排序算法之——快速排序(剖析)
Posted unicron
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了排序算法之——快速排序(剖析)相关的知识,希望对你有一定的参考价值。
对于快速排序,相信大家都有听过,这是一个被封为圣经的算法,足以体现算法的神奇的伟大。接下来本人将从算法思想、算法具体实现、不同情况下的复杂度、算法的优化和代码展示等几个方面为读者深入讲解。
一、算法思想
它的基本思想是进行一趟操作将数据分成两部分,左边的部分都比基准值小,右边的部分都比基准值大(非降序排序),再分别对两部分进行同样的递归操作。
了解二分查找的朋友应该很容易理解,不同的是,二分查找每次划分数据后只需对一边进行操作,所以它的速度更快(二分查找的复杂度为log2n,(是以2为底,n的对数))。
快速排序是对冒泡排序的改进(冒泡排序是对相邻的两个元素比较。快速排序是找到一个基准点,将数据划分成两部分,对两部分进行递归操作)
快速排序之所以快,是因为它采用了分治法的思想,把一个大的数据,分成多个小的块,对小的块进行处理,再将处理后的小块合并再处理。
二、算法具体实现(三种实现)
1、前后指针法(重点介绍)
把前后指针法放到最前面,是因为它有独有的优势,由于指针只是单侧的移动,对于单链表等只支持单向移动的数据结构,它依然能派上用场(另外两种算法都需要两指针分别向后向前移动)。
①将数组最左的元素记为key,创建指针i和j,i指向数组最左边的元素,j指向i的下一位。
②比较array[j]和key:如果array[j]>key,j后移一位,i不动。若array[j]<key,交换i+1和j的值,ij同时后移一位。
③当j走到数组的末尾时,先执行②操作,再交换array[i]和key。
④对两边进行上述操作的递归操作。
一趟走完key左边的数都小于key,key右边的值都大于key,下面用一个例子来理解(希望读者能动手验证)。
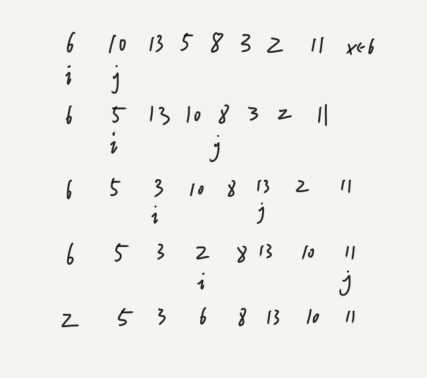
取key=6;
j走到5时,5<6,交换5和i+1,即交换5和10,ij同时后移一位。
j走到3时,3<6,交换3和i+1,即交换3和13,ij同时后移一位。
j走到2时,2<6,交换2和i+1,即交换2和10,ij同时后移一位。
j走到11时,11>6,不用交换,此时j到达数组末尾,交换key和i,即交换6和2。
一趟排序完成,6左边的元素都小于6,右边的元素都大于6。
2、左右指针法(非降序)
之所以叫左右指针,是因为初始的两指针是在数据的两端,看作左右,与前后指针法不同的是两指针是往中间移动的。
①将最右的元素定为key,左指针最左的元素,右指针指向最右的元素。
②右指针向左走,如果遇到了比key小的数,右指针停下,接着左指针往右走,遇到比key大的数时停下。交换左右指针的值,两指针再向中间移一位。
③检查两指针是否重合,不重合时进行②操作,重合时将key的值与重合位置的值交换。
④对两边进行上述操作的递归操作。
(放图说明)
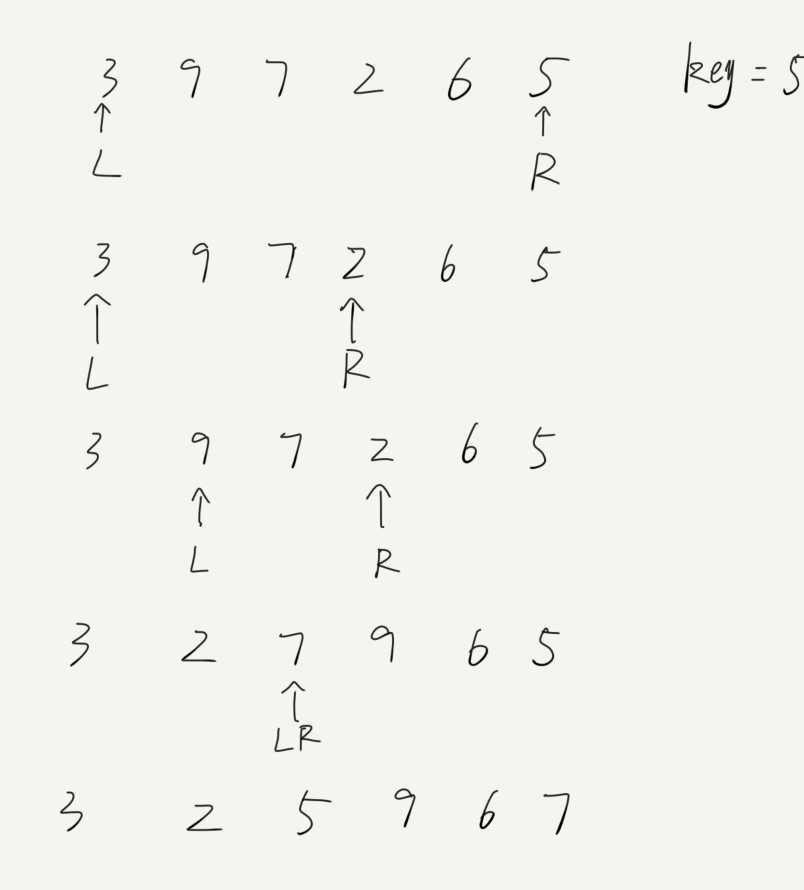
取key为5,初始化两指针。
右指针向左移动,到2时2<5,停住。
左指针向右移动,到9时9>5,停住。
交换两指针的值,两指针都向中间移动一位。
两指针相遇,交换key和指针位置的值,至此一趟排序完成。
3、填坑法(非降序)
填坑法的坑只有一个,是由指针指向且不断变化的,有些类似于左右指针法,具体不同会在下面分析。
①将数组最右的端定为坑,并记下坑值为key(一趟排序只记这一次),左指针最左的元素,右指针指向最右的元素。
②左指针向右移动,当遇到比坑值大的数时停下,将这个数填入坑中,将左指针此时的位置设为坑。右指针向左移,当遇到比key小的数时,将这个数填入坑中,将右指针此时的位置设为坑。
③判断两指针是否重合,若不重合执行②操作,重合就将初始的key值填入重合的位置。至此一趟排序结束。
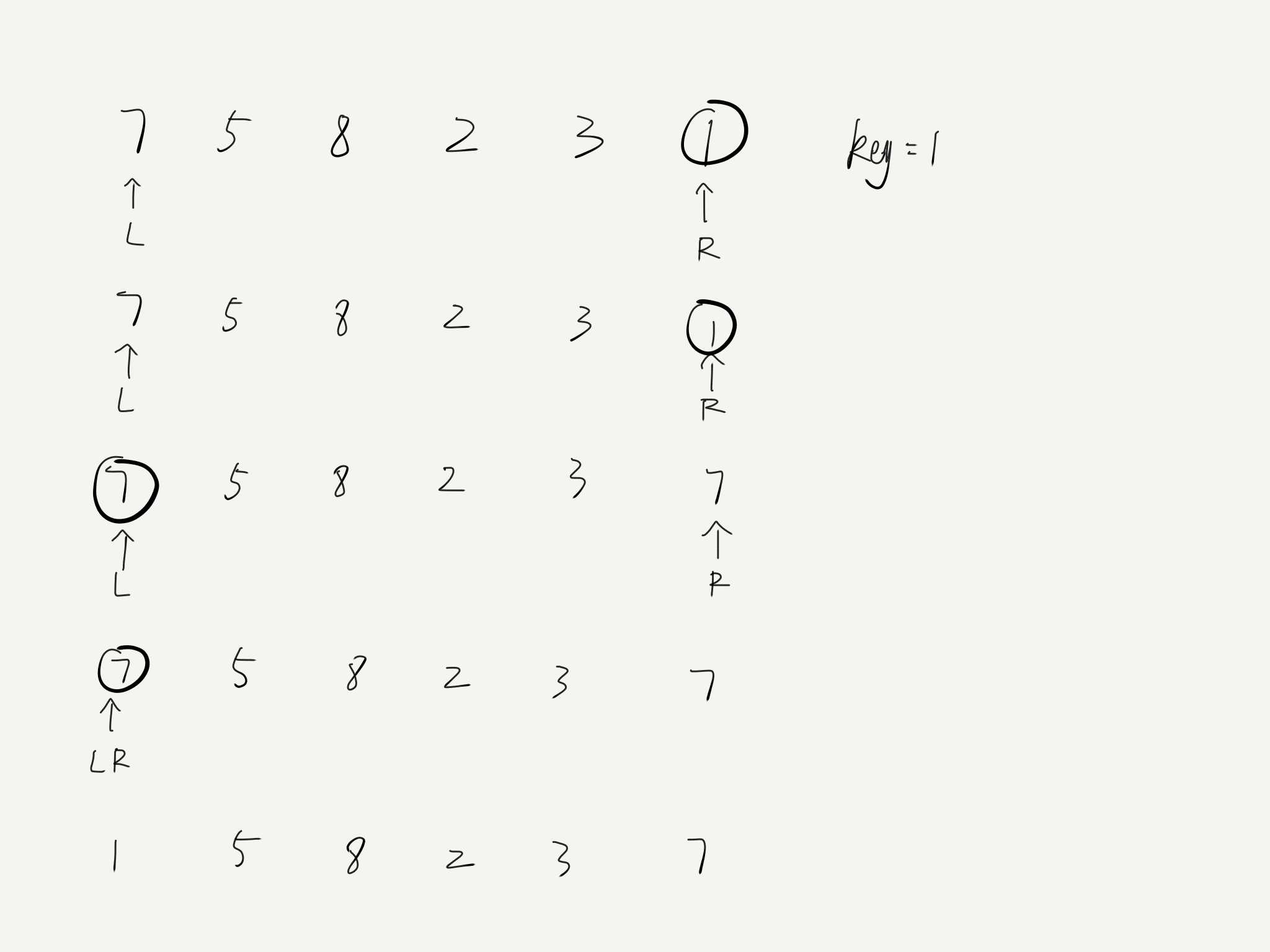
(上图中圈圈代表坑)
初始化两指针,将最右端设为坑,并记下其值。
左指针向右移动,一开始就发现7>1,将7填入坑中,左指针停留。
右指针向左移动,一直到7都没有找到比1小的数,这时两指针重合,将key值填入重合位置。
(这只是一种特殊情况,请读者自己作更多的数组来练习)
三种方法比较:
指针移动方向:前后指针法比较特别,两指针都是朝一边移动(另外两个方法两指针移动方向不同)。
两指针的完成顺序:左右指针法是两指针都移动到位了,才执行交换,填坑法只要一个指针到位了就执行交换。
两指针的作用:可以说左右指针法和填坑法是相同的。而前后指针法中一个指针决定了插入的位置,一个指针用来检索元素。
最后key值的插入:前后指针法是后指针到头后,交换key值和array[i](也就是前一个指针指向的值)。左右指针法和填坑法都是在两指针相遇后将key值与指针重合位置的值交换。
三、复杂度(要想透彻理解务必看完)
通常情况下,算法在不同情况的复杂度是不同的,对于快排,是否也是这样?下面我将对多种情况下的快排进行分析。
1、最优情况
根据快排的分治法思想,每次用key值将数组分为两部分,试想怎样才算是最优情况?
当key值每次都是放在最中间时,数据被分成均匀的两半,这时就出现了最优情况。
让我们看一眼递归树:
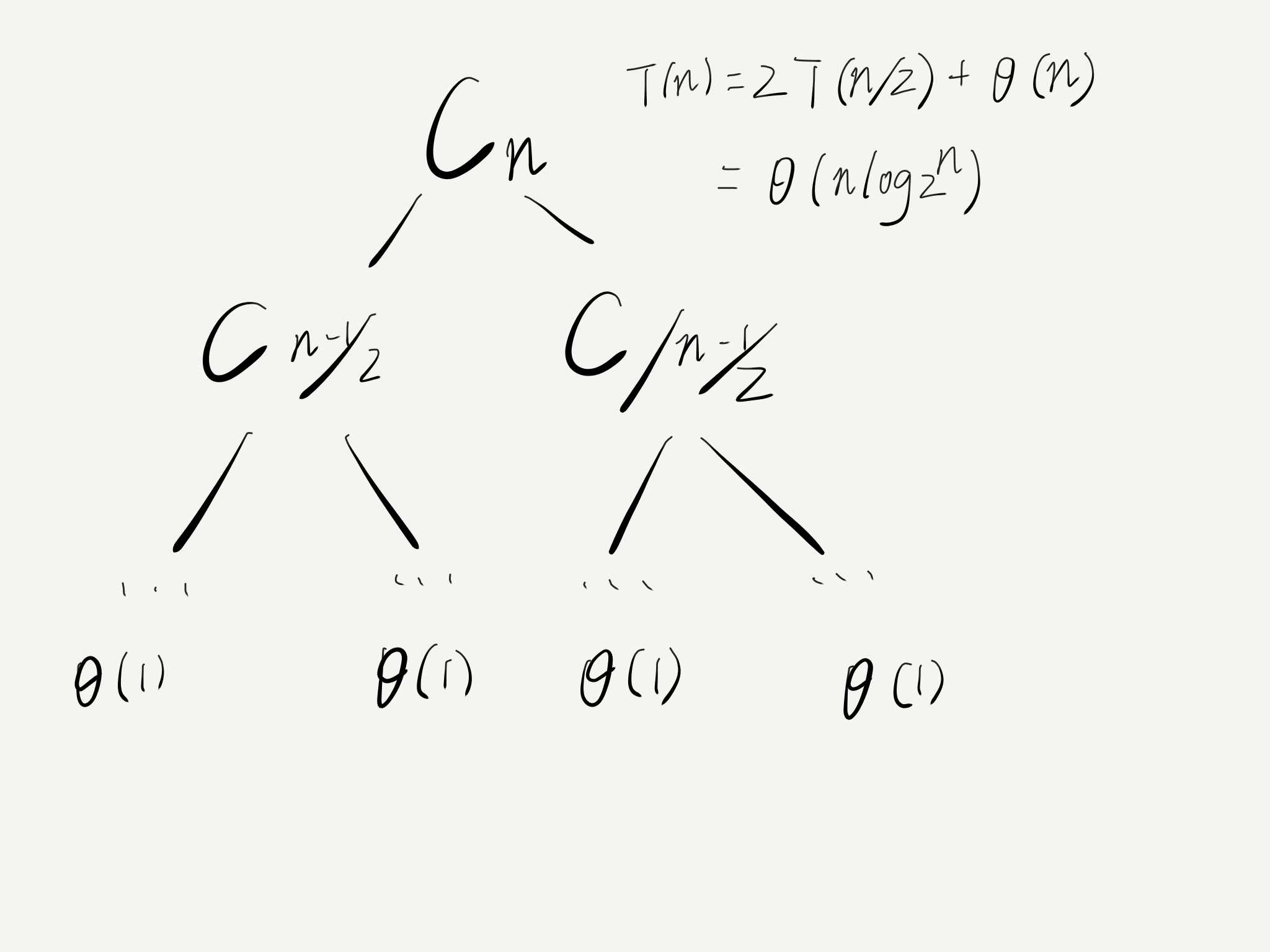
得出在最优情况下快排的复杂度是nlgn
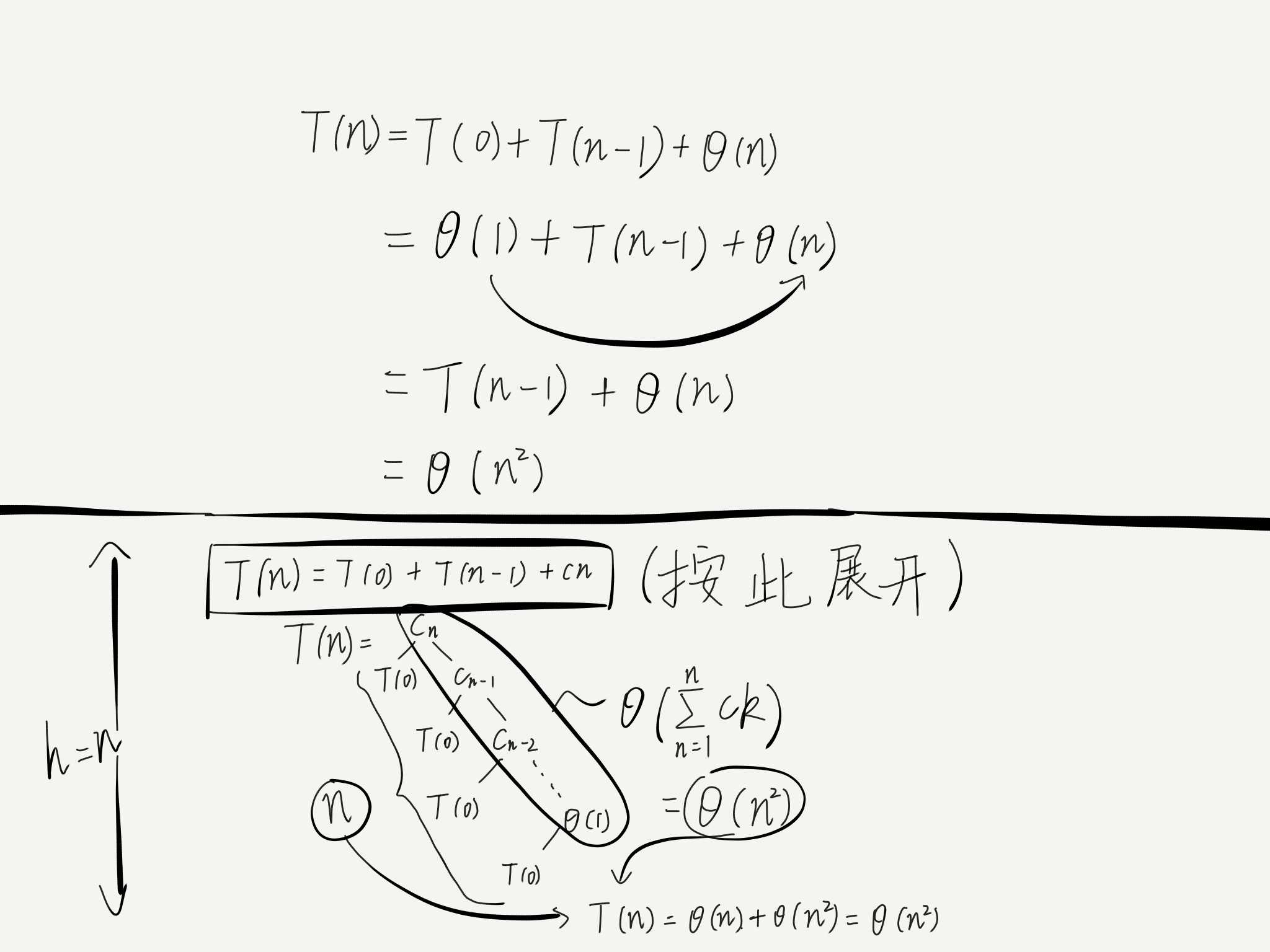
2、最坏情况
了解的最优情况,想一下最坏情况的样子吧。
对于一组排序好的数组,我们一般不去验证它是否排好,而是将它重新排一遍。想象一下用快排处理一组已经排好的数据,每次的key值不是最大就是最小,划分的两部分,一部分没有元素,剩下的n-1都在另一部分。这是很糟糕的情况,此时排序的效率大幅降低。
这时快排的复杂度达到了n²(对计算有疑问请在评论区提出)
3、固定位置排序
若每次排序key都被放在1/10或9/10的位置呢?请读者参考上面的方式作出分析。
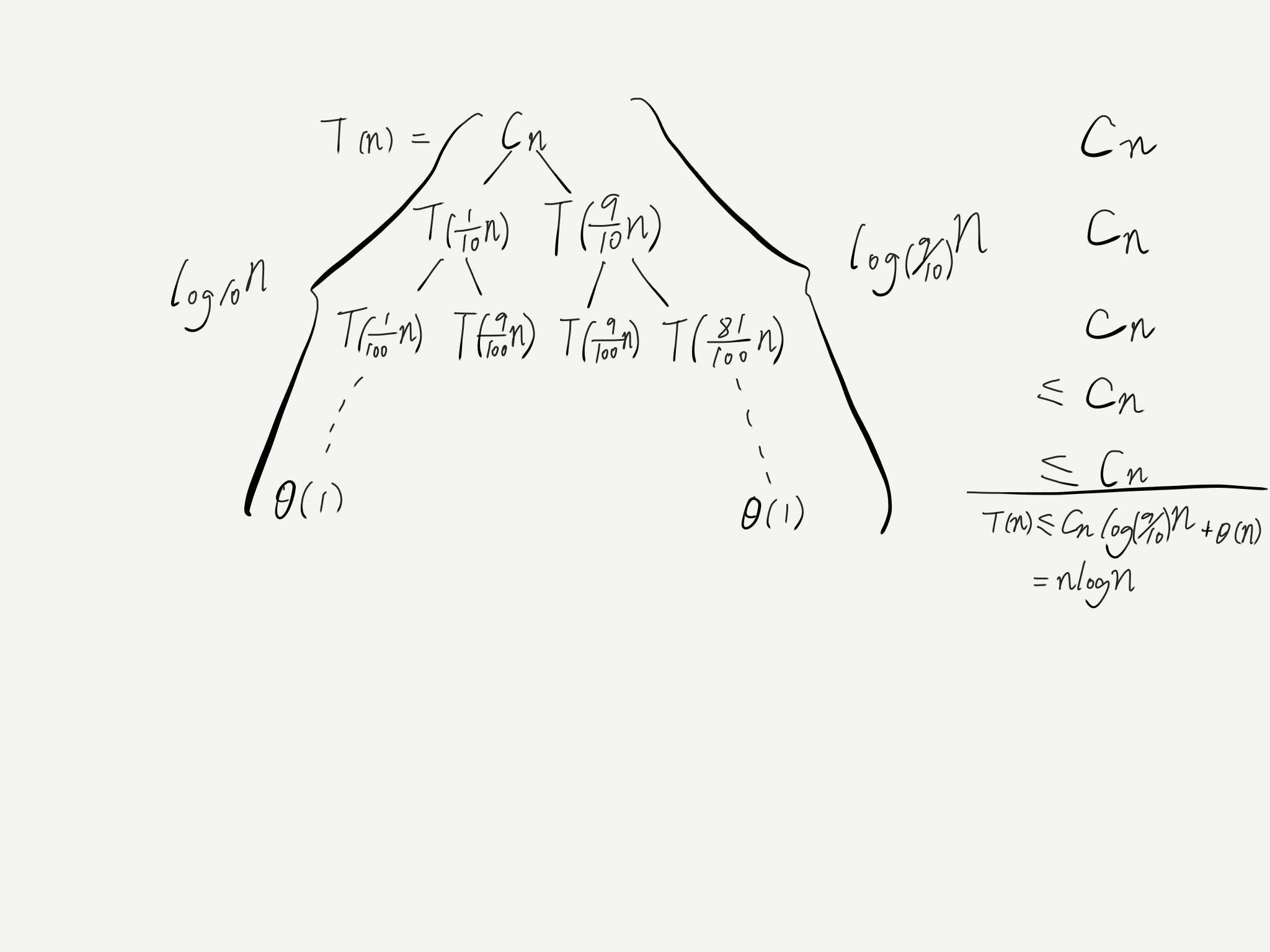
需要注意的是上图标注的两条路径的长度是不一样的(1/10的路径更短),所以在右边每层的相加后面出现小于Cn。
大家应该注意到,在T(n)的算式中没有出现1/10,Cnlog(9/10)n中log(9/10)n代表的是最长路径,Cn是每层的相加,而θ(n) 表示的是所以叶节点。
可以得出即使在固定位置的时候,我们依然是处于最优情况。
4、优劣交替排序
发挥想象力,如果在排序时,出现了第一次是最优排序,第二次是最差排序,第三次又回到最优排序...
这时对于整个排序而言,我们到底是在经历最差情况还是最好情况?(请读者在心中给出答案)
利用之前的分析和算式,给出下图:
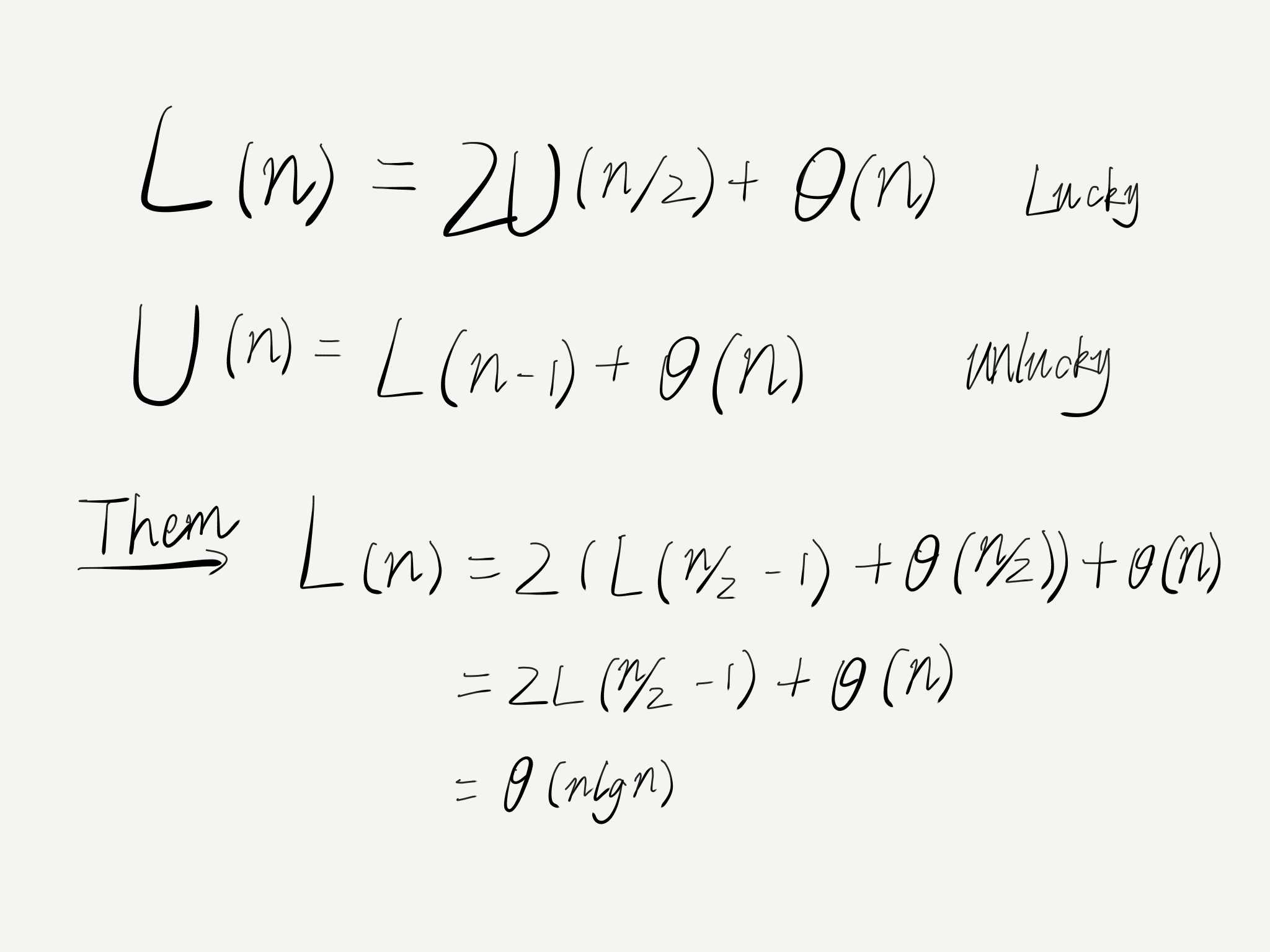
them中的式子用了等价代换(只是将n/2带入U(n))
你猜对了吗,不管猜对与否,你已经对算法有了深刻的认识。除了最坏情况外,快排的复杂度都是一样的。
四、算法的优化
鄙人才疏学浅,在这里只提供两个简单的方法供大家参考。算法的思路都很简单,具体的实现在后面代码展示部分。
1、三数取中法
在上面的各种情况中,我们不难看出排序的好坏受制于key值,如果我们不选最大或最小的数作为key,那么就可以避开最坏情况,三数取中法就利用了这种思想。
做法:在数组的头、中和尾各取一个元素,将三个数进行比较,选择位于中间的一个数作为key。
2、加入插入排序
当排序进行到接近完成时,数组会被分得很小,这时我们可以用一些特定的算法对这些小块排序,插入排序正适用于这种情况(复杂度为O(n²))。
做法:遍历数组,每次将当前元素插入合适的位置。
五、代码展示
1、前后指针法
1 #include<iostream> 2 using namespace std; 3 #include<assert.h> 4 int GetMidIndex(int *a,int left,int right); 5 int PartSort(int *a,int left,int right); 6 void QuickSort(int *a,int left,int right); 7 void InsertSort(int* a,int n); 8 void printArray(int *a,int n); 9 int main() 10 { 11 int arr[] = { 1, 3, 6, 0, 8, 2, 9, 4, 7, 5 }; 12 //int arr[] = { 49, 38, 65, 97, 76, 13, 27, 49 }; 13 int n = sizeof(arr) / sizeof(arr[0]); 14 cout << "进行快速排序后:"; 15 QuickSort(arr, 0, n - 1); 16 printArray(arr, n); 17 system("pause"); 18 return 0; 19 } 20 21 int GetMidIndex(int *a,int left,int right) 22 {//三数取中法 23 int max,maxAdress; 24 int mid=left+(right-left)/2; 25 if(a[left]>=a[mid]){ 26 max=a[left]; 27 maxAdress=left; 28 } 29 else{ 30 max=a[mid]; 31 maxAdress=mid; 32 } 33 if(a[right]>max){ 34 max=a[right]; 35 maxAdress=right; 36 } 37 } 38 39 int PartSort(int *a,int left,int right) 40 {//前后指针法的实现 41 int mid=GetMidIndex(a,left,right); 42 swap(a[mid],a[left]); 43 int key=a[left]; 44 int j=left+1; 45 int i=left; 46 while(j<=right&&i<j){ 47 if(a[j]<key&&++i!=j){ 48 swap(a[i],a[j]); 49 } 50 j++;//如果最后一个也比key小,j就会超出数组 51 } 52 swap(a[left],a[i]);//交换key值和array[i] 53 return i; 54 } 55 56 void QuickSort(int *a,int left,int right) 57 {//快排主要思想(分治法 58 if(left>=right){ 59 return; 60 } 61 if((right-left)<5){ 62 InsertSort(a,right-left+1); 63 } 64 int div=PartSort(a,left,right); 65 QuickSort(a,left,div-1); 66 QuickSort(a,div+1,right); 67 } 68 69 void InsertSort(int* a,int n)//当数组规模较小或者存在多个局部有序的子数组时,算法的执行速度会更快 70 {//插入排序 每次将一个元素插入以排好的序列 71 for(int i=1;i<n;i++){ 72 for(int j=i;j>0&&a[j]<a[j-1];j--){ 73 swap(a[j],a[j-1]); 74 } 75 } 76 } 77 void printArray(int *a,int n) 78 { 79 for(int i=0;i<n;i++){ 80 printf("%d ",a[i]); 81 } 82 }
2、左右指针法
#include<iostream> using namespace std; #include<assert.h> int PartSort(int* array,int left,int right); void QuickSort(int* array,int left,int right); int GetMidIndex(int* a,int left,int right); void InsertSort(int* a,int n); void PrintArray(int* a,int n); int main()//快速排序(填坑法) { int arr[]={1,4,2,7,8,5,3,9,0,6}; int n=sizeof(arr)/sizeof(arr[0]); QuickSort(arr,0,n-1); PrintArray(arr,n); system("pause"); return 0; } int PartSort(int* array,int left,int right) { int mid=GetMidIndex(array,left,right); swap(array[mid],array[right]); int key=array[right]; while(left<right){//除第一次外,left和right都是从坑开始移动 while(left<right&&array[left]<=key){ ++left; } array[right]=array[left]; while(left<right&&array[right]>=key){ --right; } array[left]=array[right]; } array[right]=key; return right; } void QuickSort(int* array,int left,int right) {//快排核心思想(分治法 if(left>=right){ return; } if(right-left<=5){ //printf("insert!"); InsertSort(array,right-left+1); } int div=PartSort(array,left,right); QuickSort(array,left,div-1); QuickSort(array,div+1,right); } void InsertSort(int* a,int n)//当数组规模较小或者存在多个局部有序的子数组时,算法的执行速度会更快 {//插入排序 每次将一个元素插入以排好的序列 for(int i=1;i<n;i++){ for(int j=i;j>0&&a[j]<a[j-1];j--){ swap(a[j],a[j-1]); } } } void PrintArray(int* a,int n) { for(int i=0;i<n;i++){ printf("%d ",a[i]); } } int GetMidIndex(int *a,int left,int right) {//三数取中法(序列是正序或者逆序时,每次选到的枢轴都是没有起到划分的作用。快排的效率会极速退化。 assert(a); int max,maxAdress; int mid=left+(right-left)/2; if(a[left]<=a[right]){ if(a[mid]<a[left]){ return left; } else if(a[mid]>a[right]){ return right; } else{ return mid; } } else{ if(a[mid]<a[right]){ return right; } else if(a[mid]>a[left]){ return left; } else{ return mid; } } }
3、填坑法
#include<iostream> using namespace std; #include<assert.h> int PartSort(int* array,int left,int right); void QuickSort(int* array,int left,int right); int GetMidIndex(int* a,int left,int right); void PrintArray(int* a,int n); int main()//快速排序(填坑法) { int arr[]={1,4,2,7,8,5,3,9,0,6}; int n=sizeof(arr)/sizeof(arr[0]); QuickSort(arr,0,n-1); PrintArray(arr,n); system("pause"); return 0; } int PartSort(int* array,int left,int right) { int mid=GetMidIndex(array,left,right); swap(array[mid],array[right]); int key=array[right]; while(left<right){//除第一次外,left和right都是从坑开始移动 while(left<right&&array[left]<=key){ ++left; } array[right]=array[left]; while(left<right&&array[right]>=key){ --right; } array[left]=array[right]; } array[right]=key; return right; } void QuickSort(int* array,int left,int right) { if(left>=right){ return; } int div=PartSort(array,left,right); QuickSort(array,left,div-1); QuickSort(array,div+1,right); } void PrintArray(int* a,int n) { for(int i=0;i<n;i++){ printf("%d ",a[i]); } } int GetMidIndex(int *a,int left,int right) {//三数取中法(序列是正序或者逆序时,每次选到的枢轴都是没有起到划分的作用。快排的效率会极速退化。 assert(a); int max,maxAdress; int mid=left+(right-left)/2; if(a[left]<=a[right]){ if(a[mid]<a[left]){ return left; } else if(a[mid]>a[right]){ return right; } else{ return mid; } } else{ if(a[mid]<a[right]){ return right; } else if(a[mid]>a[left]){ return left; } else{ return mid; } } }
以上是关于排序算法之——快速排序(剖析)的主要内容,如果未能解决你的问题,请参考以下文章