分布式系统中的时间和顺序——关于Spanner中的Linearizability
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了分布式系统中的时间和顺序——关于Spanner中的Linearizability相关的知识,希望对你有一定的参考价值。
分布式系统中的时间和顺序——关于Spanner中的Linearizability
引言
随着信息科技的在人类生活中的不断***,数据规模和计算规模也与日俱增,某些问题已经无法在单机系统上进行处理,只能寻求分布式系统的解决方案。
分布式系统用多个设备来处理特定问题,但是如何保证这样的处理结果像单机系统那样正确?这里的正确指的是:以相同的顺序进行相同的一系列操作,分布式系统能得到和单机系统相同的结果。
概要
本文主要介绍了分布式系统中 Linearizability 概念,以及它与 Serializability 的区别,并介绍了 Spanner 中是如何通过 TrueTime 来实现 Linearizability。
Linearizability 的概念
如果一系列的操作并发交叉进行,最终形成的 history(可以理解为运行记录)与顺序执行这些操作形成的 sequential history 相同,而且这些操作的先后顺序仍然得到保留,那么这个 history 我们就称之为是 Linearizability 的 [1]。
我们假设现在有一个寄存器,具有 W 和 R 两个操作,比如 W(0)A 表示进程 A 往寄存器写入 0 这个值,R(0)B 表示进程 B 从寄存器读到 0 这个值。
现实中,操作从开始到结束是具有时延的,我们用 start[W(0)] 表示发起操作,end[W(0)] 表示请求结束。
假设现在有如下图所示的场景一:
该场景共有三个操作:
1.A 进程执行 W(1);
2.操作 1 进行的过程中, B 读取到 0 这个值, 用 R(0) 表示;
3.操作 1 和操作 2 都结束后, B 进程再次读取, 得到了 1 这个值, 用 R(1) 表示。
注意这三个操作中隐含的先后顺序:操作 1 先于操作 3,操作 2 先于操作 3。
这个并发执行的场景对应的 history 如下:
start[W(1)]A
start[R(0)]B
end[W(1)]A
end[R(0)]B
start[R(1)]B
end[R(1)]B
这个 history 可以找到一个等价的 sequential history:
start[R(0)]B
end[R(0)]B
start[W(1)]A
end[W(1)]A
start[R(1)]B
end[R(1)]B
而且这个 sequential history 中仍然保持了操作 1 与操作 3,操作 2 与操作 3 的先后顺序。因此场景一可以认为是 Linearizability 的。
再看如下的场景二,该场景并不满足 linearizable 的限制:
在这个场景中,当 B 执行 W(1) 的同时,A 已经读取到了 1 这个值,之后 C 执行 W(0),再之后 B 读取这个值,竟然还读取到 1 这个值。
分布式系统中,如果可以按照操作发生的先后顺序,构造一个 Linearizability 的运行记录,那么这个特性就称之为的 Linearizability。
举例来说,假设现在有一个全球部署的分布式存储系统,先后发生以下 4 个操作:
a. x = 1, 在中国发生
b. read x, 在美国发生
c. x = 2, 在日本发生
d. read x, 在美国发生
按照直觉来想, 操作 b 读取到的 x 值肯定是 1, 操作 d 读取到的 x 值肯定是 2。但这一切都是建立在系统能够感知这些操作的先后顺序之上, 比如在操作 b 中, 坐落于美国的 server 可以意识到操作 a 已经先发生。
但是在现实的分布式场景中, 我们的系统并不能像上帝一样, 可以清楚的知道世界各角落中, 每个操作的先后顺序, 除非我们为每一个操作都标记上统一的单调递增的 id, 这个 id 的功能一般由 timestamp 来充当。
但是对于 Spanner[2] 这样全球部署或者跨地域部署的系统, 如何来为事务分配 timestamp, 才能保证系统的响应时间在可接受的范围内? 如果整个系统采用一个中心节点来分配 timestamp, 那么系统的响应时间就变得非常不可控, 对于离中心节点隔了半圈地球的用户来说, 响应时间估计会是 100ms 级别。
所以, 本文会着重介绍 Spanner 分配 timestamp 的原理, 也即是 TrueTime API。
Linearizability 与 Serializability
需要注意的是 Linearizability 其实是无关于并发控制的, 它只是关于操作顺序的一种限制。与 Linearizability 很容易混淆的一个术语是 Serializability, 这个特性才是关于并发控制的一个限制。
如果一个系统可以将并发的事务按照某种调度,达到的效果和某种串行执行的效果一样(也就是各事务的操作不会相互交错),那么这个特性就叫 Serializability。
Serializability 着重于保证编程模型中的一些约束, 这些约束大部分是人为规定的. mysql 的默认 RR 隔离级别是没有保证 Serializability, 因为 RR 并不能防止 Lost Update 和 Write Skew 的发生, 这两种情况都会破坏一些约束, 具体请参考 Weak Isolation in Relational Databases[4]。
对于单机数据库系统,单机数据库系统维持一个统一的、递增的事务 id 是轻而易举的事情, 所以可以认为它们天生就是具有 Linearizability 特性。另外有些数据库系统, 比如 MySQL 所支持的 Serializable 隔离级别便是本文所说的 Serializability 的特性。
所以, 我们可以看到所谓的 Serializability 便是 ACID 中的 I, 至于 Linearizability, 是针对于分布式系统而言的一个难点。
Linearizability 的意义
现在的数据库系统, 都具有 Snapshot read 的概念, 所谓 Snapshot read 指的是对于系统的读操作, 只是过去某一时刻的一个快照, 也就是对应于该事务 id 所能看到的一份历史数据, 在 Spanner 的场景来说, 也就一个指定的 timestamp 所能看到的一份历史数据。
如果一个分布式系统能够对"历史"有所感知的话, 也就意味着能够感知操作的前后顺序, 也就是说这个系统支持 Linearizability。
如果一个分布式系统无法支持 Linearizability, 那么对于指定一个 timestamp 所能看到的历史数据, 每次可能是不一样。
举例来说, 假设现在有一个全球部署的分布式存储系统, 先后发生以下3个操作:
a. x = 1, 分配的 timestamp 为 s1
b. 指定 timestamp s2 执行 read x
c. x = 2, 分配的 timestamp 为 s3
d. 指定同一个 timestamp s2 执行 read x
假设 s2 > tabs(a),意思是 s2 是在操作 a 之后一个 timestamp,按照直觉来想, 肯定满足 s2 > s1 的关系式, 但是对于不支持 Linearizability 的系统来说, 可能存在 s2 < s1, 导致操作 b 这个 Snapshot read 无法看到 a 操作的结果。
类似, 还假设 s2 < tabs(c), 但是可能存在 s2 > s3, 导致操作 d 这个 Snapshot read 看到了 c 操作的结果。
注意, 操作 b 和 d 的都指定同一个 timestamp = s2 进行 Snapshot read,但是 b 和 d 看到的历史数据却是不一样的, 也就是说, 对于同一个 timestamp 对应的快照竟然不一样。
到这里可以看出来, 不支持 Linearizability 的分布式系统, Snapshot read 便无从谈起, Snapshot Isolation 也就是不可能的事情。
有些系统实现了"部分顺序", 也就是在单个节点(或者说单个分区)内的 Linearizability, 也就是能做到单机 Snapshot, 但是没有全局的 Snapshot。
实现 Linearizability 的难点
从上述描述中, 可以看到, 实现 Linearizability 首先需要对系统中每个事务分配一个统一的、单调递增的 id, 一般来说是 timestamp。那么, 在分布式系统中, 如何协调这个 timestamp 呢?
对于这个问题, 我们可能会很迅速的想到一个方案:引入一个专门生成 timestamp 的中心节点, 每次事务提交时, 访问该中心节点来获得 timestamp。TiDB 使用的便是这种方案, 它利用 TimeStamp Oracle 模块来提供授时服务。
但是这种方案引入了中心节点, 也意味着整套系统的部署不可能在地理位置上过于分散, 否则事务延时将会令人难以忍受。
需要指出的是,逻辑时钟(比如 Lamport 时钟和 Vector 时钟)无法实现 Linearizability, 因为它只能区分有"因果关系(也就是有通信)"的事件间的顺序。所以, 类似于" 事务 T2 在事务 T1 提交后才开始提交"这样的场景, 当节点间没有发生通信时,逻辑时钟无法区分这两个事务的顺序。
本文着重讲解 Spanner 是如何在这种全球部署的分布式系统中, 保证 Linearizability 的。在全球分布式系统中,真实世界里两个事务, 先后在不同的地方 commit, 系统怎样去如实反映事务的 commit 顺序?
首先我们先了解下 Spanner 的特性和它的整体架构。
Spanner 简介
Spanner 是由 Google 公司设计开发的一套可扩展、高可用、可全球部署的分布式数据库系统,具有如下特性:
- 提供了基于 SQL 的查询接口, 使用强类型的 schema, 提供了类型 RDS 的体验;
- 一定程度上支持垂直 sharding, 用户可以通过 INTERLEAVE 语法定义相关的两个 table 的记录存放在同一个 spanserver,带来的好处是形成了数据的 Locality, 对于查询中的一些操作(比如 join, group by)可以进行下推[3];
- 可以自动对数据进行水平 sharding, 并对每个 shard 维护一定的数量的副本, 通过 Multi-Paxos 保证一致性, 这些副本可以分散在全球不同地域;
- 支持 Snapshot Isolation, 通过 2PL 保证多个并发事务的 Serializability。另外, 对于涉及多个 shard 的 xa 事务, 通过 2PC 保证 Serializability;
- 保证 External Consistency(等价于 Linearizability, 下文不再区分), 也就是说如果事务 T1 提交后, 事务 T2 才开始提交, 那么 T2 的 timestamp 一定大于 T1 的 timestamp。
整体架构
Spanner 是由一系列的 zone 组成, zone 是 Spanner 中的部署的单元, 一般会在某 datacenter 部署一个 zone, 但是也可以有多个 zone。数据副本就是存放在这一系列的 zone 中, zone 之间的物理距离越大, 数据的安全性越高。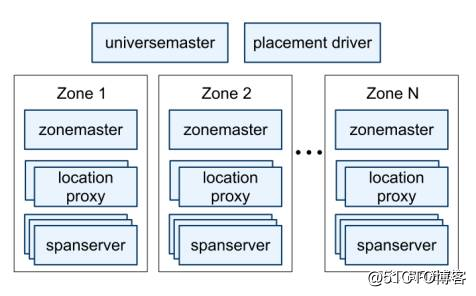
- universemaster:是一个控制台, 监控universe里所有zone状态信息, 用于debug;
- placement driver:帮助维持特定副本数量,自动搬迁数据,实现负载均衡;
- zonemaster:管理 spanserver 上的数据;
- location proxy:作用不详, 可能是为 client 提供数据的位置信息, client 要先访问它来定位需要访问的 spanserver;
- spanserver:对 client 提供服务, 包括读写数据。
Spanserver 架构
每个 spanserver 负责管理 100 ~ 1000 个 tablet。
一个 tablet 是维护某个表的一部分数据, 比如一个表有 10,000 行数据, 分成 100 个 tablet, 那么第 1 个 tablet 维护第 1 ~ 100 行数据, 第 2 个 tablet 维护第 101 ~ 200 行数据。
tablet 维护的数据是一系列的 KV: (key, timestamp) ---> value 。
可以看出, Spanner 的 KV 数据是和 timestamp 绑定的, 所以自然就是支持 multi-version。
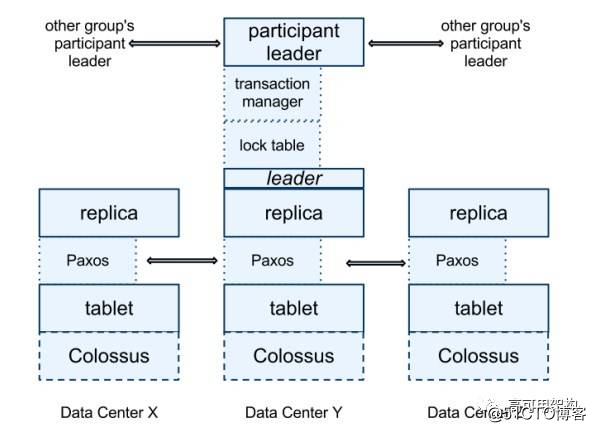
为了支持数据复制, spanserver 在每个 tablet 上层实现了 paxos group, 这个 group 中 replica 分布在不同的 zone 中。
每个 leader replica 还维护了一个 lock table, 也就是一系列的 KV: key--->lock-states。
lock-states 指的是对应的数据在2PL过程中的锁状态。
spanserver 在每个 leader replica 上都实现了 transaction manager, 这个模块是用来支持分布式事务的。
如果事务涉及到多个 paxos group, 那么每个 leader replica 此时就是 participant leader 的身份, 其中一个 participant group 会被 client 选作 coordinator, 通过 2PC 的方式来实现 Serializability。
如果事务只涉及一个 paxos group, 那么 transaction manager 的功能可以被忽略, 只依赖 lock table 就可以实现 Serializability。
事务 commit 的过程
简单的实现(但是有问题)
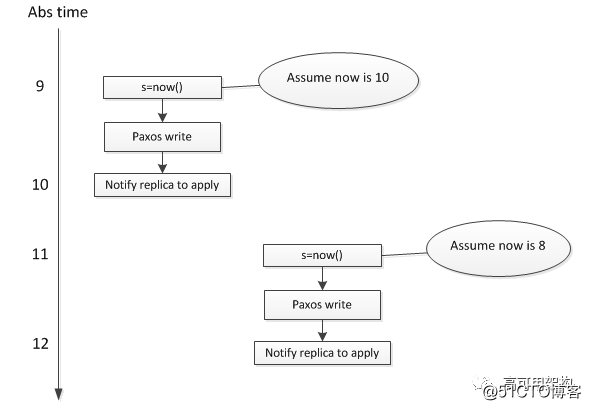
现在假设让我们来实现事务的 commit 过程, 有一种简单的方法如下图所示, 这种方法简单的从 local clock 分配 timestamp 给事务:
假设现在有先后两个事务 T1 和 T2, 分别在不同的 spanserver 上执行, T2 在 T1 提交后, 才开始提交, 使用这个方法会导致真实世界中后提交的 trx 反而具有较小的 timestamp。
这个问题出现的原因是, 两个事务所使用的 local clock 没有可比性, 无法真实反映两个 trx 的先后顺序: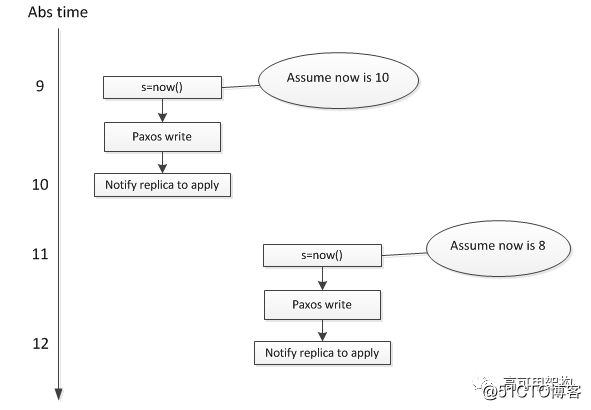
上图表明, T2 的 timestamp 是 8, T1 的 timestamp 是 10, 这个和真实世界的先后顺序是相反的,原因在于不同设备上的 clock 是没有可比性。
为了解决这个问题, 我们可能会很迅速的想到一个解决方案:引入一个专门生成 timestamp 的中心节点, 每次事务提交时, 访问该中心节点来获得 timestamp。
TiDB 使用的便是这种方案,但是这种方案引入了中心节点, 也意味着整套系统的部署不可能在地理位置上过于分散, 否则事务延时将会令人难以忍受。
Spanner 采用了另外一种方案:TrueTime。TrueTime 不但可以分配统一的具有可比性 timestamp 范围, 还支持系统的全球范围部署。
TrueTime
Spanner 的 TrueTime 是利用 GPS 时钟和原子钟实现的, 可以提供非常精确的时钟, 误差在 1ms~7ms 之间。
- TT.now() 返回一个区间[earlist, latest], 保证 abs time(绝对时间)是在区间以内;
- TT.after(t) 判断一个时间是否已经成为过去时, 是对 TT.now() 的简单封装:
return TT.now().earlist > t
TT.before(t) 和前者类似,判断时间是否是未来时。
TrueTime 实现
TrueTime 是通过以下架构实现的: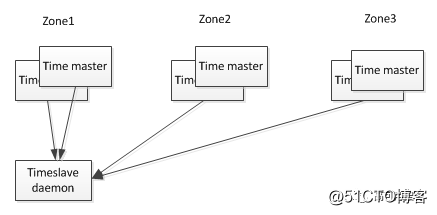
每个 datacenter 具有若干个 time master, 另外每台设备上运行有 timeslave 进程。前者是 Spanner 的时钟来源, 大部分是配备 GPS 接收器,剩下一小部分配备原子钟(防止 GPS 的天线故障或者频率干扰, 所以也叫"末日时钟")。
timeslave 以 30s 的间隔从 time master 同步时间。当 timeslave 需要校准 local clock 时, 从就近的 datacenter 和较远的 datacenter 的 time master 拉取时间信息, 并通过 Marzullo 算法[5]识别并丢弃异常的时间来源, 并将多个时间信息归并到一个统一的时间。
TrueTime API 的直接数据来源是设备上的 local clock,所以 TrueTime 的误差来源有:
1.从 time master 同步时的网络延迟, 导致的误差大概是 1ms;
2.local clock 的漂移, 这个误差是时间的锯齿函数, 校准后的一瞬间是 0, 校准前的一瞬间是最大值, 范围在 0~6ms。
所以 TrueTime 总的误差是 1~7ms, OSID12 论文表示平均是 4ms 左右。
网络延迟导致的误差如下图所示: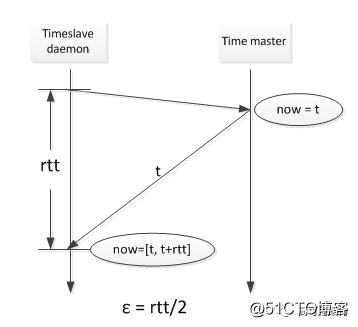
local clock 漂移导致的误差, 是因为环境温度,工作电压等因素导致的。Spanner 计算这个误差时, 已经按照最坏的漂移速度(200us/s)来计算的, 真实的差距可能是 local clock 提前了, 或者是 local clock 电压不够导致落后了。
为了保证 local clock 的漂移在 0 ~ 6ms 之内, 也就是漂移频率在 200us/s 之内, Spanner 实现了漂移频率异常的设备从集群中剔除的功能。
Commit Wait
利用 TrueTime, Spanner 可以保证整个分布式系统中,所有事务分配到的 timestamp 都是具有可比性的, 基于同一个参考系的。
Spanner 在 TureTime 的基础上,还引入一个 Commit Wait 的限制,保证了 External Consistency, 也就是保证了如下规律:
如果事务 T2 在事务 T1 提交后, 才开始提交, 那么 T2 的 commit timestamp 肯定大于 T1 的 commit timestamp。
这个限制是一个很关键的地方是, Commit Wait:
等待 T1 的 timestamp s 成为过去时, 才提交事务(也就是通知其他replica进行重放,回复ack给用户), 也就是保证事务 commit 的绝对时间大于 s, 有了 Commit Wait 之后就可以保证了 External Consistency, 证明如下: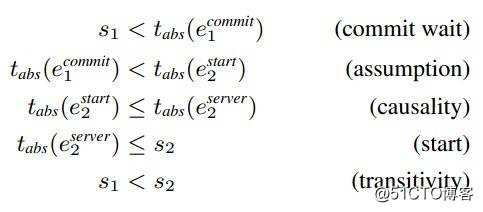
因此, 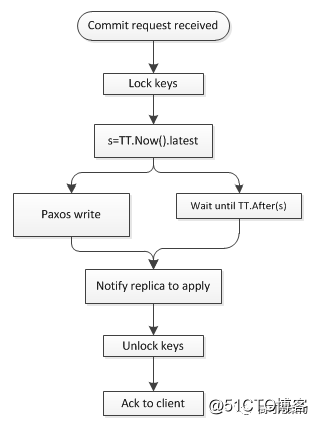 Spanner 的 read-write 事务提交时的步骤如下:
Spanner 的 read-write 事务提交时的步骤如下:
首先, replica leader 接受收到 client 的 commit request 后, 会锁住相应的 key, 然后分配 TT.now().latest 作为事务的 timestamp s。
因为 TT.now() 保证了 abs time 是在区间内的, 所以这个 s 是未来时, 需要进行 Commit Wait, 等待 s 成为过去时后, 再进行提交, 用于保证 External Consistentency。
假设 s = t1 + ε1, 进行 Commit Wait 之后是 Now() = t2 ± ε2。
由于 t2 - ε2 >= t1 + ε1, 所以 Commit Wait 所消耗的时间等于 t2 - t1 >= ε1 + ε2, 也就是等待时间至少是平均误差的 2 倍, 约 8ms(OSDI12 的论文中表示 Commit Wait 的时间大多数情况和 Paxos write 的时间是重叠的)。
关于 External Consistency 的示例如下, 假设图中事务 T1 所在的 spanserver 的误差是 1, 事务 T2 所在的 spanserver 误差是 2: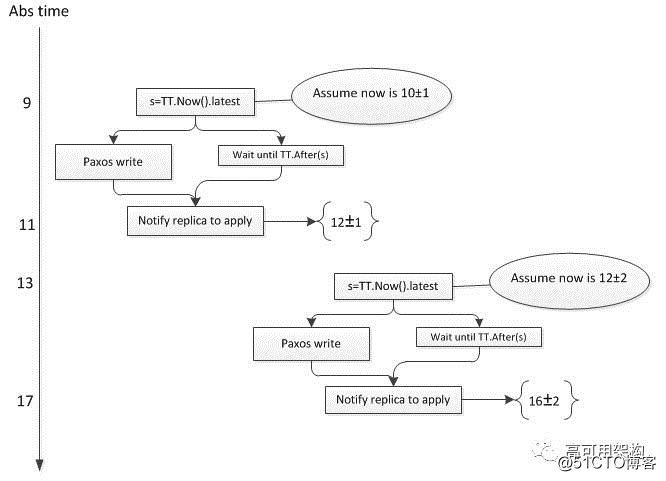
Spanner 保证了 T1 的 timestamp = 11 小于 T2 的 timestamp = 14。
注意图中纵坐标不是随意标注的, 而是注入了一定的限制在这里:刻度11 >= T1 的 timestamp, 而且 T2 的 timestamp >= 13。
Spanner 巧妙的通过 Truetime 和 Commit Wait, 保证了 T1 的 timestamp < T2 的 timestamp。
Snapshot read
Snapshot read 指的是读取过去时间的某个快照, 无需加锁。
client可以指定一个 timestamp t, 或者时间范围,Spanner 会寻找一个数据充分更新好的 replica 来提供读服务。
所谓数据充分更新好, 是指 t <= tsafe,其中 tsafe 定义如下:
前者指的已经提交的事务 timestamp, 后者指的是正在 2PC 过程中未决的事务 timestamp - 1。
如果 t > tsafe,Spanner 需要等待 replica 一段时间, 待 tsafe 推进后再进行读操作。
基于 External Consistency 特性,Spanner 可以感知操作的先后顺序, 给定一个时间戳 t, Spanner 能够明确哪些是历史数据, 并提供一致的快照。
总结
Spanner 的 TureTime API 设计非常巧妙, 保证了绝对时间一定是落在 TT.now() 返回的区间之中。基于这个保证, 使得分布在全球的 spanserver 分配的 timestamp 都是基于同一参考系, 具有可比性。进而让 Spanner 能够感知分布式系统中的事件的先后顺序, 保证了 External Consistency。
但是 TureTime API 要求对误差的测量具有非常高的要求, 如果实际误差 > 预计的误差, 那么绝对时间很可能就飘到了区间之外, 后续的操作都无法保证宣称的 External Consistency。另外, Spanener 的大部分响应时间与误差的大小是正相关的。
自 Spanner 在 OSDI12 发表论文后, Spanner 一直在努力减少误差, 并提高测量误差的技术[3], 但是并没有透露更多细节。
参考
[1] Linearizability: acorrectness condition for concurrent objects(ACM TOPLAS 1990)
[2] Spanner: Google’s Globally-Distributed Database (OSDI12)
[3] Spanner: Becoming a SQL System (SIGMOD17)
[4] Weak Isolation in Relational Databases, http://www.evanjones.ca/db-isolation-semantics.html
[5] Marzullo‘s algorithm, https://en.wikipedia.org/wiki/Marzullo%27s_algorithm
作者介绍
赵百忠,腾讯云数据库工程师,从事于高可用云数据库服务的构建和管控平台开发,关注 RDS, NoSql, NewSql 等技术发展。
推荐阅读
- 并发之痛 Thread,Goroutine,Actor
- 有关并行化——你知道的可能是错的
本文作者赵百忠,转载请注明出处,技术原创及架构实践文章,欢迎通过公众号菜单「联系我们」进行投稿。
高可用架构
改变互联网的构建方式

以上是关于分布式系统中的时间和顺序——关于Spanner中的Linearizability的主要内容,如果未能解决你的问题,请参考以下文章