Caffe源码理解1:Blob存储结构与设计
Posted shine-lee
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Caffe源码理解1:Blob存储结构与设计相关的知识,希望对你有一定的参考价值。
博客:blog.shinelee.me | 博客园 | CSDN
Blob作用
据Caffe官方描述:
A Blob is a wrapper over the actual data being processed and passed along by Caffe, and also under the hood provides synchronization capability between the CPU and the GPU. Mathematically, a blob is an N-dimensional array stored in a C-contiguous fashion.
Caffe stores and communicates data using blobs. Blobs provide a unified memory interface holding data; e.g., batches of images, model parameters, and derivatives for optimization.
Blobs conceal the computational and mental overhead of mixed CPU/GPU operation by synchronizing from the CPU host to the GPU device as needed. Memory on the host and device is allocated on demand (lazily) for efficient memory usage.
Blob是Caffe中的基础数据结构,主要作用如下:
- 存储和传输数据,对外提供统一的内存接口。在Caffe中,输入图像、每层的权重和反向传播时的梯度、每层的输入和输出等都以
Blob形式管理 - 隐藏CPU和GPU之间数据同步的细节(通过
SyncedMemory实现),用户使用时不需要自己管理CPU和GPU间的数据同步
在逻辑上,Blob是个(N_d)维张量。当(N_d=4)时,Blob的shape定义为(N * C * H * W),即(Num * Channel * Height * Width),可以表示输入图像Batch、卷积层的kernel参数、卷积层的输入输出map等;当(N_d=2)时,可以表示全连接层的权重,(N_{out} * N_{in});当(N_d=1)时,可以表示卷积层和全连接层的bias参数。
具体地,
- (N_d=4),
Blob表示输入图像时,(N)为当前批次的图片数量即MiniBatchNum,(C)为图像的通道数,RGB图(C=3),(H)和(W)为图像的高和宽。 - (N_d=4),
Blob表示卷积层的输入输出时,(N=1),(C)为特征图的数量,(H)和(W)为特征图的高和宽。 - (N_d=4),
Blob表示卷积层kernel参数时,(N)为当前层输出特征图的数量,其与卷积核数量相同,(C)为当前层输入特征图的数量,其与一个卷积核的层数相同,(H)和(W)为卷积核的高和宽,每个卷积是三维的即(C*H*W)。 - (N_d=2),
Blob表示全连接层的权重时,shape为(N_{out} * N_{in})的二维矩阵,(N_{out})为输出数量,(N_{in})为输入数量。 - (N_d=1),
Blob为长度为(N)的向量,表示卷积层bias参数时,(N)为卷积核数量(与输出特征图数量相同),表示全连接层bias参数时,(N)为输出数量(与上面的(N_{out})相同)。
主要成员变量
shared_ptr<SyncedMemory> data_; // 数据,存储图像、参数、输入输出等
shared_ptr<SyncedMemory> diff_; // 反向传播时的梯度,训练阶段update时参数的更新量
shared_ptr<SyncedMemory> shape_data_; // GPU shape,与下面的shape是相同的
vector<int> shape_; // shape,data和diff相同
int count_; // 张量中的元素数量,比如 N*C*H*W
int capacity_; // 容量,当前分配内存的大小,当reshape时,可能需要扩容Blob存储结构
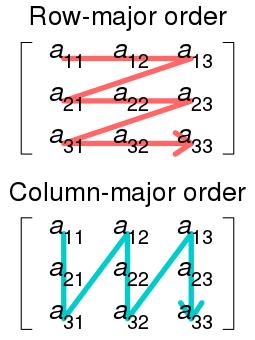
Blob的data_和diff_对应的数据区,在内存中均以行有先的方式存储(C语言风格)。行优先和列优先的存储方式如下图所示,9个数连续存储,表示同一个矩阵,但是存储顺序不同,图片来自WIKI:
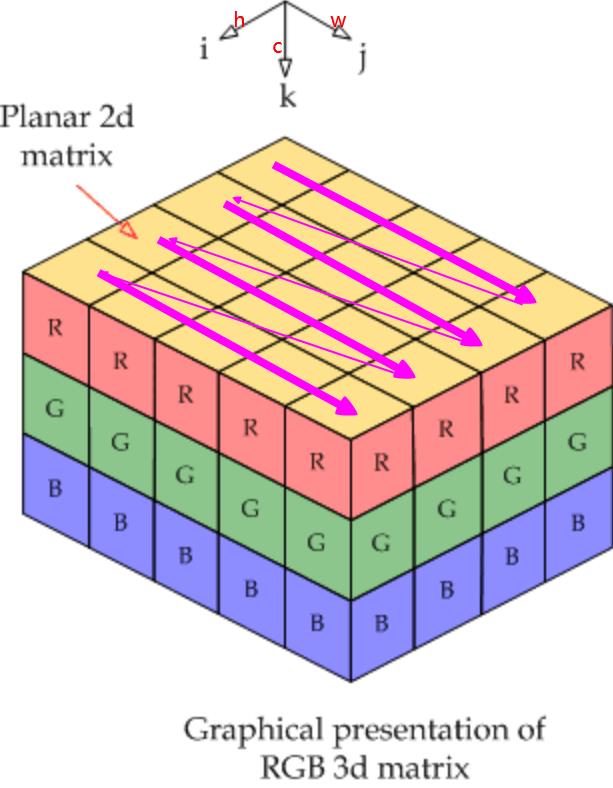
当输入图像为1张RGB图时,shape为(1*3*4*5),其存储顺序如下图所示,图片素材来自链接。channel维上,0为R,1为G、2为B,先在R上行有先存储,再在G上行有先存储,最后在B上行有先存储。这里仅作示意,在caffe中实际存储顺序为BGR。
当(N=4)时,(Num * Channel * Height * Width),Blob在(Width)维上连续存储,如下图所示:
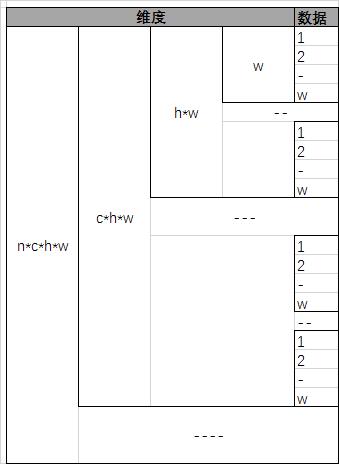
理解了上图,再理解多维Blob的拼接、裁剪等操作就很容易了。
通过Blob的offset成员函数可以获得((n, c, h, w))处的偏移量,偏移的计算方式与行优先存储是一致的,代码如下:
inline int offset(const int n, const int c = 0, const int h = 0,
const int w = 0) const {
CHECK_GE(n, 0);
CHECK_LE(n, num());
CHECK_GE(channels(), 0);
CHECK_LE(c, channels());
CHECK_GE(height(), 0);
CHECK_LE(h, height());
CHECK_GE(width(), 0);
CHECK_LE(w, width());
return ((n * channels() + c) * height() + h) * width() + w;
}CPU与GPU间的数据传递
const Dtype* cpu_data() const; // 不可修改数据,return (const Dtype*)data_->cpu_data();
const Dtype* gpu_data() const; // return (const Dtype*)data_->gpu_data();
Dtype* mutable_cpu_data(); // 可修改数据,return static_cast<Dtype*>(data_->mutable_cpu_data());
Dtype* mutable_gpu_data(); // static_cast<Dtype*>(data_->mutable_gpu_data());Caffe中通过上述方式来获取CPU和GPU上的数据区指针,在调用函数时,SyncedMemory会自行判断是否需要同步数据(具体是如何判断的,在讲SyncedMemory时再详细说明),当访问CPU(GPU)侧数据时,如果GPU(CPU)侧数据(可能)更新过,则将数据同步至CPU(GPU)。可参考下面示例代码来理解何时会发生数据同步,示例代码来自Caffe官网。
// Assuming that data are on the CPU initially, and we have a blob.
const Dtype* foo;
Dtype* bar;
foo = blob.gpu_data(); // data copied cpu->gpu.
foo = blob.cpu_data(); // no data copied since both have up-to-date contents.
bar = blob.mutable_gpu_data(); // no data copied.
// ... some operations ...
bar = blob.mutable_gpu_data(); // no data copied when we are still on GPU.
foo = blob.cpu_data(); // data copied gpu->cpu, since the gpu side has modified the data
foo = blob.gpu_data(); // no data copied since both have up-to-date contents
bar = blob.mutable_cpu_data(); // still no data copied.
bar = blob.mutable_gpu_data(); // data copied cpu->gpu.
bar = blob.mutable_cpu_data(); // data copied gpu->cpu.只要调用了mutable函数,即便没有实际修改数据,再调用另一侧的mutable函数,也会发生数据同步。因此,在明确不修改数据时,尽量调用const函数,只有在操纵数据时才调用mutable函数。
主要成员函数
Blob的主要成员函数有:
- 基本函数,包括构造函数、set和get类函数、逻辑判断等
Reshape函数,用于设置Blob的shape,分配内存Update函数,用于在网络训练时更新参数使用,(data = data - diff)Blob运算函数,用于切片统计、求L1范数、L2范数、数乘等- 辅助函数,proto导入导出等
下面重点介绍其中主要的成员函数。
template <typename Dtype>
class Blob {
public:
Blob()
: data_(), diff_(), count_(0), capacity_(0) {}
/// @brief Deprecated; use <code>Blob(const vector<int>& shape)</code>.
explicit Blob(const int num, const int channels, const int height,
const int width);
explicit Blob(const vector<int>& shape);
// ......
}在Blob的构造函数中,会调用Reshape函数,给shape成员变量赋值以及分配初始内存。在Layer::Reshape或者Layer::Forward时,也会调用Reshape函数来设置输出Blob的维度,如果reshape了整个网络的输入Blob,则需要调用Net::Forward或者Net::Reshape来重新确定每一层相关Blob的shape(从bottom到top逐层推算得出)。当Blob size发生改变时,只有在内存不够才会再分配内存,具体代码如下
template <typename Dtype>
bool Blob<Dtype>::Reshape(const vector<int>& shape) {
CHECK_LE(shape.size(), kMaxBlobAxes);
count_ = 1;
shape_.resize(shape.size());
if (!shape_data_ || shape_data_->size() < shape.size() * sizeof(int)) {
shape_data_.reset(new SyncedMemory(shape.size() * sizeof(int)));
}
int* shape_data = static_cast<int*>(shape_data_->mutable_cpu_data());
for (int i = 0; i < shape.size(); ++i) {
CHECK_GE(shape[i], 0);
if (count_ != 0) {
CHECK_LE(shape[i], INT_MAX / count_) << "blob size exceeds INT_MAX";
}
count_ *= shape[i];
shape_[i] = shape[i];
shape_data[i] = shape[i];
}
// 不够时分配内存,原内存会释放(shared_ptr)
if (count_ > capacity_) {
capacity_ = count_;
data_.reset(new SyncedMemory(capacity_ * sizeof(Dtype)));
diff_.reset(new SyncedMemory(capacity_ * sizeof(Dtype)));
return true;
}
else {
return false;
}
}在网络训练阶段,根据损失函数以及反向传播得到的梯度,获得每层参数的更新量diff_,会调用Update函数来更新参数,如下
template <typename Dtype>
void Blob<Dtype>::Update() {
// We will perform update based on where the data is located.
switch (data_->head()) {
case SyncedMemory::HEAD_AT_CPU:
// perform computation on CPU
// data = data - diff, axpy: y = ax + y
caffe_axpy<Dtype>(count_, Dtype(-1),
static_cast<const Dtype*>(diff_->cpu_data()),
static_cast<Dtype*>(data_->mutable_cpu_data()));
break;
case SyncedMemory::HEAD_AT_GPU:
case SyncedMemory::SYNCED:
#ifndef CPU_ONLY
// perform computation on GPU
caffe_gpu_axpy<Dtype>(count_, Dtype(-1),
static_cast<const Dtype*>(diff_->gpu_data()),
static_cast<Dtype*>(data_->mutable_gpu_data()));
#else
NO_GPU;
#endif
break;
default:
LOG(FATAL) << "Syncedmem not initialized.";
}
}
值得一提的是,Blob维度索引支持负数,-1表示最后一个维度,与Python相同,实现代码如下,在需要访问某个维度时,先使用CanonicalAxisIndex获得真正维度,比如CanonicalAxisIndex(-1)。
// axis_index the axis index.
// If 0 <= index < num_axes(), return index.
// If -num_axes <= index <= -1, return (num_axes() - (-index))
inline int CanonicalAxisIndex(int axis_index) const {
CHECK_GE(axis_index, -num_axes())
<< "axis " << axis_index << " out of range for " << num_axes()
<< "-D Blob with shape " << shape_string();
CHECK_LT(axis_index, num_axes())
<< "axis " << axis_index << " out of range for " << num_axes()
<< "-D Blob with shape " << shape_string();
if (axis_index < 0) {
return axis_index + num_axes();
}
return axis_index;
}其他函数,只取代表。
// set get
// 省略基本的set和get函数,如上面提到的const和mutable函数
// 返回(n, c, h, w)处的数据,return cpu_data()[offset(n, c, h, w)]
inline Dtype data_at(const int n, const int c, const int h, const int w) const;
inline Dtype diff_at(const int n, const int c, const int h, const int w) const;
void ShareData(const Blob& other); // 与另一Blob共享data,类似浅拷贝
void ShareDiff(const Blob& other); // 与另一Blob共享diff
// 从另一Blob拷贝,类似深拷贝
void Blob<Dtype>::CopyFrom(const Blob& source, bool copy_diff, bool reshape);
// 切片元素数量统计,count *= shape(i)
inline int count(int start_axis, int end_axis) const;
// proto序列化与反序列化
void FromProto(const BlobProto& proto, bool reshape = true); // 从proto导入
void ToProto(BlobProto* proto, bool write_diff = false) const; // 导出为proto
// 运算
Dtype asum_data() const; // data L1 norm
Dtype asum_diff() const; // diff L1 norm
Dtype sumsq_data() const; // data L2 norm
Dtype sumsq_diff() const; // diff L2 norm
void scale_data(Dtype scale_factor); // data 数乘,in place
void scale_diff(Dtype scale_factor); // diff 数乘,in place
// 逻辑判断
bool ShapeEquals(const BlobProto& other); // 判断shape是否相同以上。
参考
- Blobs, Layers, and Nets: anatomy of a Caffe model
- Row- and column-major order
- Caffe: a fast open framework for deep learning
以上是关于Caffe源码理解1:Blob存储结构与设计的主要内容,如果未能解决你的问题,请参考以下文章