Vision Transformer(ViT)
Posted zhiyong_will
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Vision Transformer(ViT)相关的知识,希望对你有一定的参考价值。
1. 概述
Transformer[1]是Google在2017年提出的一种Seq2Seq结构的语言模型,在Transformer中首次使用Self-Atttention机制完全代替了基于RNN的模型结构,使得模型可以并行化训练,同时解决了在基于RNN模型中出现了长距离依赖问题,因为在Self-Attention中能够对全局的信息建模。
Transformer结构是一个标准的Seq2Seq结构,包含了Encoder和Decoder两个部分。其中基于Encoder的Bert[2]模型和基于Decoder的GPT[3]模型刷新了NLP中多个任务的记录,在NLP多种应用中取得了巨大的成功。以BERT模型为例,在BERT模型中,首先在大规模数据上利用无监督学习训练语言模型,对于具体的下游任务,如文本分类,利用预训练模型在下游数据上Fine-tuning。
基于Transformer框架的模型在NLP领域大获成功,而在CV领域还是基于CNN模型的情况下,能否将Transformer引入到CV中呢?ViT(Vision Transformer)[4]作为一种尝试,希望能够通过尽可能少的模型改动,实现Transformer在CV中的应用。
2. 算法原理
2.1. Transformer的基本原理
Transformer框架是一个典型的Seq2Seq结构,包括了Encoder和Decoder两个部分,其框架结构如下图所示:

在Transformer框架结构中,Encoder部分如上图的左半部分,Decoder部分如上图的右半部分。由于在ViT中是以Encoder部分为主要部分,同时,BERT模型也是以Transformer中Encoder为原型的模型,因此在这里对Bert模型做简单介绍,对于完整的Transformer框架的介绍可见参考文献[5]。BERT是基于上下文的预训练模型,BERT模型的训练分为两步:第一,pre-training;第二,fine-tuning。其中,在pre-training阶段,首先会通过大量的文本对BERT模型进行预训练,然而,标注样本是非常珍贵的,在BERT中则是选用大量的未标注样本来预训练BERT模型。在fine-tuning阶段,会针对不同的下游任务适当改造模型结构,同时,通过具体任务的样本,重新调整模型中的参数。
2.1.1. BERT模型的网络结构
BERT模型是Transformer结构的Encoder部分,其基本的网络结构如下图所示:

这个结构与Transformer中的Encoder结构是完全一致的。
2.1.2. BERT模型的输入Embedding
为了使得BERT能够适配更多的应用,模型在pre-training阶段,使用了Masked Language Model(MLM)和Next Sentence Prediction(NSP)两种任务作为模型预训练的任务,其中MLM可以学习到词的Embedding,NSP可以学习到句子的Embedding。在Transformer中,输入中会将词向量与位置向量相加,而在BERT中,为了能适配上述的两个任务,即MLM和NSP,这里的Embedding包含了三种Embedding的和,如下图所示:

其中,Token Embeddings是词向量,第一个单词是CLS标志,可以用于之后的分类任,Segment Embeddings用来区别两种句子,这是在预训练阶段,针对NSP任务的输入,Position Embeddings是位置向量,但是和Transformer中不一样,与词向量一样,是通过学习出来的。此处包含了两种标记,一个是[CLS],可以理解为整个输入特征的向量表示;另一个是[SEP],用于区分不同的句子。
2.1.3. 重要的Multi-Head Attention
Multi-Head Attention结构是所以基于Transformer框架模型的灵魂,Multi-Head Attention结构是由多个Scaled Dot-Product Attention模块组合而成,如下图所示:
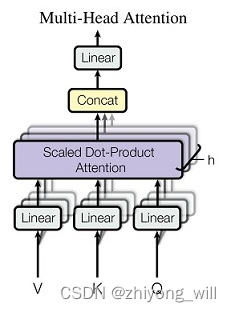
其过程可以表示为:
M u l t i H e a d ( Q , K , V ) = C o n c a t ( h e a d 1 , ⋯ , h e a d h ) W o MultiHead\\left ( Q,K,V \\right ) =Concat\\left ( head_1,\\cdots, head_h \\right ) W^o MultiHead(Q,K,V)=Concat(head1,⋯,headh)Wo
其中,每一个 h e a d i head_i headi就是一个Scaled Dot-Product Attention。Multi-head Attention相当于多个不同的Scaled Dot-Product Attention的集成,引入Multi-head Attention可以扩大模型的表征能力,同时这里面的 h h h个Scaled Dot-Product Attention模块是可以并行的,没有层与层之间的依赖,相比于RNN,可以提升效率。而Scaled Dot-Product Attention的计算方法为:
A t t e n t i o n ( Q , K , V ) = s o f t m a x ( Q K T d k ) V Attention\\left ( Q,K,V \\right )=softmax\\left ( \\fracQK^T\\sqrtd_k \\right )V Attention(Q,K,V)=softmax(dkQKT)V
其中 1 d k \\frac1\\sqrtd_k dk1最主要的目的是对点积缩放。计算过程可由下图表示:

2.1.4. 下游任务的fine-tuning
在预训练阶段,BERT采用了Masked Language Model和Next Sentence Prediction两个训练任务作为其语言模型的训练,其中,Masked Language Model的原理是随机将一些词替换成[MASK],在训练的过程中,通过上下文信息来预测被mask的词;Next Sentence Prediction的目的是让模型理解两个橘子之间的关系,训练的输入是两个句子,BERT模型需要判断后一个句子是不是前一个句子的下一句。这两个任务最大的特点就是可以无监督学习,这样就可以避免模型对大规模标注数据依赖的问题。
在预训练模型完成后,就可以在具体的下游任务中应用BERT模型。这里以文本分类为例,句子对的分类任务,即输入是两个句子,输入如下图所示:

输出是BERT的第一个[CLS]的隐含层向量
C
∈
R
H
C\\in \\mathbbR^H
C∈RH,在Fine-Tune阶段,加上一个权重矩阵
W
∈
R
K
×
H
W\\in \\mathbbR^K\\times H
W∈RK×H,其中,
K
K
K为分类的类别数。最终通过Softmax函数得到最终的输出概率。
2.2. ViT的基本原理
ViT模型是希望能够尽可能少对Transformer模型修改,并将Transformer应用于图像分类任务的模型。ViT模型也是基于Transformer的Encoder部分,这一点与BERT较为相似,同时对Encoder部分尽可能少的修改。
2.2.1. ViT的网络结构
ViT的网络结构如下图所示:

ViT模型的网络结构如上图的右半部分所示,与原始的Transformer中的Encoder不同的是Norm所在的位置不同,类似BERT模型中[class]标记位的设置,ViT在Transformer输入序列前增加了一个额外可学习的[class]标记位,并且该位置的Transformer Encoder输出作为图像特征。
Vision Transformer(ViT)将输入图片拆分成
16
×
16
16\\times 16
16×16个patches,每个patch做一次线性变换降维同时嵌入位置信息,然后送入Transformer。类似BERT[CLS]标记位的设计,在ViT中,在输入序列前增加了一个额外可学习的[class]标记位,并将其最终的输出作为图像特征,最后利用MLP做最后的分类,如上图中的左半部分所示,其中,[class]标记位为上图中Transformer Encoder的0*。那么现在的问题就是两个部分,第一,如何将图像转换成一维的序列数据,因为BERT处理的文本数据是一维的序列数据;第二,如何增加位置信息,因为在Transformer中是需要对位置信息编码的,在BERT中是通过学习出来,而在Transformer中是利用sin和cos这两个公式生成出来。
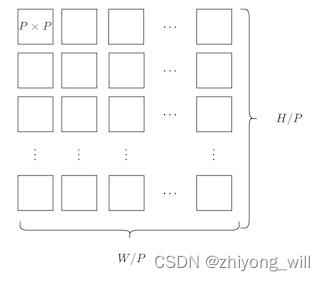
2.2.2. 图像到一维序列数据的转换
对于 x ∈ R H × W × C \\mathbfx\\in \\mathbbR^H\\times W\\times C x∈RH×W×C的图像,首先需要将其变成 x p ∈ R N × ( P 2 ⋅ C ) \\mathbfx_p\\in \\mathbbR^N\\times \\left (P^2\\cdot C \\right ) xp∈RN×(P2⋅C)的2D的patch的序列,这里面, ( H , W ) \\left ( H,W \\right ) (H,W)表示的是原图的分辨率, C C C表示的通道(channel)的数目, ( P , P ) \\left ( P,P \\right ) (P,P)表示的是每个patch的分辨率, N = H W / p 2 N=HW/p^2 N=HW/p2表示的是patch的个数,对于一个通道,上述的这个过程可以如下图所示:
假设输入图片大小是 256 × 256 256\\times 256 256×256,每个patch的大小为 32 × 32 32\\times 32 32×32,则最后的总的patch个数为64。对于每个patch,我们还需要将其转换成embeding的表示,ViT中使用到了线性变换,即:
z 0 = [ x c l a s s ; x p 1 E ; x p 2 E ; ⋯ ; x p N E ] + E p o s \\mathbfz_0=\\left [ \\mathbfx_class;\\mathbfx_p^1\\mathbfE;\\mathbfx_p^2\\mathbfE;\\cdots ;\\mathbfx_p^N\\mathbfE \\right ]+\\mathbfE_pos z0=[xclass;xp1E;xp2E;⋯;xpNE]+Epos
其中, E ∈ R ( P 2 ⋅ C ) × D \\mathbfE\\in \\mathbbR^\\left ( P^2\\cdot C \\right )\\times D E∈R(P2⋅C)×D, E p o s ∈ R ( N + 1 ) × D \\mathbfE_pos\\in \\mathbbR^\\left ( N+1 \\right )\\times D Epos∈R(N+1)×D。首先对于第 i i i个patch,我们看到 x p i E \\mathbfx_p^i\\mathbfE xpiE是将patch转换成 D D D维的向量,具体过程如下:
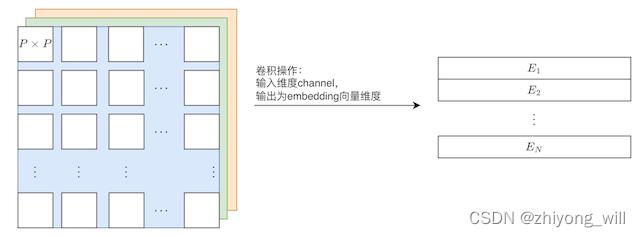
这里的卷积操作中卷积核大小为 P × P P\\times P P×P,步长为 P P P。参考文献[6]给出了较为容易理解的代码,注释的代码如下:
class PatchEmbed(nn.Module):
"""
2D Image to Patch Embedding
"""
def __init__(self, img_size=224, patch_size=16, in_c=3, embed_dim=768, norm_layer=None):
super().__init__()
img_size = (img_size, img_size) # 图片原始大小
patch_size = (patch_size, patch_size) # 每个patch的大小
self.img_size = img_size
self.patch_size = patch_size
self.grid_size = (img_size[0] // patch_size[0], img_size[1] // patch_size[1]) # 拆分成每个patch后,每个维度的patch个数
self.num_patches = self.grid_size[0] * self.grid_size[1] # 总共的patch个数
self.proj = nn.Conv2d(in_c, embed_dim, kernel_size=patch_size, stride=patch_size) # 对每个patch做线性变换
self.norm = norm_layer(embed_dim) if norm_layer else nn.Identity() # 归一化
def forward(self, x):
B, C, H, W = x.shape
assert H == self.img_size[0] and W == self.img_size[1], \\
f"Input image size (H*W) doesn't match model (self.img_size[0]*self.img_size[1])."
# flatten: [B, C, H, W] -> [B, C, HW]
# transpose: [B, C, HW] -> [B, HW, C]
x = self.proj(x).flatten(2).transpose(1, 2) # 这里C即为向量的维度,HW表示的是patch的个数
x = self.norm(x)
return x
除此之外还有两个向量,分别为 x c l a s s \\mathbfx_class xclass和 E p o s \\mathbfE_pos E以上是关于Vision Transformer(ViT)的主要内容,如果未能解决你的问题,请参考以下文章