4opencv求解向量和轮廓的交点
Posted jsxyhelu
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了4opencv求解向量和轮廓的交点相关的知识,希望对你有一定的参考价值。
在“学习OpenCV3"的QQ群众,网友且行且珍惜针对前期博客(https://www.cnblogs.com/jsxyhelu/p/9345590.html)中的内容提出了以下问题:
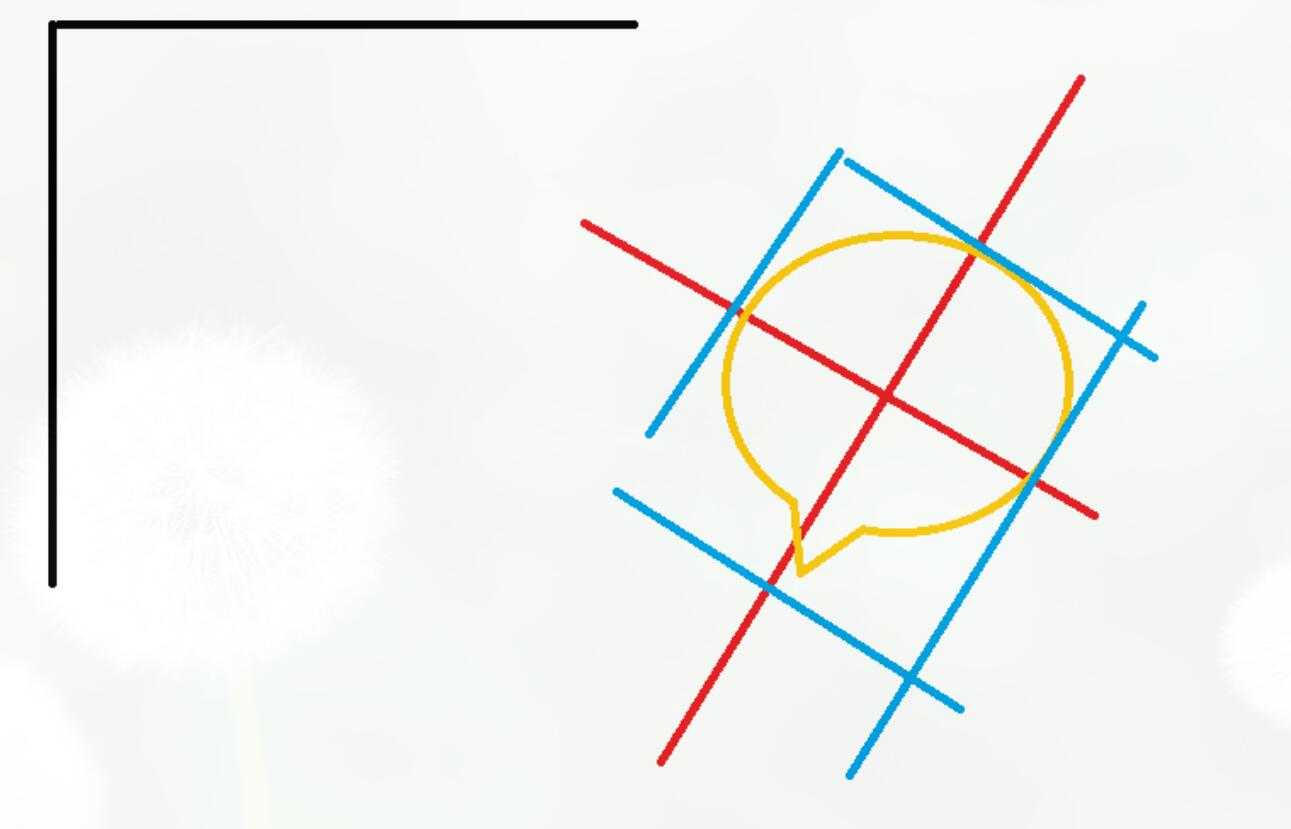
比如这张图,利用PCA求出了特征向量之后,我想要求解与轮廓的交点,不知道有没有简单的方法 @禾老师
@禾老师
@禾老师 非常好的问题!在寻找到轮廓的”主方向“后,往往下一个动作就是寻找向量和轮廓的交点,因为往往这才是我们更关心的地方。为了解决这个问题,我认为的思路应该是这样的:
1、首先要界定范围。对于交点来说,肯定是在这个轮廓的“最小外接矩形”中的,所以先求出外接矩形作为限定;
2、向量只是一个方向,要将其变成一条直线(如果在“最小外接矩形”中就是线段),推荐使用LineIterator来表示直线;
3、最后,判断这条线段上的点是否在轮廓上,可以使用pointpolytest函数。
结合代码具体讲解。为了凸显本文知识重点,本文采用以下一幅图像来说明算法
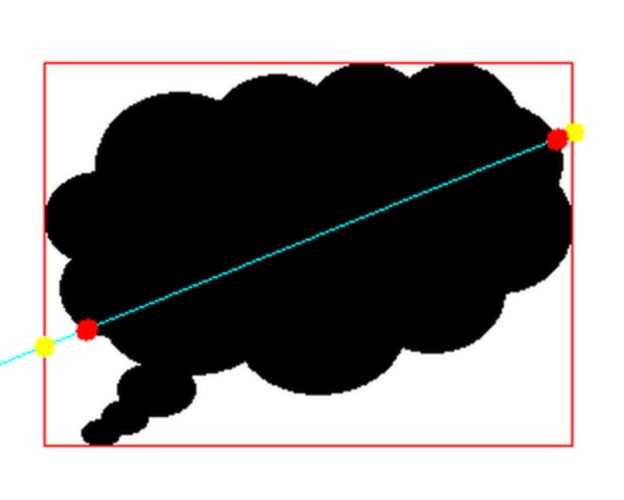
最后得到的结果是这样的,其中黄点为主方向向量和外界矩形交点,红点为和轮廓交点。
全部代码为:
/************************************************************************/
// 求解向量和轮廓的交点
// by jsxyhelu(jsxyhelu.cnblogs.com)
// 2018/10/05
/************************************************************************/
#include "stdafx.h"
#include "opencv2/imgcodecs.hpp"
#include "opencv2/highgui.hpp"
#include "opencv2/imgproc.hpp"
#include "opencv2/photo.hpp"
using namespace std;
using namespace cv;
//寻找最大外接轮廓
vector<Point> FindBigestContour(Mat src){
int max_area_contour_idx = 0;
double max_area = -1;
vector<vector<Point> >contours;
findContours(src,contours,RETR_LIST,CHAIN_APPROX_SIMPLE);
//handle case if no contours are detected
CV_Assert(0 != contours.size());
for (uint i=0;i<contours.size();i++){
double temp_area = contourArea(contours[i]);
if (max_area < temp_area ){
max_area_contour_idx = i;
max_area = temp_area;
}
}
return contours[max_area_contour_idx];
}
//程序主要部分
int main( int argc, char** argv )
{
//读入图像,转换为灰度
Mat src = imread("E:/sandbox/cloud.png");
Mat src_gray;
cvtColor(src, src_gray, COLOR_BGR2GRAY);
//阈值处理
Mat threshold_output;
cv::threshold(src_gray,threshold_output,150,255,THRESH_OTSU|THRESH_BINARY_INV);
//轮廓分析
vector<vector<Point> > contours;
vector<Vec4i> hierarchy;
vector<Point> biggestContour = FindBigestContour(threshold_output);//寻找最大轮廓
Rect boundRect = boundingRect( Mat(biggestContour) ); //获得轮廓最小外接矩形
cv::rectangle(src,boundRect,Scalar(0,0,255));
//pca分析,求出斜率和经过的一点
Mat data_pts = Mat(biggestContour.size(), 2, CV_64FC1);//Construct a buffer used by the pca analysis
for (int i = 0; i < data_pts.rows; ++i)
{
data_pts.at<double>(i, 0) = biggestContour[i].x;
data_pts.at<double>(i, 1) = biggestContour[i].y;
}
PCA pca_analysis(data_pts, Mat(), CV_PCA_DATA_AS_ROW);//执行PCA运算
Point pos = Point2f(pca_analysis.mean.at<double>(0, 0),
pca_analysis.mean.at<double>(0, 1)); //主方向直线经过的一点
vector<Point2d> eigen_vecs(2); //保存PCA分析结果,其中0组为主方向,1组为垂直方向
vector<double> eigen_val(2);
for (int i = 0; i < 2; ++i)
{
eigen_vecs[i] = Point2d(pca_analysis.eigenvectors.at<double>(i, 0),
pca_analysis.eigenvectors.at<double>(i, 1));
eigen_val[i] = pca_analysis.eigenvalues.at<double>(i,0);
}
line(src, pos - 0.02 * Point(eigen_vecs[0].x * eigen_val[0],eigen_vecs[0].y * eigen_val[0]),
pos+0.02 * Point(eigen_vecs[0].x * eigen_val[0],eigen_vecs[0].y * eigen_val[0]) , Scalar(255, 255, 0));//绘制概略主方向
//求出主方向直线和外接矩形的交点,
float k = eigen_vecs[0].y/eigen_vecs[0].x; //斜率
Point2f pt1 = Point2f(boundRect.x,k*(boundRect.x - pos.x)+pos.y);
Point2f pt2 = Point2f((boundRect.x+boundRect.width),k*((boundRect.x+boundRect.width)-pos.x)+pos.y);
circle(src,pt1,5,Scalar(0,255,255),-1);
circle(src,pt2,5,Scalar(0,255,255),-1);
//遍历两个交点之间的线段,得出和轮廓的交点
LineIterator it(src, pt1, pt2, 8);
for(int i = 0; i < it.count; i++, ++it)
{
Point pt(it.pos());//获得线段上的点
if (abs(pointPolygonTest(biggestContour,pt,true)) < 1)
circle(src,pt,5,Scalar(0,0,255),-1);
}
waitKey();
return 0;
}
// 求解向量和轮廓的交点
// by jsxyhelu(jsxyhelu.cnblogs.com)
// 2018/10/05
/************************************************************************/
#include "stdafx.h"
#include "opencv2/imgcodecs.hpp"
#include "opencv2/highgui.hpp"
#include "opencv2/imgproc.hpp"
#include "opencv2/photo.hpp"
using namespace std;
using namespace cv;
//寻找最大外接轮廓
vector<Point> FindBigestContour(Mat src){
int max_area_contour_idx = 0;
double max_area = -1;
vector<vector<Point> >contours;
findContours(src,contours,RETR_LIST,CHAIN_APPROX_SIMPLE);
//handle case if no contours are detected
CV_Assert(0 != contours.size());
for (uint i=0;i<contours.size();i++){
double temp_area = contourArea(contours[i]);
if (max_area < temp_area ){
max_area_contour_idx = i;
max_area = temp_area;
}
}
return contours[max_area_contour_idx];
}
//程序主要部分
int main( int argc, char** argv )
{
//读入图像,转换为灰度
Mat src = imread("E:/sandbox/cloud.png");
Mat src_gray;
cvtColor(src, src_gray, COLOR_BGR2GRAY);
//阈值处理
Mat threshold_output;
cv::threshold(src_gray,threshold_output,150,255,THRESH_OTSU|THRESH_BINARY_INV);
//轮廓分析
vector<vector<Point> > contours;
vector<Vec4i> hierarchy;
vector<Point> biggestContour = FindBigestContour(threshold_output);//寻找最大轮廓
Rect boundRect = boundingRect( Mat(biggestContour) ); //获得轮廓最小外接矩形
cv::rectangle(src,boundRect,Scalar(0,0,255));
//pca分析,求出斜率和经过的一点
Mat data_pts = Mat(biggestContour.size(), 2, CV_64FC1);//Construct a buffer used by the pca analysis
for (int i = 0; i < data_pts.rows; ++i)
{
data_pts.at<double>(i, 0) = biggestContour[i].x;
data_pts.at<double>(i, 1) = biggestContour[i].y;
}
PCA pca_analysis(data_pts, Mat(), CV_PCA_DATA_AS_ROW);//执行PCA运算
Point pos = Point2f(pca_analysis.mean.at<double>(0, 0),
pca_analysis.mean.at<double>(0, 1)); //主方向直线经过的一点
vector<Point2d> eigen_vecs(2); //保存PCA分析结果,其中0组为主方向,1组为垂直方向
vector<double> eigen_val(2);
for (int i = 0; i < 2; ++i)
{
eigen_vecs[i] = Point2d(pca_analysis.eigenvectors.at<double>(i, 0),
pca_analysis.eigenvectors.at<double>(i, 1));
eigen_val[i] = pca_analysis.eigenvalues.at<double>(i,0);
}
line(src, pos - 0.02 * Point(eigen_vecs[0].x * eigen_val[0],eigen_vecs[0].y * eigen_val[0]),
pos+0.02 * Point(eigen_vecs[0].x * eigen_val[0],eigen_vecs[0].y * eigen_val[0]) , Scalar(255, 255, 0));//绘制概略主方向
//求出主方向直线和外接矩形的交点,
float k = eigen_vecs[0].y/eigen_vecs[0].x; //斜率
Point2f pt1 = Point2f(boundRect.x,k*(boundRect.x - pos.x)+pos.y);
Point2f pt2 = Point2f((boundRect.x+boundRect.width),k*((boundRect.x+boundRect.width)-pos.x)+pos.y);
circle(src,pt1,5,Scalar(0,255,255),-1);
circle(src,pt2,5,Scalar(0,255,255),-1);
//遍历两个交点之间的线段,得出和轮廓的交点
LineIterator it(src, pt1, pt2, 8);
for(int i = 0; i < it.count; i++, ++it)
{
Point pt(it.pos());//获得线段上的点
if (abs(pointPolygonTest(biggestContour,pt,true)) < 1)
circle(src,pt,5,Scalar(0,0,255),-1);
}
waitKey();
return 0;
}
知识重点:
1、FindBigestContour为寻找轮廓中最大轮廓的函数,目前这个函数还没有merge到OpenCV中,下一步有这个计划,注意这个函数的命名规则是按照OpenCV的方法定义的;
2、我们采用Rect boundRect = boundingRect( Mat(biggestContour) );
来获得轮廓的最小外接矩形。为什么要首先获得这个外接矩形了,因为我们这里来所有要求的点肯定都在这个矩形中,我们做这一步就能够降低算法的计算复杂程度;
3、PCA分析的具体原来和细节,请查看《如何获得物体的主要方向?》 https://www.cnblogs.com/jsxyhelu/p/7690699.html
我们这里使用,主要是获得两个数据,一个是该轮廓的重心,这个点是我们最后要求的那条直线肯定经过的;二个是求出直线的斜率。那么对于一条直线,已经知道斜率和经过的一点,就已经能够被定义出来;
4、最后在求该直线和轮廓的交点的时候,采用了LineIterator 和pointPolygonTest,前者是OpenCV中专门用来遍历直线的;后者是专门用来计算点和轮廓的关系的,应该说这里的应用还是非常高效的。
感谢阅读至此,希望有所帮助。
以上是关于4opencv求解向量和轮廓的交点的主要内容,如果未能解决你的问题,请参考以下文章