常见的5中聚类算法
Posted wingpig
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了常见的5中聚类算法相关的知识,希望对你有一定的参考价值。
聚类是机器学习中一种方法,常用用于处理数据分组的问题。给定一组数据,利用聚类算法将每一个数据点分批到一个特定的组。这就要求对于同一组的数据点,应该具有相同的性质(特征);对于不同组的数据点,在性质(特征)上应该有显著的区别。聚类算法数据无监督学习(unsupervised learning),常用于处理静态数据的分类问题。
K-Means
K-Means算法是一种简单的迭代性聚类算法,采用距离作为相似性度量指标。从而将给定的数据集分为K个类,每个类的中心是由该类中所有点的均值得到,每个类均由聚类中心进行表示。
对给定的一个包含n个点的d维数据集X以及分类的个数K,选取欧式距离作为相似度指标。距离的目标是使各类的聚类平方和最小,即最小化度量函数即损失函数为:
[J=sum_{k=1}^{K}{sum_{j=1}^{n}{(||x_i-u_k||^2)}}]
分类过程
- 确定聚类个数,即设定K值;
- 从数据集中随机选择K个点作为初始类中心 ;
- 对于数据集中的每一个样本点,分别计算其到各个类中心的距离,并选择距离最近的类中心作为该样本点的分组 ;
- 执行完上一步骤后。对于每一个类,分别重新聚类中心,不断迭代,知道聚类中心收敛(不再移动)。聚类中心重新计算的方法是,计算该类的中点(几何重心、均值)。
K-Means算法具有较高的聚类速度,其复杂度是(O(n))。但是该方法也具有明显的缺点:1、需要制定K值;2、其随机选择初始类重心,因此对于同一组数据可能会得到不同的分类模型。
K-Medians是一种和K-Means相似的迭代性聚类算法,只不过其在重新计算聚类中心时进行了改变,将均值计算改为中值计算。因此该方法相对于K-Means对异常值更鲁棒,但是其代价却是计算复杂度的增加,因为每个迭代过程中都需要对每类中的数据点进行排队找中值。
MeanShift
MeanShift是一个基于滑动窗口和质心的聚类算法,其目的是找出数据集中密度最大的区域。基于质心的意思是定位每一个组/类的质心,通过滑动窗口的方式不断更新质心的候选点。
对给定的d维空间(R^d)上的n个样本点,在空间中任选一点x,则MeanShift向量的表达形式为:[M_h=frac{1}{K}sum_{{x_i}in{S_h}}{(x_i-x)}] (S_k)是满足以h为半径的高维球区域,满足一下关系的y的集合:[S_k(x)={y:(y-x_i)^T(y-x_i)<h^2}]k表示在n个(x_i)点中,落在高维球区域(S_k)的内的点的个数。
直白来说,是以x为中心,画一个半径为h的高维球(当是二维空间时就是圆,当时三维空间时就是球,当是多维空间时就是多维球),假设落在高维球内的点有k个,则分别将圆心(x)和其他点进行连接,构成k个向量,然后再将k个向量进行相加,最后得到的向量和就是MeanShift。
分类过程
- 对于数据集,首先指定半径h并随机初始化一个中心点x,即得到第一个高维球区域。MeanShift是一种爬山算法,它在每次迭代中都将核移动至具有较高密度的区域,直至收敛。
- 对上述高维球区域,计算MeanShift,然后移动中心点,得到一个新的高维球区域。
- 不断地移动中心点,可以使高维球区域一直向具有更高密度区域的方向进行移动,直至没有移动方向(即)。
- 通过设置多个高维球区域,不断地执行1-3的步骤,直至所有的高维球都收敛。当多个高维球发生重叠时,包含最多点的高维球区域被保留。最后数据集则根据高维球区域分类完毕。
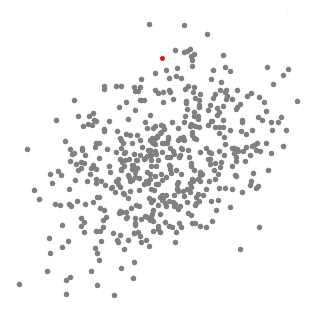
单个高维球区域
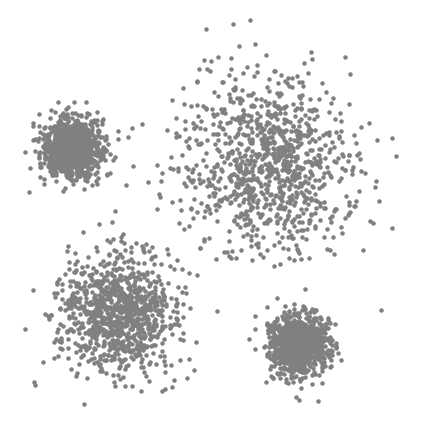
多个高维球区域
Density-Based Spatial Clustering of Applications with Noise(DBSCAN)
DBSCAN(具有噪声的密度聚类算法)是一种特别的聚类算法,相比于只用于凸优化样本集中的K-Means算法,DBSCAN既可以用于凸优化样本集也可以用于非凸优化样本集。DBCAN是一种基于密度的聚类算法,该算法假设样本的类别可以通过样本分布的紧密程度进行区分。同一类别的样本,他们之间是紧密相连的;不同类别的样本则分布的相对较远。通过将紧密相连的样本划为一类,这样就得到了一个聚类类别。通过将所有各组紧密相连的样本划为各个不同的类别,则我们就得到了最终的所有聚类类别结果。
DBSCAN是基于一组邻域来描述样本集的紧密程度,参数((varepsilon, minPts))来描述邻域的样本分布密度,其中(varepsilon)表示某一样本的邻域距离的阈值,minPts表示某一样本的距离为(varepsilon)的邻域中样本个数的阈值。
假设样本集是(D=(x_1,x_2,,,x_m)),则DBSCAN具体的密度描述定义如下:
- (varepsilon)-邻域:对于(x_jepsilon{D}),其(varepsilon)邻域是指,样本集D内所有与(x_j)的距离不大于(varepsilon)的子样本集,即[N_varepsilon{(x_i)}={{x_iepsilon{D}|distance(x_i,x_j)< varepsilon }}]这个子样本集的个数是(|N_varepsilon{(x_i)}|);
- 核心对象:对任意一个样本(x_j),如果其(varepsilon)-邻域包含的样本个数(|N_varepsilon{(x_i)}|)大于minPts,则称该样本点(x_j)是核心对象;
- 密度直达:如果(x_i)位于(x_j)的(varepsilon)邻域内,且(x_j)是核心对象,则称(x_i)由(x_j)密度直达。注意,反之不成立,不能说是(x_j)由(x_i)密度直达,除非(x_i)也是核心对象;
- 密度可达:对于(x_i)和(x_j),存在核心对象序列(P={p_1,p_2,,,p_T}),满足(p_{t+1})由(p_t)可达,如果(x_i=p_1,x_j=p_T),则称(x_j)由(x_i)密度可达,即说明密度直达具有传递性;
密度相连:对于(x_i)和(x_j),存在一个核心对象(x_k),如果(x_i)由(x_k)密度可达且(x_j)由(x_k)密度可达,则称(x_i)和(x_j)密度相连;
Exception-Maximization(EM) Clustering using Gaussian Mixture Models(GMM)
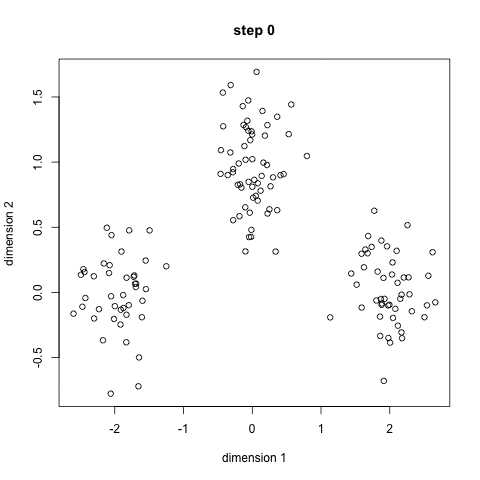
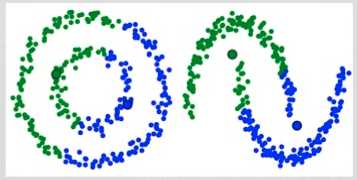
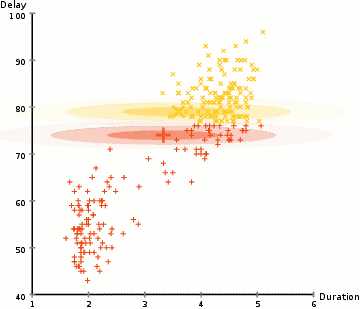
K-Means主要的缺点是其使用均值作为聚类中心,在某些聚类情况下无法有效区分聚类中心。例如下图的左侧图像,我们肉眼可以很容易的看出整个图像分为两类:左侧绿色点,右侧蓝色点。然而在使用K-Means算法时,却无法有效区分分聚类中心,因为采用均值计算聚类中心,则聚类中心大约都处在圆心部位。
Gaussian Mixture Models(GMMs)相比于K-Means具有更高的灵活性,使用GMMS的前提是假设数据点是服从高斯分布的。因此我们使用两个参数来对聚类进行描述:均值和标准偏差。例如在二位空间中我们可以表示任何形式的椭圆,因为我们具有中心点和x,y轴的标准差。
为找到每个类的高斯参数,我们采用期望最大策略(Expectation-Maximization,EM)。GMMs聚类的步骤如下:
- 像K-Means一样,首先需要制定聚类的个数,然后再为每个类随机生成高斯分布参数;
- 给定每个集群的高斯分布参数,然后计算每个点属于特定集群的概率。离高斯中心最近点越有可能属于该集群。因为在高斯分布中,我们假设大多数数据点靠近集群中心。
- 基于上面的概率,重新计算高斯分布参数,以便使集群内所有点的概率和最大。在计算高斯分布参数时,采用数据点位置的加权方式计算参数,权重就是数据点属于特定集合的概率。
- 重复进行上述第2、3步,直至收敛,既在每次迭代中参数个改变小于某个阈值。
GMMs具有两个关键的优势:1、对于cluster covariance(聚类协方差)情况下,相比于K-Means更为灵活。因为通过使用标准偏差参数可以表示任何形式的椭圆,而K-Means只能表示圆,当然K-Means可以看做是GMMs的一种特例,每个群在各个维度上的协方差均为0。2、因为GMMs采用概率的方式,因此可解决一个点属于多簇的情况。例如一个点在两个簇的交叉点上,可以描述为属于簇1的概率是X,属于簇2的概率是Y。
Agglomerative Hierarchy Clustering(AHC)
层次聚类根据聚类的方式分为两类:自上而下和自下而上。自下而上的聚类算法,起初假设每个样本都是一个单独的类别,然后相继的合并类别,直到最后只有一个类别。最终将得到一个类似于树的结构,树的根是一个类别,其包含所有的样本点,而叶子则是只有一个样本的集群。
聚类过程如下:
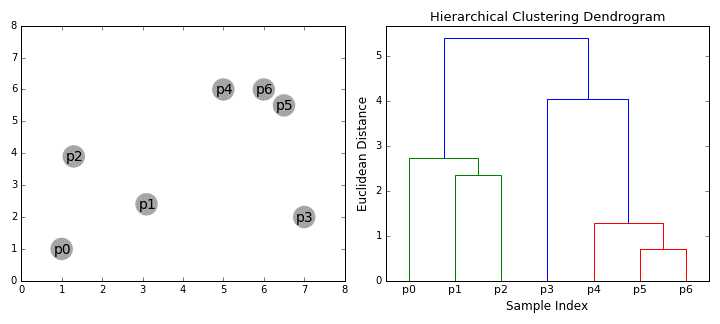
- 首先假设集群内的每个样本都是一个单独的类,然后再选择一个距离度量方式,计算任何两类之间的距离。比如使用平均距离法计算两个类之间的距离,取第一个簇内样本点和第二个簇内样本点之间的平均距离。
- 在每一次迭代过程中都会将两个簇合并为一个簇
- 重复执行第二步骤,直至所所有样本点被合并到一个簇内,即只有一个顶点。
以上是关于常见的5中聚类算法的主要内容,如果未能解决你的问题,请参考以下文章