Opencv3 Robert算子 Sobel算子 拉普拉斯算子 自定义卷积核——实现渐进模糊
Posted herd
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Opencv3 Robert算子 Sobel算子 拉普拉斯算子 自定义卷积核——实现渐进模糊相关的知识,希望对你有一定的参考价值。
#include <iostream>
#include <opencv2/opencv.hpp>
using namespace std;
using namespace cv;
//Robert算子
int Demo_Robert()
{
char win1[] = "window1";
char win2[] = "window2";
char win3[] = "window3";
Mat img1, img2, img3, kernel_x, kernel_y;
img1 = imread("D://images//box//0019-00.jpg");
if (img1.empty())
{
cout << "could not load image..."<< endl;
return 0;
}
imshow(win1,img1);
//X方向—Robert算子
kernel_x = (Mat_<int>(2,2)<<1,0,0,-1);
filter2D(img1,img2,-1,kernel_x,Point(-1,-1),0,0);
//Y方向—Robert算子
kernel_y = (Mat_<int>(2, 2) << 0, 1, -1, 0);
filter2D(img1, img3, -1, kernel_y, Point(-1, -1), 0, 0);
imshow(win2, img2);
imshow(win3, img3);
return 0;
}
//Sobel算子
int Demo_Sobel()
{
char win1[] = "window1";
char win2[] = "window2";
char win3[] = "window3";
Mat img1, img2, img3, kernel_x, kernel_y;
img1 = imread("D://images//box//0019-00.jpg");
if (img1.empty())
{
cout << "could not load image..." << endl;
return 0;
}
imshow(win1, img1);
//X方向—Sobel算子
kernel_x = (Mat_<int>(3, 3) << -1,0,1,-2,0,2,-1,0,1);
filter2D(img1, img2, -1, kernel_x, Point(-1, -1), 0, 0);
//Y方向—Sobel算子
kernel_y = (Mat_<int>(3, 3) << -1,-2,-1,0,0,0,1,2,1);
filter2D(img1, img3, -1, kernel_y, Point(-1, -1), 0, 0);
imshow(win2, img2);
imshow(win3, img3);
return 0;
}
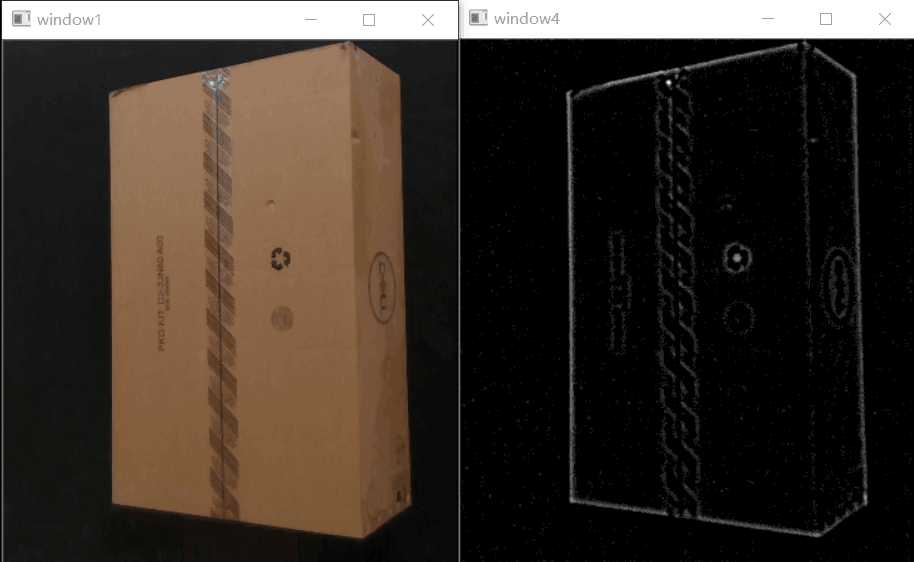
//拉普拉斯算子
int Demo_Laplace()
{
char win1[] = "window1";
char win2[] = "window2";
char win3[] = "window3";
Mat img1, img2, img3, kernel_x, kernel_y;
img1 = imread("D://images//box//0019-00.jpg");
if (img1.empty())
{
cout << "could not load image..." << endl;
return 0;
}
imshow(win1, img1);
//Laplace算子
kernel_x = (Mat_<int>(3, 3) << 0, -1, 0, -1, 4, -1, 0, -1, 0);
filter2D(img1, img2, -1, kernel_x, Point(-1, -1), 0, 0);
imshow(win2, img2);
return 0;
}
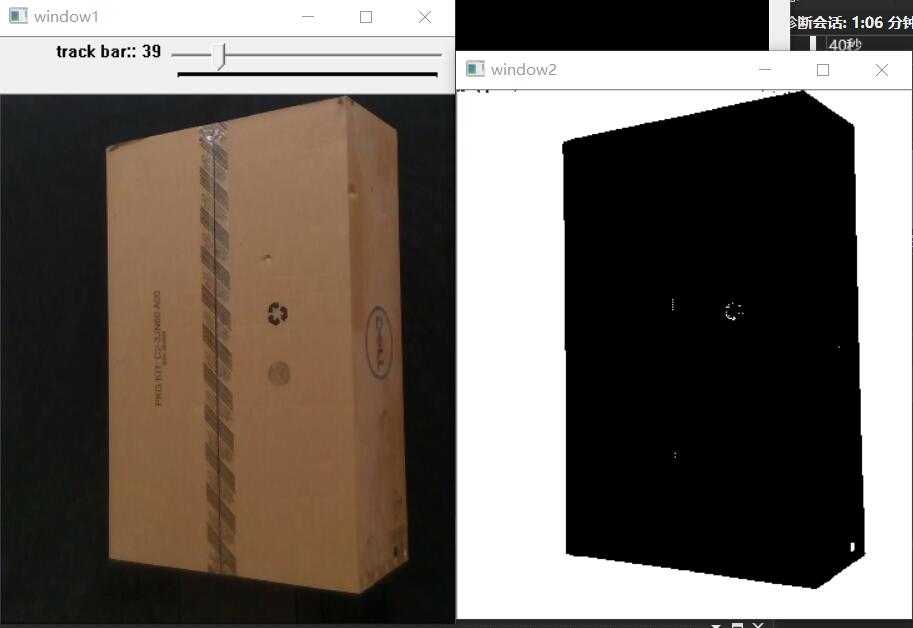
//自定义卷积核——实现渐进模糊
int Demo_Kernel()
{
char win1[] = "window1";
char win2[] = "window2";
char win3[] = "window3";
Mat img1, img2, img3, kernel_x, kernel_y;
img1 = imread("D://images//box//0019-00.jpg");
if (img1.empty())
{
cout << "could not load image..." << endl;
return 0;
}
imshow(win1, img1);
int c = 0;
int index = 0;
int ksize = 3;
while (true)
{
c = waitKey(600);
if ((char)c==27)
{
break;
}
ksize = 4 + (index % 5) * 2 + 1;
Mat kernel1 = Mat::ones(Size(ksize,ksize),CV_32F)/(float)(ksize*ksize);
filter2D(img1,img2,-1,kernel1,Point(-1,-1));
index++;
imshow(win2,img2);
}
imshow(win2, img2);
return 0;
}
int main()
{
//Demo_Robert();
//Demo_Sobel();
//Demo_Laplace();
Demo_Kernel();
waitKey(0);
return 0;
}
以上是关于Opencv3 Robert算子 Sobel算子 拉普拉斯算子 自定义卷积核——实现渐进模糊的主要内容,如果未能解决你的问题,请参考以下文章