘trainval‘, ‘test‘]:
name = ‘voc_{}_{}‘.format(year, split)
__sets[name] = (lambda split=split, year=year: pascal_voc(split, year))
我的数据集叫:VOC5000,所以把5000加到年份当中。
5/py-R-FCN/experiments/scripts/rfcn_end2end_ohem.sh修改
case $DATASET in
pascal_voc)
TRAIN_IMDB="voc_5000_trainval"
TEST_IMDB="voc_5000_test"
PT_DIR="pascal_voc"
ITERS=4000
;;
把训练数据集和测试数据集改为你的数据集,迭代次数改为4000。
开始训练:./experiments/scripts/rfcn_end2end_ohem.sh 0 ResNet-50 pascal_voc
迭代4000次,取得了81.2%的精度。
以上是关于py-R-FCN的caffe配置(转)的主要内容,如果未能解决你的问题,请参考以下文章