代客泊车的环视图鱼眼BEV感知的数据集基线方法和克服畸变的多任务框架
Posted Being_young
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了代客泊车的环视图鱼眼BEV感知的数据集基线方法和克服畸变的多任务框架相关的知识,希望对你有一定的参考价值。
点云PCL免费知识星球,点云论文速读。
文章:Surround-view Fisheye BEV-Perception for Valet Parking: Dataset, Baseline and Distortion insensitive Multi-task Framework
作者:Zizhang Wu1& Yuanzhu Gan1& Xianzhi Li2∗ Yunzhe Wu1 Xiaoquan Wang1 Tianhao Xu3 Fan Wang1
编辑:点云PCL
欢迎各位加入免费知识星球,获取PDF论文,欢迎转发朋友圈。文章仅做学术分享,如有侵权联系删文。未经博主同意请勿擅自转载。
公众号致力于点云处理,SLAM,三维视觉,高精地图等领域相关内容的干货分享,欢迎各位加入,有兴趣的可联系dianyunpcl@163.com。未经作者允许请勿转载,欢迎各位同学积极分享和交流。
摘要
代客泊车场景下的环视鱼眼相机的感知是自动驾驶的基础和关键,停车场的环境条件表现不同于普通的公共数据集,例如不完美的光线和空间,这对感知性能有很大影响,大多数基于公共数据集的现有网络可能会概括这些代客泊车场景的次优结果,也会受到鱼眼失真的影响。在这篇文章中,我们介绍了一个新的大型鱼眼数据集,称为鱼眼泊车数据集(FPD),以促进在处理不同的现实全景停车场景案例方面的研究,值得注意的是,我们编译的FPD在不同的环视图感知任务中表现出优异的特性。此外还提出了我们的实时畸变不敏感多任务感知网络(FPNet)框架,该框架通过增强鱼眼失真操作和多任务轻量化设计来改善环视图鱼眼BEV感知。大量实验验证了我们方法的有效性和数据集的异常下的可推广性。
主要贡献
为满足自动驾驶开发的不断提高的要求,过去十年中,先驱性工作创造了许多数据集,这些数据集涵盖了大多数自动驾驶任务,如物体检测,语义分割,深度估计,车道检测,运动估计等,为自动驾驶做出了巨大贡献。然而,这些数据集几乎都是针孔相机数据集,视野受限。实际上,广泛的视觉任务也采用全景鱼眼相机监视周围环境,因为它们具有大的视场(FoV)和足够稳定的性能。当自车可以使用四个鱼眼相机实现360度感知,这有助于大规模生产,此外,全向相机也捕捉360度的视野,在水平平面上覆盖了一个完整的圆。Valeo发布了第一个鱼眼数据集Woodscape,以鼓励鱼眼模型的开发,但是由于数据保护限制,Woodscape没有发布LiDAR地面真值,KITTI360提供了另一个包含丰富传感信息(包括针孔和鱼眼相机)的大规模数据集,对于全向相机,工业界和学术界提供了像Stanford2D3D,Matterport3D,360D,PanoSUNCG 等数据集用于全向视觉感知,然而,这些数据集通常关注地面以上的自动驾驶场景,如城市、农村和高速公路。目前尚无针对代客泊车场景的公开基准数据集,我们的鱼眼停车数据集(FPD)可以填补这一空白,促进研究处理真实世界的停车场景。
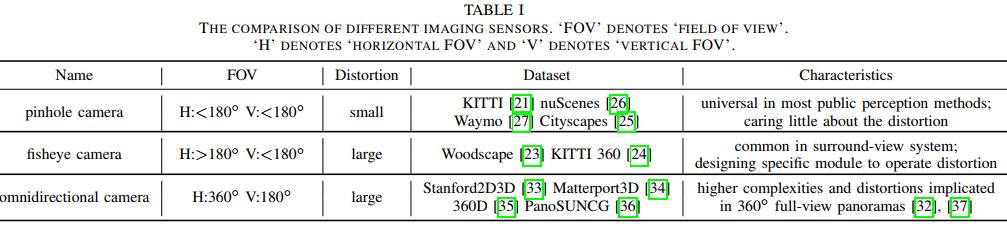
大多数公共感知方法设计针对针孔图像的模块,这些方法进行透视投影,对相机畸变关注较少,然而,当使用广角摄像头(如鱼眼相机或全向相机)时,研究人员必须关注较大的畸变和其他问题。环视自动驾驶系统通常采用鱼眼相机实现周围环境的感知,构建特定组件来处理畸变。全向相机揭示了在360◦全景图像中涉及的更高复杂性和畸变,全向图像感知还需要处理畸变和由较大分辨率、图像预处理和知识转换等问题引起的问题。表I展示了三种成像传感器的更多比较。
FPD鱼眼泊车数据集专注于代客泊车环视感知任务,并填补了处理现实停车场场景研究的空缺,此外,在FPD上提供基线方案,提出了针对环视鱼眼感知任务的实时抗畸变多任务网络FPNet,包括2D物体检测,单目3D物体检测,俯视图感知和单目稠密深度估计。该网络在轻量级和准确性之间取得平衡,并具有特殊的模块来处理鱼眼畸变。我们的贡献总结如下:
• 我们构建了第一个鱼眼泊车数据集FPD,专注于环视鱼眼感知,包括2D物体检测,3D物体检测,鸟瞰图感知和深度估计,贡献了FPD包括超过40万张鱼眼图像。
• 我们提出了我们的FPD基线方案:针对环视感知任务的抗畸变多任务框架FPNet,特别是俯视图感知。FPNet利用特殊的畸变模块和轻量级设计实现了实时,抗畸变和准确性能。
• 综合实验验证了我们收集的FPD数据集的实用性和FPNet的有效性。
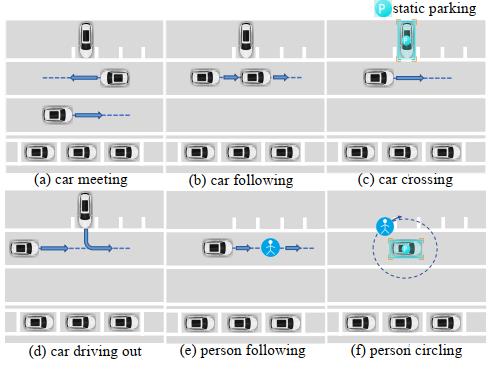
图1,停车场内的几个代客泊车场景,包括车辆相遇、车辆跟随、车辆穿越、车辆驶出、人员跟随和人员绕圈等。
主要内容
Fisheye停车数据集(FPD),包括数据收集和注释过程、数据集描述和显著特征等方面的详细内容。
A.数据收集
为确保自动驾驶场景的多样性,我们在三个城市、100多个停车场、白天和晚上等不同条件下,拍摄了超过400个视频以及激光雷达的点云序列。图2展示了我们收集到的几个真实的鱼眼停车场景图像。
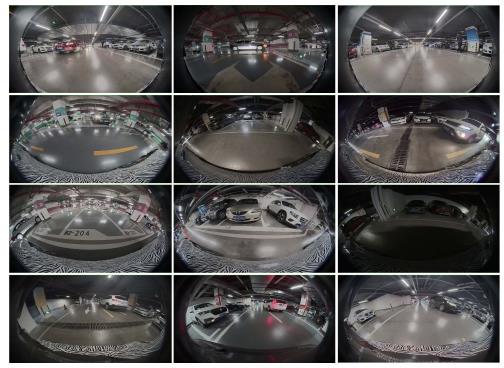
图2. 我们收集的真实代客泊车场景的图例,包括不同的停车条件、不同的光照条件和不同的遮挡。
具体来说,我们使用了RoboSense RSRuby作为主雷达,它有128个光束,10Hz的捕获频率,360度水平视场和-25度到+15度的垂直视场。此外选择了四个纵目鱼眼RGB相机,分辨率为1920×1280,捕获频率为20Hz。
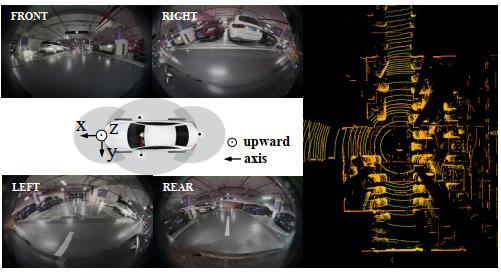
图3,传感器的安装位置以及生成的图像或点云可视化,其中前保险杠的中心设置为自车辆坐标系的原点
图3展示了这些传感器的安装位置及它们产生的图像或点云的性能,在数据记录过程中,系统会对相机的视频和激光雷达的点云序列进行时间戳对齐,以备后续注释,此外,我们还进行了以下三个步骤的传感器校准过程,首先,我们可以通过初始工厂设置提供的镜头畸变查找表直接计算相机的内参,其次,我们通过测量设备,根据自车坐标系计算出激光雷达和相机的外参(x,y,z,pitch,yaw,roll),第三,我们通过对投影的激光雷达点和图像语义内容进行对齐,进一步校正相机的外参,如图5所示,我们通过上述校准将激光雷达点投影到图像平面,然后手动调整相机的外参,以使其与投影点和语义内容相匹配。
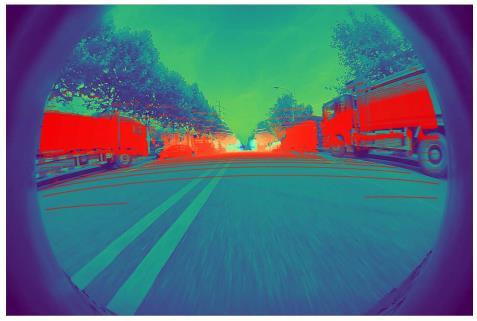
图5. 我们将激光雷达点投影到相机图像平面上以矫正相机的外参,其中颜色表示点的不同距离
为了覆盖停车场的各种真实场景,我们人为地安排了多种驾驶场景来收集数据,例如车辆相遇、车辆穿越和人员绕行等,如图1所示,这些是自动停车任务中常见但关键的场景。
B. 数据标注
与KITTI数据集相同的方式对数据集进行标注,即在每个物体的完整点云周围绘制紧密的边界框,不对所有物体的连续移动过程进行覆盖标注,相反删除类似的片段,并以三到五帧的间隔对数据进行标注,此外限制可见范围(在15米内),因此我们放弃了太远的物体,对于被遮挡的物体,如果遮挡率小于80%,我们保留3D边界框,通过标注员的经验想象完整的3D边界框,图6显示了我们标注标签的几个示例。
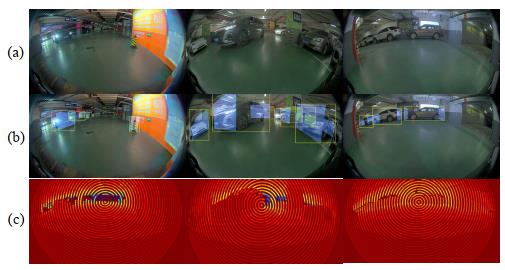
图6. 标注标签的可视化结果。(a) 拍摄的单目鱼眼图像; (b) 相关的2D对象标签(黄色边界框)和投影的3D对象标签(蓝色边界框); (c) 根据真值完成深度值计算的深度图。
我们的标注包含八个类别,包括汽车,卡车,行人,骑手,婴儿车,交通锥,摩托车和无停车标志,图4演示了八个类别的标注演示,其中蓝色边界框表示3D注释的2D可视化,从点云平面投影到图像平面,黄色边界框表示蓝色投影点的外部边界矩形,作为我们的2D目标检测ground truth,也在图6(b)中显示。

图4. 我们的数据注释包括八个类别,包括汽车、卡车、行人、骑行者、婴儿车、交通锥桶、摩托车和禁止停车标志
此外,通过校准和畸变参数将点云投影到单目图像中,用于稀疏深度图,然后,我们采用深度估计方法IP-Basic来创建更强的深度ground truth,如图6(c)所示。
C. 数据集描述
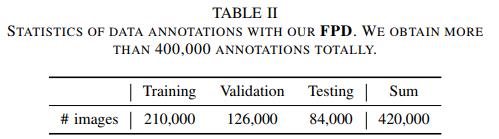
表格II和图7展示了FPD的统计信息,总共,我们获得了超过400000个数据,其中每个数据包含四个鱼眼图像和一个带标注的点云,此外,每个数据附带一个内参、一个外参和一个鱼眼畸变参数,可以通过内参、外参和鱼眼畸变参数将点云标签投影到图像中,以获取2D物体边界框和深度ground truth。此外将FPD按比例分为训练、验证和测试集,比例为5:3:2,数量分别为210,000、126,000和84,000,日间和夜间场景的比例为2:1,此外,每个停车场平均有4000个数据组成了超过400000个标签,其中最频繁的类别是汽车、行人和交通锥,如图7所示。
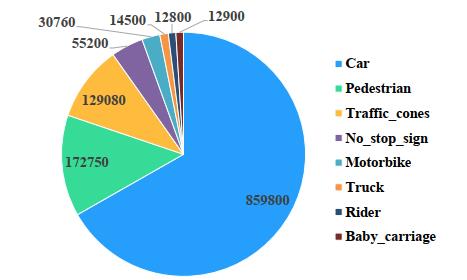
图7. FPD在不同类别中的详细数据分布
D. 数据集特性
作为第一个大规模实际的鱼眼数据集,FPD具有以下良好特性:
1)第一个停车场景的鱼眼数据集:提供了第一个聚焦于多个自动驾驶任务的停车场景鱼眼数据集FPD,与公共数据集的自然场景有所不同,停车场景中的环境条件,例如光线和不透明度,显著增加了检测难度。针对各种困难的停车场景,FPD可以促进解决实际停车问题的研究。
2)大规模数据:到目前为止,我们的FPD包含来自200多小时停车场景视频和点云序列的超过400,000个数据,未来将继续收集不同类型的停车场景,以丰富现有数据集。
3)高质量和多样性:FPD覆盖了三个城市、来自不同时期的100多个停车场和不同的停车情况,此外精心挑选高分辨率的高质量图像和点云,确保我们的数据集的优越性。
4)多用途:作为一个基于点云的数据集,FPD不仅可以用于三个任务(即2D目标检测、单目3D目标检测和深度估计),而且可以用于其他视觉任务,例如点云3D目标检测、2D或3D语义分割、视频目标检测,因此,FPD对于不同的任务具有多重用途。
畸变鲁棒的多任务框架
全景鱼眼单目畸变鲁棒多任务框架FPNet,图8展示了我们FPNet的框架,主要由共享特征提取器和多任务感知模块组成,包括2D物体检测头、3D物体检测头和深度估计。
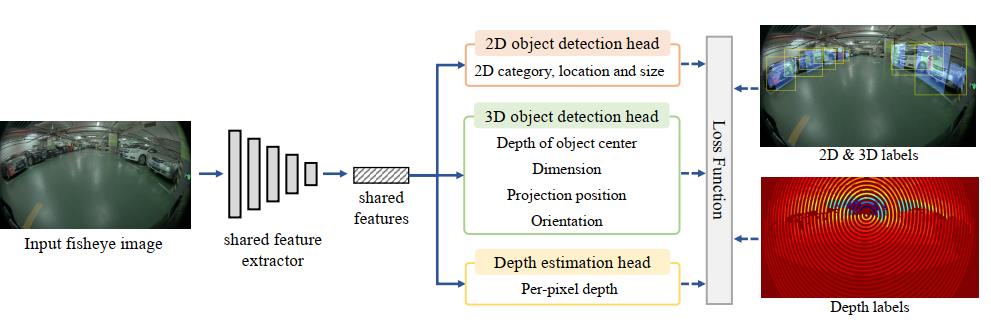
图8 展示了我们FPNet的框架,主要由共享特征提取器和多任务感知模块组成,包括2D目标检测头、3D目标检测头和深度估计
共享特征提取器:为平衡性能和速度之间的权衡,我们选择DLA34作为共享特征提取器,此外应用一些改进措施以达到轻量级的要求,首先将输入图像的下采样比例从通常的4调整为8,这样可以节省大量时间,但仍保持准确性,其次,我们根据嵌入式设备上的推理时间,去除了一些冗余层,仍然具有很好的性能。
多任务感知:在从鱼眼单眼图像中提取特征后,通过多任务感知对我们的三个感知任务进行预测。通过Fisheye Distortion Module (FDM)实现了去畸变功能,它正确地建立了3D空间和2D图像平面之间的鱼眼投影,以排除畸变的干扰,该模块具有两个主要功能:
(i)通过投影3D地面真实值来产生2D标签;
(ii)从2D图像点还原3D位置,与针孔模型投影相比,鱼眼模型投影需要考虑鱼眼畸变的影响。
实验
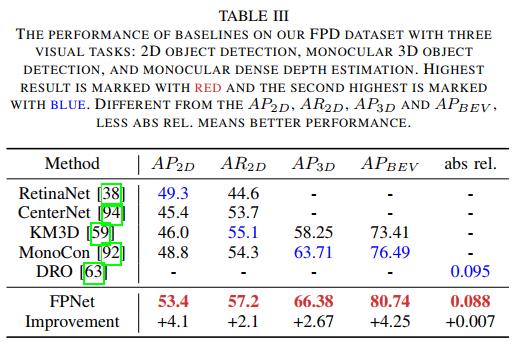
1. FPD的结果:为了展示我们的FPNet方法的有效性,我们基于FPD进行了三个任务的基准评估,如表III所示。
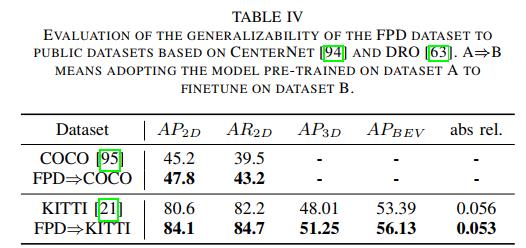
2)跨数据集评估:验证了我们的 FPD 在其他公共数据集上的泛化性能,在两个常规数据集 COCO 和 KITTI 上训练了 CenterNet对象检测模型和 DRO深度估计模型,如表 IV 所示。
3) 定性结果:提供了关于FPD 的定性示例,如图 11 和图 10 所示。图 11 显示了一些泊车员停车场场景的定性结果。(b) 表示 2D 和 3D 投影结果,(c) 表示密集深度估计。我们的多任务网络满足不同泊车员停车场场景中的实时感知需求。
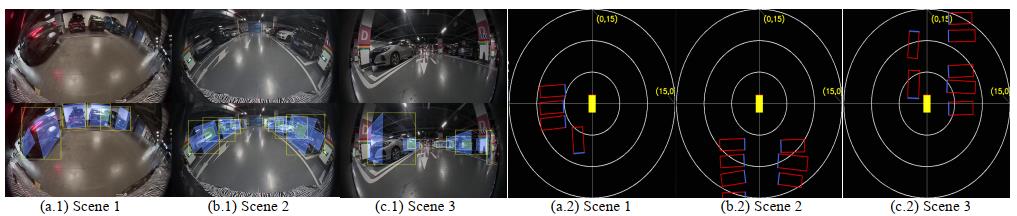
图10. FPD上更多物体和方向的定性结果,(a) 输入图像;(b) 2D目标检测结果(黄色框)和投影的3D目标检测结果(蓝色框);(c) 从3D结果得到的BEV可视化,其中红色边界框表示预测结果,蓝色部分表示物体的头部。
图 10 展示了更多物体和其他方向的可视化结果,值得注意的是,(c) 表示从 3D 检测结果的 BEV 可视化。从图 10 可以看出,我们的网络实现了对不同方向拥挤物体的良好感知表现。
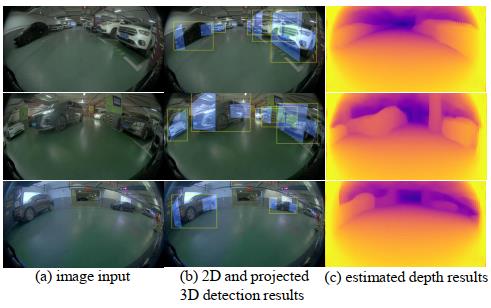
图11,FPD上几个代客泊车场景的定性结果,(a)输入图像; (b) 2D物体检测结果(黄色框)和投影的3D物体检测结果(蓝色框); (c) 估计的深度结果。
总结
本文提出了一个新的大规模鱼眼数据集,称为鱼眼泊车数据集(FPD),通过提供多样的环视停车场景,该数据集旨在帮助行业构建更安全的停车辅助驾驶系统,此外,我们提供了实时的多任务鱼眼感知网络(FPNet),以增强鱼眼畸变性能和各种轻量级设计,在FPD上的广泛实验验证了我们的FPNet的有效性,然而FPD仍有很大的发展空间,包括如何增强更多的数据多样性、简化我们的方法以及如何处理不断增加的数据和多样化的视觉任务的潜力,尽管如此,我们期望FPD能激发更多相关研究并促进停车场景下的环视感知性能。在未来,我们将进一步探索环视鱼眼BEV感知在代客泊车方面的应用,具体包括以下方面:
(1)探索激光雷达-相机融合感知,因为激光雷达点云提供更多的三维信息。
(2)探索轻量级图像特征提取器,以实现更强大的视觉特征。
(3)设计特定的技术来增强扭曲的鱼眼图像,以提高泛化能力。
(4)将我们的环视鱼眼BEV感知和数据集应用于其他任务,例如障碍物检测。
更多详细内容请加入智驾全栈与3D视觉学习星球
智驾全栈与3D视觉学习星球:主要针对智能驾驶全栈相关技术,3D/2D视觉技术学习分享的知识星球,将持续进行干货技术分享,知识点总结,代码解惑,最新paper分享,解疑答惑等等。星球邀请各个领域有持续分享能力的大佬加入我们,对入门者进行技术指导,对提问者知无不答。同时,星球将联合各知名企业发布自动驾驶,机器视觉等相关招聘信息和内推机会,创造一个在学习和就业上能够相互分享,互帮互助的技术人才聚集群。
资源
自动驾驶及定位相关分享
【点云论文速读】基于激光雷达的里程计及3D点云地图中的定位方法
自动驾驶中基于激光雷达的车辆道路和人行道实时检测(代码开源)
更多文章可查看:点云学习历史文章大汇总
SLAM及AR相关分享
结构化PLP-SLAM:单目、RGB-D和双目相机使用点线面的高效稀疏建图与定位方案
以上内容如有错误请留言评论,欢迎指正交流。如有侵权,请联系删除
扫描二维码
关注我们
让我们一起分享一起学习吧!期待有想法,乐于分享的小伙伴加入知识星球注入爱分享的新鲜活力。分享的主题包含但不限于三维视觉,点云,高精地图,自动驾驶,以及机器人等相关的领域。
分享及合作方式:微信“920177957”(需要按要求备注) 联系邮箱:dianyunpcl@163.com,欢迎企业来联系公众号展开合作。
点一下“在看”你会更好看耶
以上是关于代客泊车的环视图鱼眼BEV感知的数据集基线方法和克服畸变的多任务框架的主要内容,如果未能解决你的问题,请参考以下文章