[FreeRTOS入门] 1.CubeMX中FreeRTOS配置参数及理解
Posted greenlight-xj
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了[FreeRTOS入门] 1.CubeMX中FreeRTOS配置参数及理解相关的知识,希望对你有一定的参考价值。
1.有关优先级
1.1 Configuration --> FreeRTOS
|
MAX_PRIORITIES |
设置任务优先级的数量:配置应用程序有效的优先级数目。任何数量的任务都可以共享一个优先级,使用协程可以单独的给与它们优先权。见MAX_CO_ROUTINE_PRIORITIES。 在RTOS内核中,每个有效优先级都会消耗一定量的RAM,因此这个值不要超过你的应用实际需要的优先级数目。 每一个任务都会被分配一个优先级,优先级值从0~ (MAX_PRIORITIES - 1)之间。低优先级数表示低优先级任务。空闲任务的优先级为0(PriorityIdle),因此它是最低优先级任务。 ??FreeRTOS调度器将确保处于就绪状态(Ready)或运行状态(Running)的高优先级任务比同样处于就绪状态的低优先级任务优先获取处理器时间。换句话说,处于运行状态的任务永远是高优先级任务。 ??处于就绪状态的相同优先级任务使用时间片调度机制共享处理器时间。 |
|
Interrupt nesting behaviour configuration 断言配置 |
LIBRARY_LOWEST_INTERRUPT_PRIORITY
|
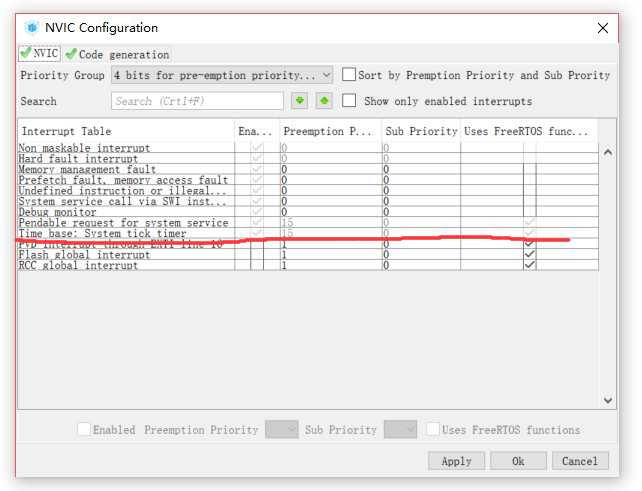
此宏定义是用来配置 FreeRTOS中用到的SysTick中断和PendSV中断的优先级reeRTOSreeRTOS reeRTOSreeRTOS 用到 的 SysTSysT ick 中断和 PendSV 中断 的优先级。在 NVIC分组设置为4的情况下,此宏定义的范围就是 0-15 ,即专门配置抢占优先级。这里 即专门配置抢占优先级。这里 配置 为了 15,即 SysTick和 PendSV 都配配置为了最低优先级,实际项目中也建议配置为最低优先级。 |
|
LIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY |
定义了受FreeRTOS管理的最高优先级中断。简单的说就是允许用户在这个中断服务程序里面调用FreeRTOS的API的最高优先级。设置NVIC的优先级分组为4的情况下(全部配置为抢占式优先级。又因为STM32的优先级设置仅使用CM内核8bit中的高4bit,即只能区分2^4 = 16种优先级。因此当优先级分组设置为4的时候可供用户选择抢占式优先级为0到15,共16个优先级,配置为0表示最高优先级,配置为15表示最低优先级,不存在子优先级。),配置LIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY可以在抢占式优先级为1到15的中断里面调用FreeRTOS的API函数,抢占式优先级为0的中断里面是不允许调用的。 Eg:configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY 为 0x01 表示用户可以在抢占式优先级为 1 到 15 的中断里面调用 FreeRTOS 的 API 函数,抢占式优先级为 0 的中断里面是不允许调用的。即抢占式优先级为 1 到 15的中断,均受FreeRTOS管理,0是最高优先级不受FreeRTOS管理。 Parameter Description: |
1.2 Task and Queues
Priority:任务优先级。STM32Cube对FreeRTOS进行了一些修改,优先级只有7个,优先级从低到高依次是:osPriorityIdle(空闲任务/任务优先级为0)、osPriorityLow、osPriorityBelowNormal、osPriorityNormal、osPriorityAboveNormal、osPriorityHigh、osPriorityRealtime;
2.有关时钟配置
2.1两个时基
转资料2:[FreeRTOS]请教大家关于新版本CubeMX生成FreeRTOS时选择时基的问题 http://bbs.armfly.com/read.php?tid=18289&page=e
我也使用生成的代码,这个问题我估摸着是这样的。
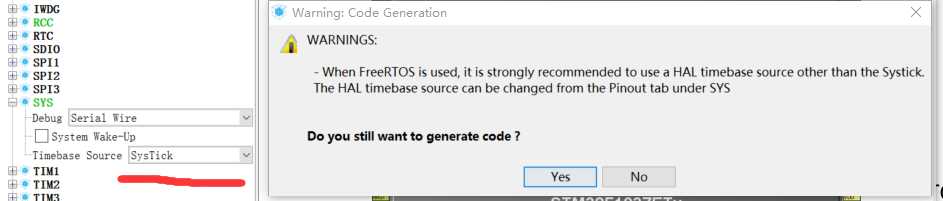
第一 FreeRTOS 肯定使用的是 systick 
第二 提到的 recommended to use a timebase other 应该说的HAL_IncTick() 还是需要用到的;由于FreeRTOS使用了systick ,所以推荐使用其他的时基源来IncTick
至于为什还要HAL_IncTick()?? 原来在这里
这个是 HAL_CAN_Transmit() 其中的一段。。 。
问题:
1.当 时,
时,
2当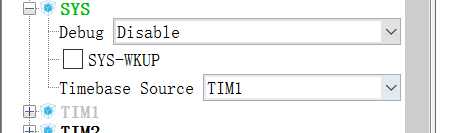 时,(无论LIBRARY_LOWEST_INTERRUPT_PRIORITY和LIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY怎么设置都如下)
时,(无论LIBRARY_LOWEST_INTERRUPT_PRIORITY和LIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY怎么设置都如下)
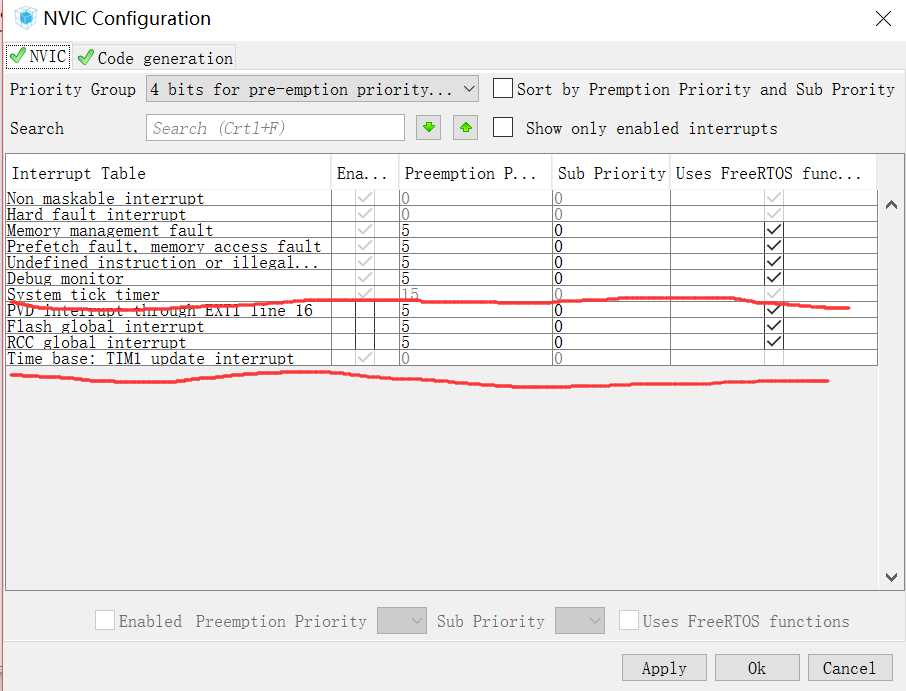
转:systick中断优先级为15,是否会导致延时不准确?http://www.openedv.com/forum.php?mod=viewthread&tid=269893
我觉得是的,比如串口的中断抢占优先级设成6(优先级分组是4),那么串口中断服务函数里的处理就要干净利索,所谓快进快出,否则耽误systick的延时处理。 但是应用任务无论优先级多少,都不会对Systick的处理造成影响。
总结,HAL库函数如CAN通讯用的是HAL_IncTick(),而HAL_IncTick()是CubeMX的TimeBase配置的,这个时候如果需要实时响应,则TimeBase最好为最高优先级0,即根据CubeMX推荐的设置TimeBase为TIM1提供。而原先裸机的HAL系统时钟用的Systick,现在Systick用到FreeRTOS上的调度,所以要求Systick为最低优先级15,这样可以保证systick不会对进程造成影响,仅存在延时。而消除延时的手段并不是提高systick的优先级,而是让中断服务程序更快。
转载:资料
1.FreeRTOS操作系统配置参数说明 . 金涛 https://wenku.baidu.com/view/0289379d8ad63186bceb19e8b8f67c1cfad6eef5.html
2.[FreeRTOS]请教大家关于新版本CubeMX生成FreeRTOS时选择时基的问题 http://bbs.armfly.com/read.php?tid=18289&page=e
以上是关于[FreeRTOS入门] 1.CubeMX中FreeRTOS配置参数及理解的主要内容,如果未能解决你的问题,请参考以下文章