基于 VPX 总线的工件台运动控制系统研究与开发-以光刻运动台为例
Posted 深圳信迈科技DSP+ARM+FPGA
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了基于 VPX 总线的工件台运动控制系统研究与开发-以光刻运动台为例相关的知识,希望对你有一定的参考价值。
工件台系统是光刻机的关键子系统之一,工件台运动控制系统对实现光刻机性能指标具有至关重要的作用,因此研发工件台运动控制系统具有极其重要的工程应用价值。论文根据工件台控制系统必须具备的并行性、同步性和实时性等技术需求,建立了基于 VPX 总线的工件台运动控制系统硬件体系,并针对基于 C6678 共享内存的数据并行交互机制和系统精密同步测控策略开展了研究。 为解决系统中存在的多处理器之间数据传输实时性、处理器运算性能、光纤接口数量以及系统计算架构等问题,通过对 VPX 总线中多总线协议的研究,采用基于 RapidIO 总线的全网状星型拓扑结构,并结合集成有多核 DSP TMS320C6678 的运动控制卡 MC_4DSP_VPX 和光纤接口卡 FC_FPGA_VPX 等硬件,设计了一种基于 RapidIO 多处理器互连架构的新型工件台运动控制系统硬件体系结构。 工件台的多子系统决定了系统数据并行处理的特征,因此从并行性和实时性出发,根据系统硬件体系结构,设计了控制系统的数据流,并以此建立了并行处理模型。根据并行模型的交互数据内容,规划了共享内存和核本地内存的存储空间,结合 C6678 的数据 Cache 与共享内存的数据一致性原则,实现了多核实时并行访问共享内存。 为了提高工件台控制系统性能,除了增强系统数据交互并行性,系统的同步性和实时性也至关重要。系统的同步主要分为多 DSP 同步和多核同步,为了实现实 时同步中断多个 DSP ,提出了两种同步测控方案,通过实验数据分析,基于 Direct I/O + GPIO 硬中断的同步测控方案比基于 Direct I/O + Doorbell 软中断的同步测控方案具有更好的同步性和实时性。为了实现 C6678 的多核同步,分别具体介绍了基于广播事件的多核同步技术和基于核间中断的多核同步技术两种方法,比较分析可知,基于广播事件的多核同步更能满足强实时系统设计要求。 在上述研究分析的基础上,以双扫描硅片台、掩模台为控制对象,对多核 DSP软件进行了整体框架设计。在现有的最小测试系统平台上,通过实验对比,验证了同步测控方案的可行性、软件设计的正确性以及控制系统的实时性和同步性。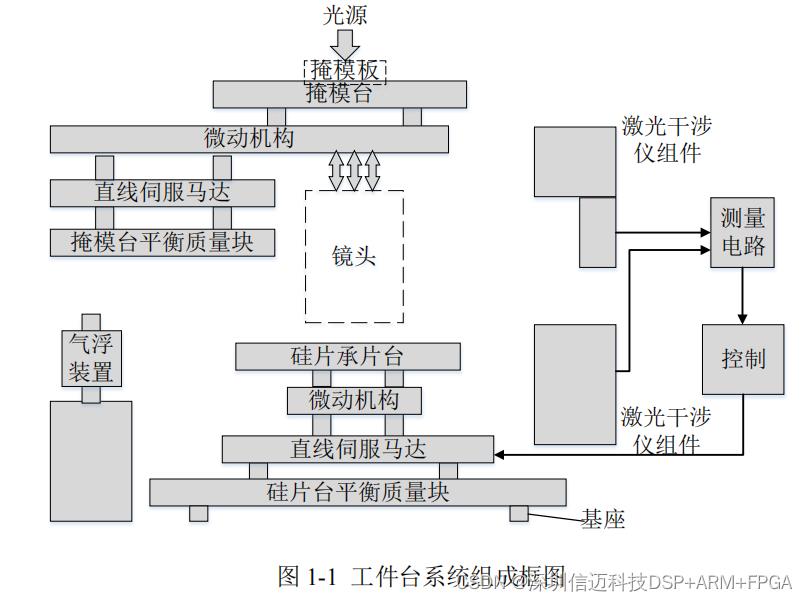 光刻机及其工件台概述
随着
IC
芯片的集成规模越来越大,光刻技术也经历了四十多年的发展历程,
从早期的接触式光刻、接近式光刻、扫描投影式光刻、分步重复投影式光刻到步进
扫描投影式光刻
[4]
。
目前比较主流的光刻机均采用步进扫描投影式技术,其基本曝光工作原理即
利用平行紫外线透过绘制有电路芯片构造的掩模,将掩模上的电路图像按照
4
:
1
的比例通过投影曝光复制到硅片上的曝光视场内,同时用来去除晶圆表面保护膜
[5]
。根据投影物镜光学系统的设计原理,曝光区域为整个曝光视场的一条狭缝
[6]
。
硅片上包含多个曝光视场,曝光过程中物镜固定不动,硅片台做步进运动,待曝光
的视场移动到物镜下,然后掩模台与硅片台沿
Y
方向以
4:1
的速度比做相反的同
步扫描运动,完成一场的扫描曝光,之后硅片台沿
X
方向做步进运动将硅片上的
下一曝光视场移动到物镜下,如此循环完成整个硅片上的所有曝光视场的曝光
[7]
。
在扫描曝光过程中,硅片台和掩模台的同步扫描运动精度、速度和加速度直接
影响到曝光过程中图案的成像质量。同时,
IC
芯片包含多层的复杂电路,需要多
次曝光,层与层之间的图案需要保证一定的位置关系即套刻精度。因此对光刻机工
件台的定位、同步运动精度等性能具有非常苛刻的要求
[8].
光刻机及其工件台概述
随着
IC
芯片的集成规模越来越大,光刻技术也经历了四十多年的发展历程,
从早期的接触式光刻、接近式光刻、扫描投影式光刻、分步重复投影式光刻到步进
扫描投影式光刻
[4]
。
目前比较主流的光刻机均采用步进扫描投影式技术,其基本曝光工作原理即
利用平行紫外线透过绘制有电路芯片构造的掩模,将掩模上的电路图像按照
4
:
1
的比例通过投影曝光复制到硅片上的曝光视场内,同时用来去除晶圆表面保护膜
[5]
。根据投影物镜光学系统的设计原理,曝光区域为整个曝光视场的一条狭缝
[6]
。
硅片上包含多个曝光视场,曝光过程中物镜固定不动,硅片台做步进运动,待曝光
的视场移动到物镜下,然后掩模台与硅片台沿
Y
方向以
4:1
的速度比做相反的同
步扫描运动,完成一场的扫描曝光,之后硅片台沿
X
方向做步进运动将硅片上的
下一曝光视场移动到物镜下,如此循环完成整个硅片上的所有曝光视场的曝光
[7]
。
在扫描曝光过程中,硅片台和掩模台的同步扫描运动精度、速度和加速度直接
影响到曝光过程中图案的成像质量。同时,
IC
芯片包含多层的复杂电路,需要多
次曝光,层与层之间的图案需要保证一定的位置关系即套刻精度。因此对光刻机工
件台的定位、同步运动精度等性能具有非常苛刻的要求
[8].
 为满足越来越高的运动控制性能、功能需求以及数据通讯速率要求,传统的工
件台运动控制系统在信息处理能力、数据吞吐速度、实时性等面临更高的技术挑战。
光刻机工件台的控制数据不断增加导致系统需要采用更高速率的总线来维持数据
流的通畅,因而整个运动控制系统的硬件和软件复杂度增大,技术难度也不断上升。
伴随着计算机技术和网络通信技术飞速发展,其技术和成本也正在逐渐降低,光刻
机制造商不断地更新高速计算机总线来构建更复杂、更高性能的运动控制系统。
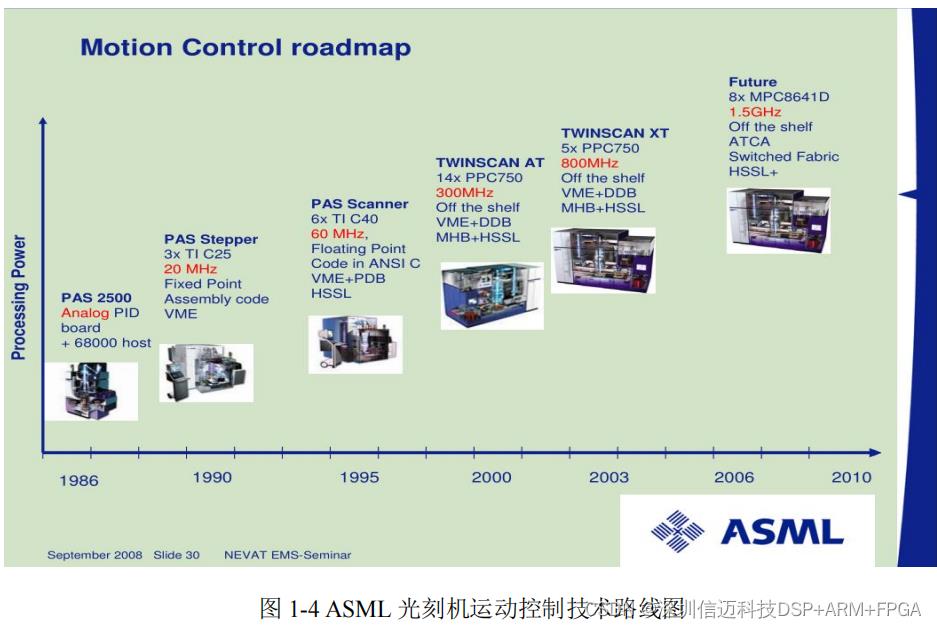
从近几年的国际半导体发展路线图(
ITRS
)来看,目前,特征线宽
65nm
以上
的光刻机一般采用基于
VME
总线技术的运动控制系统。
ASML
光刻机产品技术发
展史
[20]
中,如图
1-4
所示,从
PAS Stepper
产品才开始使用
VME
总线,且在
PAS
Scanner
、
TWINSCAN AT
、
TWINSCAN XT
[21]
等系列产品中一直延用。与此同时,
在
CARM
[22]
(
Control Architecture Reference Model
)体系中采用多处理器互连
[23]方
式,处理器的性能也从
20MHz
达到
800MHz
,因此就
ASML
光刻机运动控制系统
而言,伺服控制环执行时间也大大缩短
[24]
。
为满足越来越高的运动控制性能、功能需求以及数据通讯速率要求,传统的工
件台运动控制系统在信息处理能力、数据吞吐速度、实时性等面临更高的技术挑战。
光刻机工件台的控制数据不断增加导致系统需要采用更高速率的总线来维持数据
流的通畅,因而整个运动控制系统的硬件和软件复杂度增大,技术难度也不断上升。
伴随着计算机技术和网络通信技术飞速发展,其技术和成本也正在逐渐降低,光刻
机制造商不断地更新高速计算机总线来构建更复杂、更高性能的运动控制系统。
从近几年的国际半导体发展路线图(
ITRS
)来看,目前,特征线宽
65nm
以上
的光刻机一般采用基于
VME
总线技术的运动控制系统。
ASML
光刻机产品技术发
展史
[20]
中,如图
1-4
所示,从
PAS Stepper
产品才开始使用
VME
总线,且在
PAS
Scanner
、
TWINSCAN AT
、
TWINSCAN XT
[21]
等系列产品中一直延用。与此同时,
在
CARM
[22]
(
Control Architecture Reference Model
)体系中采用多处理器互连
[23]方
式,处理器的性能也从
20MHz
达到
800MHz
,因此就
ASML
光刻机运动控制系统
而言,伺服控制环执行时间也大大缩短
[24]
。
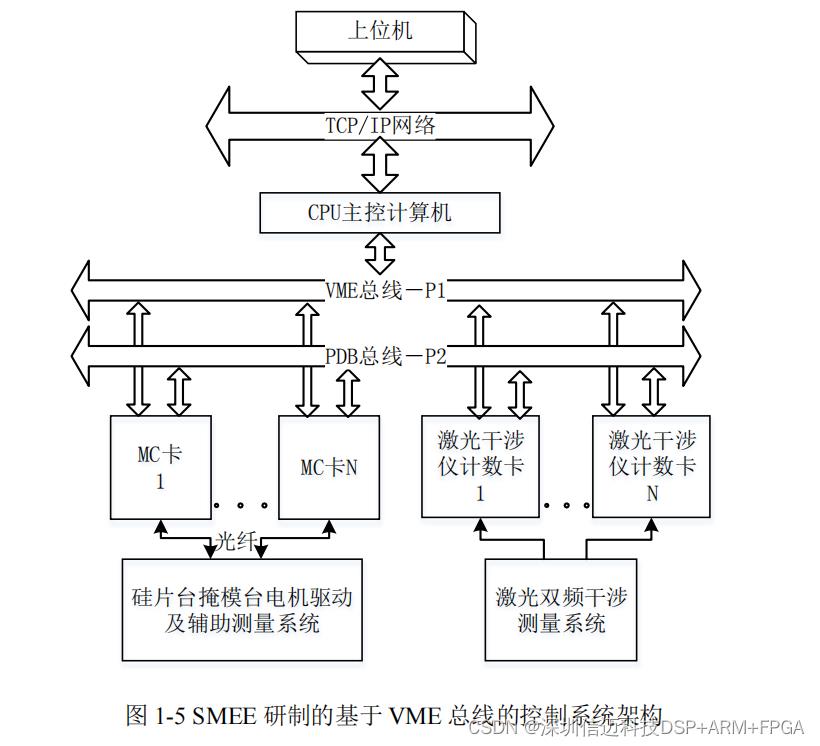
 1.4.2.3
华中科技大学等高校研制的
VME
控制系统
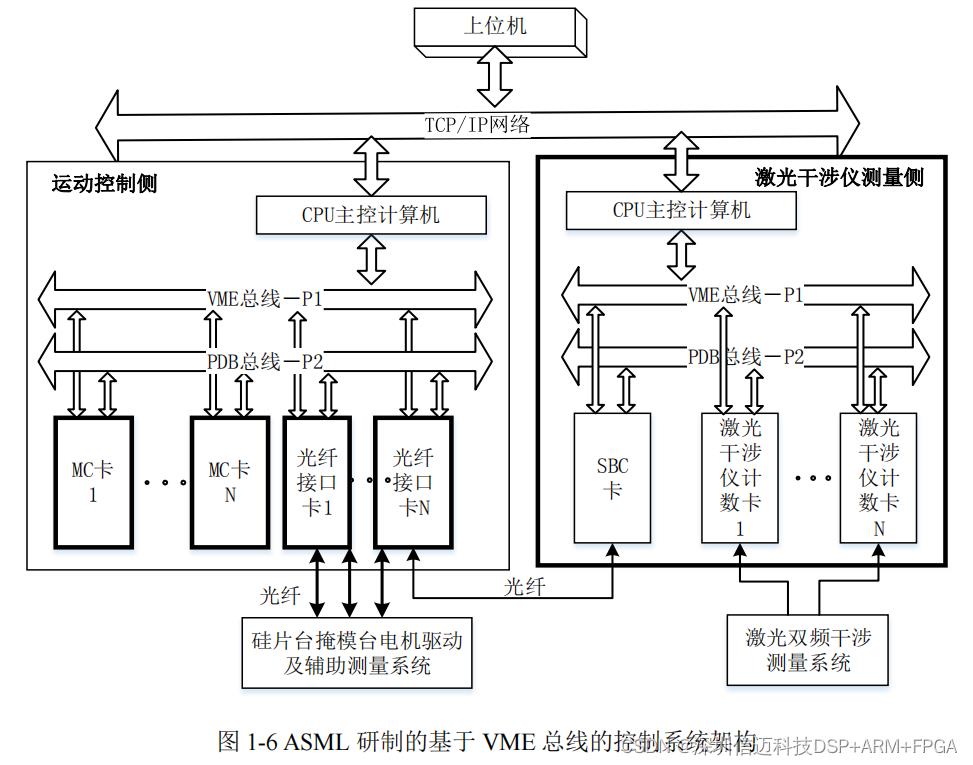
华中科技大学等高校研制的
VME
控制系统一部分沿袭了
SMEE
的技术方案,
优点是成熟稳定可靠。如图
1-7
,运动控制侧的
VME
系统完成运动控制功能,其
中的运动控制卡集成有光纤接口,可直接向电机驱动模块传输控制信号。由于控制
与测量信号大量增加,导致双工作台系统控制板卡很多,不能置于同一
VME
机箱,
因此参考
ASML
的方案,将系统分为运动控制子系统和激光干涉仪测量子系统。
在激光干涉仪测量子系统中,使用另外一套
VME
系统完成激光双频干涉信号的处
理,它与运动控制侧
VME
系统之间采用高速光纤保证激光双频干涉信号实时传输
到运动控制卡。在运动控制子系统中,通过带有光纤的同步总线控制卡
MBC
接收
激光干涉仪测量子系统的数据。同时,在
VME
总线和
PDB
总线上设计了对准系
统和调平调焦测量系统的接口,使得它们的信息能够实时反馈到运动控制系统中。
1.4.2.3
华中科技大学等高校研制的
VME
控制系统
华中科技大学等高校研制的
VME
控制系统一部分沿袭了
SMEE
的技术方案,
优点是成熟稳定可靠。如图
1-7
,运动控制侧的
VME
系统完成运动控制功能,其
中的运动控制卡集成有光纤接口,可直接向电机驱动模块传输控制信号。由于控制
与测量信号大量增加,导致双工作台系统控制板卡很多,不能置于同一
VME
机箱,
因此参考
ASML
的方案,将系统分为运动控制子系统和激光干涉仪测量子系统。
在激光干涉仪测量子系统中,使用另外一套
VME
系统完成激光双频干涉信号的处
理,它与运动控制侧
VME
系统之间采用高速光纤保证激光双频干涉信号实时传输
到运动控制卡。在运动控制子系统中,通过带有光纤的同步总线控制卡
MBC
接收
激光干涉仪测量子系统的数据。同时,在
VME
总线和
PDB
总线上设计了对准系
统和调平调焦测量系统的接口,使得它们的信息能够实时反馈到运动控制系统中。
信迈提供DSP+FPGA精密运动控制器在半导体设备行业的软硬件方案。
以上是关于基于 VPX 总线的工件台运动控制系统研究与开发-以光刻运动台为例的主要内容,如果未能解决你的问题,请参考以下文章
基于2片Xilinx Kintex-7系列FPGA高性能VPX存储板