探索之路机器人篇-根据3D文件来优化自己的机器人模型
Posted ynxf
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了探索之路机器人篇-根据3D文件来优化自己的机器人模型相关的知识,希望对你有一定的参考价值。
此章节不是必须做的!!!!
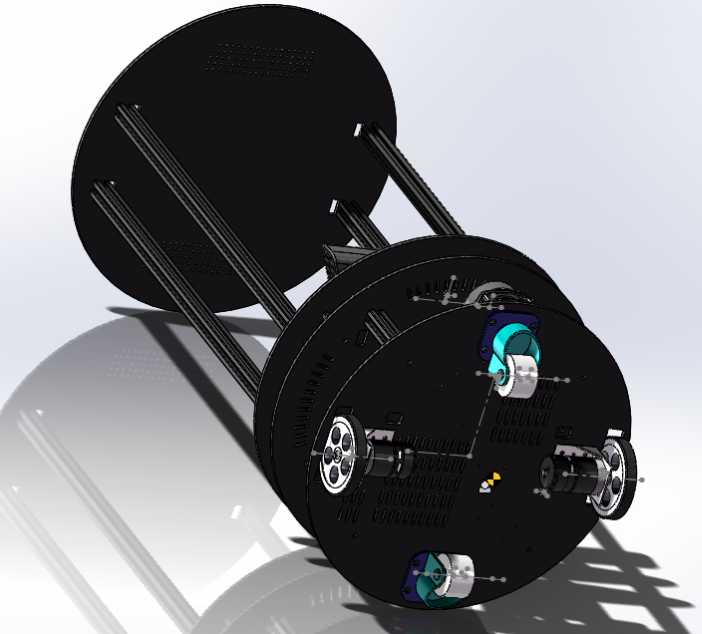
因为我已经用solidworks画了机器人的3D模型,那我就直接导入已经画好的三维模型。
如果大家没有画也是可以直接使用上一章节我们已经构建的机器人模型。我这里只是一个对显示的优化,不会影响后续功能的测试。
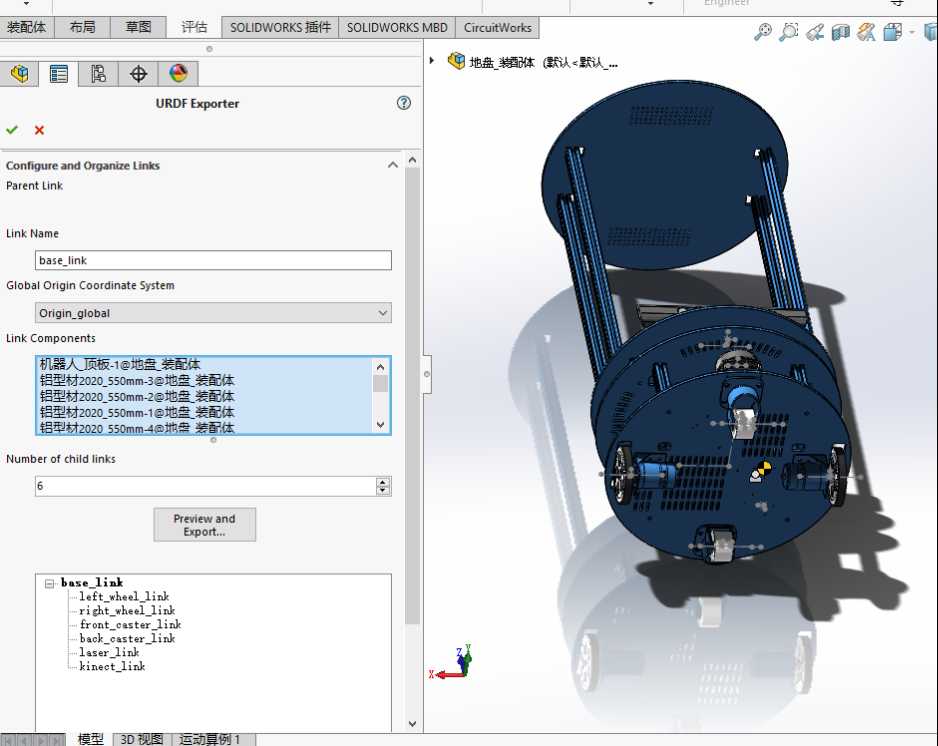
我们之前已经画好了三维模型,那么我们如何将solidworks中的模型导入到urdf中呢?我在百度上查到了solidworks有一个插件(sw2urdfSetup.exe),可以直接将三维模型生成ros的package。这个插件是ros提供的,但是在生成的package中有些配置是提供的模板,直接编译会报错,需要略微修改一下,具体修改教程我们可以搜索一下。
博文:【ROS学习】Solidworks模型转化为URDF文件格式+三连杆机械臂示例+逆运动学
这里我提醒一下,我使用的是solidworks 2017版。在上面的博文中,插件的file是在菜单栏中,而在我的软件中却在工具的标签下,这里需要注意一下。
而且在我实际的测试中,发现转轴可以不手动设置,它能自己识别并添加,但最好加上联动的方式,这样才能更好的识别。自动生成的坐标系的基准点有点儿乱,可以在软件自动生成之后手动修改一下。
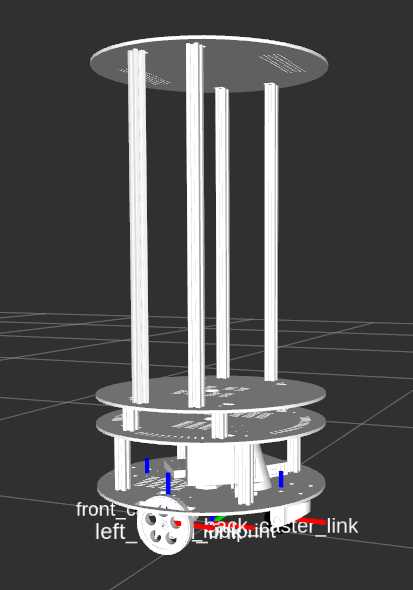
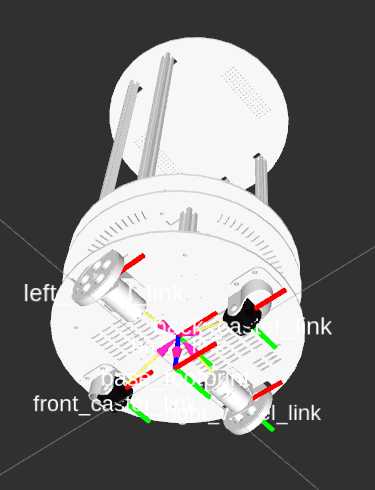
在生成的ros的package中,发现urdf加载的stl模型文件,但是注意,这里的stl文件是通过sw2urdfSetup.exe插件生成的,如果直接将三维图像保存为STL格式的话是无法正常显示的。
我们可以看一下在solidworks中的界面。我刚刚重新对万向轮的3D图纸做了一下优化。

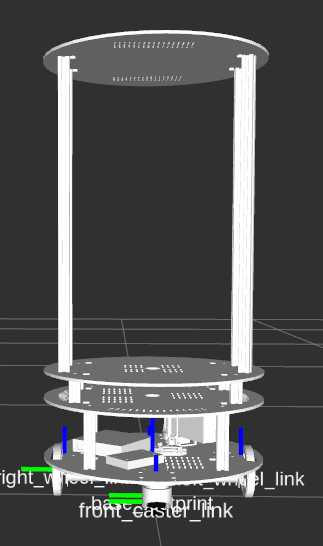
我们也可以在rviz中看一下效果。
目前,此版本的机械图纸和代码已经上传保存,编号是V4.
以上是关于探索之路机器人篇-根据3D文件来优化自己的机器人模型的主要内容,如果未能解决你的问题,请参考以下文章