框架-SPI四种模式+通用设备驱动实现
Posted lizhuming
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了框架-SPI四种模式+通用设备驱动实现相关的知识,希望对你有一定的参考价值。
前言
- SPI 介绍为搜集百度资料+个人理解
- 其余为原创(有误请指正)
- 集四种模式于一身
笔录草稿
SPI介绍
-
SPI 协议简介
- SPI 协议是由摩托罗拉公司提出的通讯协议(Serial Peripheral Interface),即串行外围设备接口,是一种高速全双工的通信总线。
- 是一个环形总线结构
- 由 ss(cs)、sck、sdi、sdo 构成
- 其时序主要是在 sck 的控制下,两个双向移位寄存器进行数据交换。
-
物理线说明
- SS
- 从设备选择信号线,常称为片选信号线,也称为NSS、CS。
- 用于选择从机。
- SCK (Serial Clock)
- 时钟信号线
- 用于通讯数据同步。
- MOSI (Master Output, Slave Input)
- 主设备输出/从设备输入引脚。
- 主机发出,从机接收。
- MISO (Master Input,,Slave Output)
- 主设备输入/从设备输出引脚。
- 从机发出,主机接收。
- SS
-
SPI 四种模式
- 请移步到下面章节学习
-
SPI的协议层
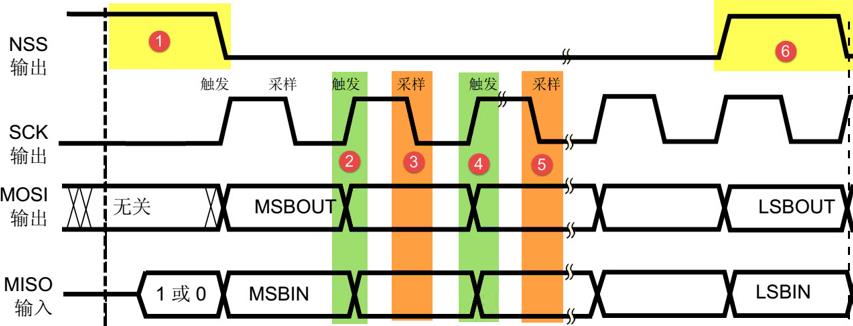
- SPI协议定义了通讯的起始和停止信号、数据有效性、时钟同步等环节。
- 基本通讯过程
- 图解
- 标号1:NSS信号线由高变低,是SPI通讯的起始信号。
- 标号6:NSS信号由低变高,是SPI通讯的停止信号。
-
简单时序图
-
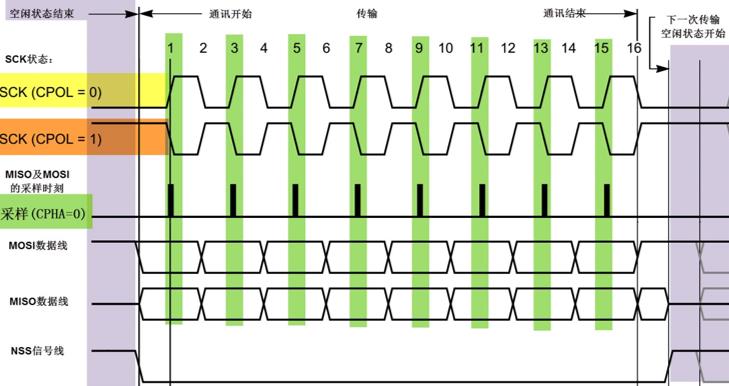
模式时序图
SPI四种模式 **
- 四种模式由 CPOL 和 CPHA 组合区分
- CPOL
- 时钟极性
- 是指SPI通讯设备处于空闲状态时,SCK信号线的电平信号
- 为 0 时
- SCK 空闲状态为 低电平
- 为 1 时
- SCK 空闲状态为 高电平
- CPHA
- 时钟相位
- 是指数据的采样的时刻
- 为 0 时
- MOSI或MISO数据线上的信号将会在SCK时钟线的“奇数边沿”被采样。(即是第一个边沿)
- 这种模式适合那种从设备一旦被片选后就输出数据到MISO线上。
- 为 1 时
- 数据线在SCK的“偶数边沿”采样。(即是第二个边沿)
- 这种模式适合那种从设备被片选后还需要一个时钟才能 输出数据到MISO线上。
- 四种模式(CPOL, CPHA)
- 模式 0:(0, 0)
- SCK空闲为 低电平,数据在SCK的 上升沿 被采样
- 模式 1:(0, 1)
- SCK空闲为 低电平,数据在SCK的 下降沿 被采样
- 模式 2:(1, 0)
- SCK空闲为 高电平,数据在SCK的 下降沿 被采样
- 模式 3:(1, 1)
- SCK空闲为 高电平,数据在SCK的 上升沿 被采样
- 模式 0:(0, 0)
SPI 驱动框架 **
框架
- 实现方法参考 I2C设备驱动拆解
- 自己先在写出四种模式的读写时序,便会发现以下规律
- 读写的逻辑差不多都一样,只是 SCK 信号线出现的位置及高低电平会因不同模式而不同。(这里我就不分别写出4种模式的单独实现了,直接上规律表,然后实现统一的源码)
| R/W | CPOL | CPHA | 位置1-SCK | 位置2-SCK | 位置3-SCK | 位置4-SCK |
|---|---|---|---|---|---|---|
| R | 0 | 0 | X | 0 | 1 | 0 |
| R | 0 | 1 | X | 1 | 0 | 0 |
| R | 1 | 0 | X | 1 | 0 | 1 |
| R | 1 | 1 | X | 0 | 1 | 1 |
| - | - | - | - | - | - | - |
| W | 0 | 0 | X | 0 | 1 | 0 |
| W | 0 | 1 | 0 | 1 | 0 | X |
| W | 1 | 0 | X | 1 | 0 | 1 |
| W | 1 | 1 | 1 | 0 | 1 | X |
由上规律得出 支持四种模式的 SPI 读写源码
- SPI 写函数
/**
* @brief SPI 写函数
* @param
* @retval
* @author lzm
*/
void spiWriteOneByte(eSPI_ID id, unsigned char data)
{
unsigned char i;
const spi_t * spi = &spiDriverElem[id];
// 位置1
if(spi->CPHA){
spiOut(spi->sckGpiox, spi->sckPin, spi->CPOL);
}
for(i=0; i<8; i++)
{
// 位置2
spiOut(spi->sckGpiox, spi->sckPin, (spi->CPOL != spi->CPHA));
if(data & 0x80){
spiMosiOutHi(spi);
}
else{
spiMosiOutLo(spi);
}
data <<= 1;
spi->delayUsFun(spi->readDelayUsCnt);
// 位置3
spiOut(spi->sckGpiox, spi->sckPin, (spi->CPOL == spi->CPHA));
}
// 位置4
if(!(spi->CPHA)){
spiOut(spi->sckGpiox, spi->sckPin, spi->CPOL);
}
}
- SPI 读函数
/**
* @brief SPI 读函数
* @param
* @retval
* @author lzm
*/
unsigned char spiReadOneByte(eSPI_ID id)
{
unsigned char i;
unsigned char ret;
const spi_t * spi = &spiDriverElem[id];
// 位置1
for(i=0; i<8; i++)
{
// 位置2
spiOut(spi->sckGpiox, spi->sckPin, (spi->CPOL != spi->CPHA));
ret <<= 1;
if(spiMisoIn(spi))
ret |= 0x01;
else
ret &= 0xfe;
spi->delayUsFun(spi->readDelayUsCnt);
// 位置3
spiOut(spi->sckGpiox, spi->sckPin, (spi->CPOL == spi->CPHA));
}
// 位置4
spiOut(spi->sckGpiox, spi->sckPin, spi->CPOL);
return ret;
}
- SPI 读写函数
/**
* @brief SPI 读写一体函数
* @param
* @retval
* @author lzm
*/
unsigned char spiRWOneByte(eSPI_ID id, unsigned char data)
{
unsigned char i;
unsigned char ret;
const spi_t * spi = &spiDriverElem[id];
// 位置1
if(spi->CPHA){
spiOut(spi->sckGpiox, spi->sckPin, spi->CPOL);
}
for(i=0; i<8; i++)
{
// 位置2
spiOut(spi->sckGpiox, spi->sckPin, (spi->CPOL != spi->CPHA));
if(data & 0x80){
spiMosiOutHi(spi);
}
else{
spiMosiOutLo(spi);
}
data <<= 1;
spi->delayUsFun(spi->readDelayUsCnt);
// 位置3
spiOut(spi->sckGpiox, spi->sckPin, (spi->CPOL == spi->CPHA));
ret <<= 1;
if(spiMisoIn(spi))
ret |= 0x01;
else
ret &= 0xfe;
spi->delayUsFun(spi->readDelayUsCnt);
}
// 位置4
if(!(spi->CPHA)){
spiOut(spi->sckGpiox, spi->sckPin, spi->CPOL);
}
}
以上是关于框架-SPI四种模式+通用设备驱动实现的主要内容,如果未能解决你的问题,请参考以下文章