论文阅读:FaceBoxes: A CPU Real-time Face Detector with High Accuracy
Posted ocean1100
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了论文阅读:FaceBoxes: A CPU Real-time Face Detector with High Accuracy相关的知识,希望对你有一定的参考价值。
2个挑战:
1)在杂乱背景下人脸视角大的变化需要人脸检测器精准的解决复杂人脸和非人脸的分类问题。
2)较大的搜索空间和人脸尺寸进一步增加了时间效率的需要。
传统方法效率高但在人脸大的视角变化下精度不够,基于CNN的方法精度高但速度很慢。
受到Faster R-CNN的RPN以及SSD中多尺度机制的启发,便有了这篇可以在CPU上实时跑的FaceBoxes。
(1)RDCL:Rapidly Digested Convolutional Layers,加速计算
- 缩小输入的空间大小:为了快速减小输入的空间尺度大小,在卷积核池化上使用了一系列的大的stride,在Conv1,Pool1,Conv2,Pool2上stride分别是4,2,2,2,RDCL的stride一共是32,意味着输入的尺度大小被快速减小了32倍。
- 选择合适的kernel size:一个网络开始的一些层的kernel size应该比较小以用来加速,同时也应该足够大用以减轻空间大小减小带来的信息损失。Conv1,Conv2和所有的Pool分别选取7*7,5*5,3*3的kernel size。
- 减少输出通道数:使用C.ReLU来减少输出通道数。
(2)MSCL:Multiple Scale Convolutional Layers,丰富感受野,使不同层的anchor离散化以处理多尺度人脸
将RPN作为一个人脸检测器,不能获取很好的性能有以下两个原因:
- RPN中的anchor只和最后一个卷积层相关,其中的特征和分辨率在处理人脸变化上太弱。
- anchor相应的层使用一系列不同的尺度来检测人脸,但只有单一的感受野,不能匹配不同尺度的人脸。
为解决这个问题,对MSCL从以下两个角度去设计:
-
- Multi-scale design along the dimension of network depth.如下图,anchor在多尺度的feature map上面取,类似SSD。
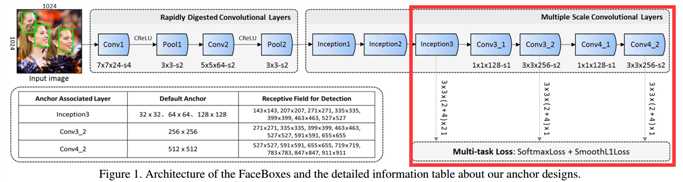
- Multi-scale design along the dimension of network width.使用inception模块,内部使用不同大小的卷积核,可以捕获到更多的尺度信息。
- Multi-scale design along the dimension of network depth.如下图,anchor在多尺度的feature map上面取,类似SSD。
(3)Anchor densification strategy:
以上是关于论文阅读:FaceBoxes: A CPU Real-time Face Detector with High Accuracy的主要内容,如果未能解决你的问题,请参考以下文章