共线方程旋转矩阵转移向量等摄影测量知识综合
Posted zf-blog
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了共线方程旋转矩阵转移向量等摄影测量知识综合相关的知识,希望对你有一定的参考价值。
参考链接: https://wenku.baidu.com/view/606da2a1240c844769eaee7e.html?qq-pf-to=pcqq.group
https://blog.csdn.net/fireflychh/article/details/82352710
先验知识:
(1)内方位元素:表示摄影中心与像片之间相关位置(姿态)的参数,共三个参数:
1)摄影中心s到像片的垂距;
2)像主点O在框标坐标系中的坐标(x0 , y0);
外方位元素:摄影中心在物方坐标系中的三维坐标和姿态(共6个参数);
(2)四个坐标系:
1)框标坐标系:二维像平面坐标系;
2)像空间坐标系:Z轴垂直于二维像平面,X、Y轴平行于框标坐标系的X、Y轴;
3)像空间辅助坐标系(像辅坐标系);
4)大地坐标系,也称物方坐标系:该坐标系与上面的像辅坐标系X、Y、Z轴均平行,只是原点位置不同,上者的原点在摄影中心(相机中心),该坐标系的原点在物体中心;
示意图如下:
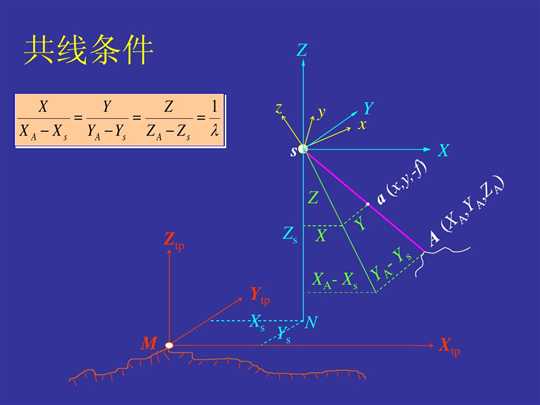
如上图:(Xtp , Ytp , Ztp)是物方坐标系,(X , Y , Z)是像辅坐标系,(x , y , z)是像空间坐标系,s是相机中心,a是物体A在像平面上的成像点;
1)(XA , YA , ZA):A点物方坐标;
2)(XS , YS , ZS):S点物方坐标;
3)(x , y , -f):a点像空坐标;
4)(X , Y , Z):a点像辅坐标;
另外,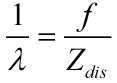 ,其中
,其中 为相机中心到物体中心的距离,f是相机的焦距;
为相机中心到物体中心的距离,f是相机的焦距;
现在我们先来证明共线方程:
在证明共线方程之前,我们需要县引入旋转矩阵(rotation matrix)这个概念,可以参考 https://blog.csdn.net/fireflychh/article/details/82352710
详细解释如下:
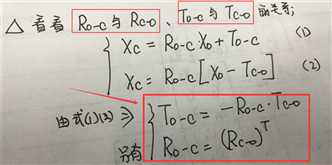
然后我们也顺便引入translation vector的概念(即转移向量),我们令:
1)To-c:物体中心在像空坐标系中的坐标;
2)Tc-o:摄影中心(相机中心)在物方坐标系中的坐标;
然后来证明共线方程:

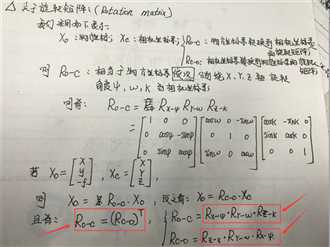
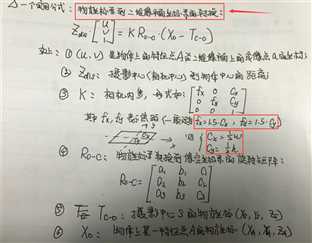
下面引入一个比较实用的公式,可以实现从物方坐标系到二维像平面坐标系的转换!如下:

还有几点补充的:
(1)opencv中的两个函数:
1)cv::projectPoints(object_points2, rotation_matrix, translate_T, intrinsic_matrix, distortion_coeffs, pts_proj);
2)solvePnP()
第一个函数是给定rotation_matrix和translate_T,可以计算出物方坐标投影到对应的像坐标,第二个函数是计算出rotation_matrix和translate_T,它们均为To-c , Ro-c;
以上是关于共线方程旋转矩阵转移向量等摄影测量知识综合的主要内容,如果未能解决你的问题,请参考以下文章