探索之路机器人篇-ROS系统并创建工作空间和项目
Posted ynxf
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了探索之路机器人篇-ROS系统并创建工作空间和项目相关的知识,希望对你有一定的参考价值。
在ROS官网,已经给出了详细的教程。下面我就般一下砖,把相应的操作写到这里。官方网址:http://wiki.ros.org/cn/
安装ROS系统
indigo在ubuntu上的安装教程。官网:http://wiki.ros.org/cn/indigo/Installation/Ubuntu
1. 添加sources.list
配置你的电脑使其能够安装来自 packages.ros.org的软件。 ROS Indigo 仅 支持 Saucy (13.10) 和 Trusty (14.04)。
sudo sh -c ‘echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list‘
如果你觉得你的下载速度太慢或者是无法下载,可以使用国内的源. http://wiki.ros.org/ROS/Installation/UbuntuMirrors
2. 添加 keys
sudo apt-key adv --keyserver hkp://pool.sks-keyservers.net --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
3. 安装ROS系统
首先,要保证Debian软件包索引是最新的
sudo apt-get update
然后安装(注:桌面完整版里面包含了各个工具和软件包,桌面完整版中包含了基础班。基础班只有核心的软件包和工具,无rqt、rviz等工具)
sudo apt-get install ros-indigo-desktop-full (桌面完整版安装)
sudo apt-get install ros-indigo-ros-base (基础版安装)
4. 初始化rosdep
sudo rosdep init
rosdep update
5. 设置环境
echo "source /opt/ros/indigo/setup.bash" >> ~/.bashrc
source ~/.bashrc
6. 安装 rosinstall
sudo apt-get install python-rosinstall
至此,ros的安装已经完成,如果您安装的过程中出现问题,可以将出错的那一行拿到百度中搜索查找一下解决方案。
7. 安装测试
重新打开一个终端,并执行roscore,如果未出现红色错误并出现以下情况则代表安装成功。
创建ROS工作空间
ros的工作空间创建其实很简单,就相相当于用编译器编译一次文件。
但是编译器所执行的文件目录下必须由src文件。所以创建ROS工作空间的步骤就是,找一个目录,在里面新建一个src文件件,然后编译,编译工具会自动生成工作空间需要的文件。
mkdir -p ~/catkin_ws/src #创建目录
cd ~/catkin_ws/ #进入到目录中,确保有src目录
catkin_make #编译
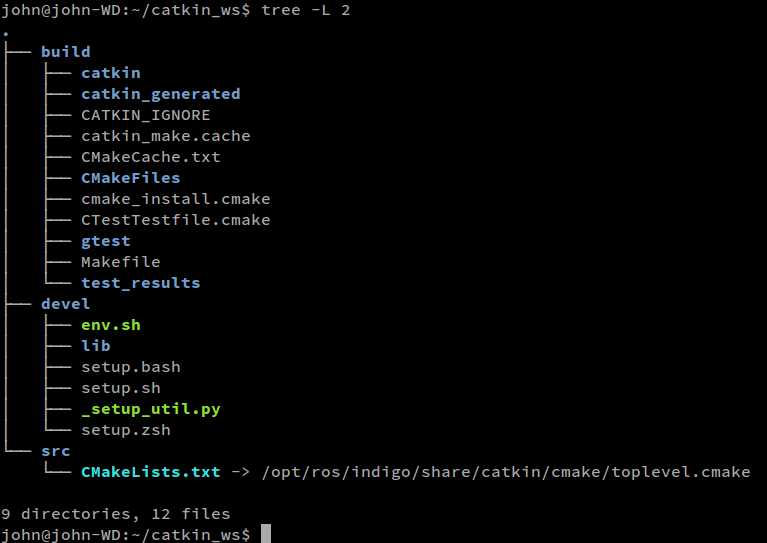
可见,执行编译工作后,我们的目录中多了 build 和 devel子目录,并多了好多文件,在src目录中多了一个CMakeLists.txt文件,这就是编译器自动创建的,也就创建了一个新的工作空间catkin_ws。
工作空间目录如下:
为了能让ros系统发现我们的新的工作空间,我们需要设置设置一下环境变量,这样ros系统才能找到我们以后创建的包文件。
source ~/catkin_ws/devel/setup.bash
为了避免以后每次打开终端都要执行上面这句话,我们可以将上面的语句添加到.bashrc文件中。
echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
这样,我们以后打开终端,直接操作就行了。
创建一个ROS程序包
首先,进入我们的工作空间的src目录中,我们的程序包必须放到工作空间的src目录中(也可以是子目录).
我创建一个mwRobot_description,用来描述我的mwRobot机器人。(catkin_create_pkg后的第一个参数是包名,后面是依赖)
catkin_create_pkg mwRobot_description std_msgs rospy roscpp urdf
这样,一个ros程序包就创建好了,我们编译一下,然后关闭终端在重新启动看看能不能识别到我的程序包。
创建程序包后要回到工作空间目录下,执行catkin_make,然后关闭终端重新打开,在终端上输入roscd mw 然后按tab建看看能否看到自己包的名字(mw是我创建包的前两个字母,你们自行替换)。
如果可以看到,则mwRobot_description包创建成功。
以上是关于探索之路机器人篇-ROS系统并创建工作空间和项目的主要内容,如果未能解决你的问题,请参考以下文章