ARM汇编基础下
Posted 嘻嘻兮
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ARM汇编基础下相关的知识,希望对你有一定的参考价值。
这篇博客躺在我的草稿箱里都快发霉了,续命篇,哈哈
这一篇主要就总结一下ARM汇编中一些指令相关的知识点,指令相关的东西还是挺多的,所以只能挑一些重点来记录。在上一篇中有说指令集相关的内容,这里的话主要是讨论arm指令集,也就是4字节的。
首先,先来看一下指令的一般编码格式,固定占用四字节

对于上图的符号以及参数说明如下:
opcode : 指令操作符编码
cond : 指令执行的条件编码
S : 决定指令的操作是否影响CPSR的值(是否影响标志寄存器)
Rd : 目标寄存器编码
Rn : 包含第1个操作数的寄存器编码
shifter_operand : 表示第2个操作数也可以看出来,ARM是三地址的指令语法格式,指令的基本格式如下
<opcode><cond>S <Rd>,<Rn>,<shifter_operand>这里的符号说明其实和上面差不多的,因为其指令语法格式和对应的二进制编码并不是顺序对应的
<opcode> : 指令助记符,如ADD表示算术加操作指令
<code> : 表示指令执行的条件
S : 决定指令的操作是否影响标志寄存器
<Rd> : 表示目标寄存器
<Rn> : 表示包含第一个操作数的寄存器
<shifter_operand> : 表示第2个操作数对于第二个操作数而言,通常有下面三种格式
1.立即数方式
2.寄存器方式
3.寄存器移位方式先来看立即数方式,每一个立即数由一个8位的常数循环右移得到,而循环右移多少次是由一个4位的二进制数的2倍来表示
如果立即数记作<immediate>,8位常数记作immed_8,4位的循环右移值记作rotate_imm,那么有如下公式
<immediate> = immed_8 >-> (rotate_imm * 2) //>->表示循环右移,自定义,方便一下书写而已那么也就是说如果一个立即数可以构造出上面的表达式,那么就是一个合格的立即数,否则就不是合法的,这里也体现出来ARM定长指令的弊端了,比较指令就占4字节,所以其立即数表示的范围有限。
如下就是一些合格的立即数
0xFF = 0xFF >-> (0*2)
0x104 = 0x41 >-> (0xF*2) //这里循环右移30为相当于左移2位即可
0xFF0 = 0xFF >-> (0xE*2) //相当于左移4位
如下一些操作数不是合法的
0x101,0x102,0xFF1在上面,其实对于这个常数和循环的次数如何决定是编译器做的事,我们只需明白在编写汇编代码时出现一些错误心中有数即可。
注意,在某些时候,我们会认为一些不合法的操作数但是编译通过了,这里并不是说上面的公式有误,而是有可能编译器做了指令的等价替换,简单说不适用上面的规则了,毕竟某些指令我们可以将整个第二操作数都拿来当立即数(12位),只是此时操作符编码会不一样(指令不一致)。
下面再来看寄存器的方式,这种比较好理解,在寄存器方式下,操作数即为寄存器的值
ADD r0,r1,r2 @r0 = r1 + r2再来看最后一种,寄存器移位方式,寄存器移位方式的操作数为寄存器的数值做相应的移位(或循环移位)得到,具体的移位方式有如下几种
ASR : 算术右移
LSL : 逻辑左移
LSR : 逻辑右移
ROR : 循环右移
RRX : 扩展的循环右移移位的位数可以用立即数方式或者寄存器的方式进行表示
MOV R0,R1,LSL #3 @R0 = R1 * 2^3 这里mov未使用第一操作数
ADD R0,R1,R1,LSL #3 @R0 = R1 + R1 * 2^3
SUB R0,R1,R2,LSR #4 @R0 = R1 - R2 / 2^4
MOV R0,R1,ROR R2 @R0 = R1 循环右移R2位下面再来看<code>域,这里表示ARM指令的条件码域,大多数ARM指令都可以有条件的执行,也就是根据CPSR中的标志位决定是否执行该指令。当条件满足时执行该指令,条件不满足时该指令被当作一条NOP指令。从最上面的编码格式图中可以看出,其在编码格式中在最高的四位,那么也就是说可以表示16种情况

这里在ARM5之前的版本中,所有的指令都是由条件执行的,从ARMv5版本开始,引入了一些必须无条件执行的指令。
既然在指令里面就有执行的条件,那么说明在一些简单的分支判断中可以使用条件域做无分支优化
cmp R0,#1
moveq r1,#2
movne r2,#3 上面三条指令的意思表示比较R0寄存器的值是否为1,为1则R1寄存器给2,否则r2寄存器给3。下面两条指令肯定会有一条指令当做NOP执行,这样子达到了一个无分支的优化,但是当分支里面的主体代码比较多时,这样子就不太划算了。
下面再来看一下寻址方式,总共有九种寻址方式
1.寄存器寻址
2.立即寻址
3.寄存器移位寻址
4.寄存器间接寻址
5.基址寻址
6.多寄存器寻址
7.堆栈寻址
8.块拷贝寻址
9.相对寻址前面的几种其实都是比较好理解的,就简单的记录一下,主要堆栈的寻址相对会复杂一些,因为有4种类型的堆栈
先来看寄存器寻址,操作数的值在寄存器中,指令执行时直接取出寄存器值操作
mov r1,r0 @ r1 = r0
add r1,r1,r0 @ r1 += r0立即寻址,操作是立即数,使用#表示前缀,十六进制值前面需要加0x
mov r0,#0xf0 @ r0 = 0xf0
add r1,r1,#5 @ r1 += 5寄存器移位寻址,这里也就是上面说的第二操作数可以使用寄存器移位来表示
mov r0,r1,LSL #1 @ r0 = r1 * 2
add r2,r0,r1, LSL #2 @ r2 = r0 + r1 * 4 这里很像数组的寻址公式,首地址+下标*步长具体移位的方式可以参考上面,还有这里需要说明一下,移位并不占指令周期,在CPU取指令之前,会先预处理这个移位操作计算出结果(硬件-移位器)
下面看寄存器间接寻址,操作数保存在寄存器指定地址的存储单元中,即寄存器为操作数的地址指针
ldr r0,[sp] @取出sp指向的四字节内容给r0再来看基址寻址,将基址寄存器的值与偏移量相加,形成操作数的有效地址,基址寻址用于访问基址附近的存储单元,常用于查表、数组操作、功能寄存器访问等
ldr r0,[sp, #4] @r0 = [sp+4]
ldr r0,[sp],#4 @r0 = [sp] , add sp,sp,#4注意一下上面两种的区别,下面那一种在执行完毕后sp会自动+4。
下面就是多寄存器寻址,一次传送多个寄存器值,允许一条指令传送 16 个寄存器的任何子集或所有寄存器。
push r0-r3 @push r0 到 r3的值
pop r1,r2,r3 @pop到 r0 - r3注意,这里的寄存器子集只能由小到大进行顺序排列,否则会编译错误。
再来看堆栈寻址,堆栈寻址使用堆栈指针SP,即R13,指向堆栈的栈顶,首先堆栈分为2种
向上生长:向高地址方向生长,称为递增堆栈
向下生长:向低地址方向生长,称为递减堆栈这里也就是说向堆栈压入数据时,这个堆栈地址是要加还是减,使用push指令是默认递减的,也就是往低地址,x86也是这种情况。
然后对于堆栈而言,还有如下两个情况区分
堆栈指针指向最后压入的有效数据项,称为满堆栈
堆栈指针指向下一个要放入的空位置,称为空堆栈这里其实简单的来说就是sp指向的数据是否是有效的,对于满堆栈,其sp指向的数据就是刚刚压入的数据,所以是有效的,而空堆栈则是先放数据然后提升堆栈,那么此时SP指向的数据肯定无效拉。默认情况下使用的是满堆栈。
所以总共的情况就共有四种了,默认使用的就是满递减堆栈。
1.满递增:堆栈地址向上增长,堆栈指针指向有效数据的最高地址。如 LDMFA,STMFA
2.空递增:堆栈地址向上增长,堆栈指针指向堆栈上的第一个空位置。如 LDMEA,STMEA
3.满递减:堆栈地址向下增长,堆栈指针指向有效数据项的最低地址。如 LDMFD,STMFD
4.空递减:堆栈地址向下增长,堆栈指针指向堆栈下的第一个空位置。如 LDMED,STMED 其实对于上面的push和pop而言,其实就是个伪指令,真实反汇编中对应的就是STMFD和LDMFD。
.text:B014139C 00 48 2D E9 STMFD SP!, R11,LR @push R11,LR
.text:B01413B0 00 88 BD E8 LDMFD SP!, R11,PC @pop R11,PC在上面的指令中,可以发现sp后面有加了一个!,这里表示回写的意思,也就是影响sp的值,如果不加!,那么数据压入栈,而SP是不会变化的。
下面一种就是块拷贝寻址,用于将一块数据从存储器的某一位置拷贝到另一位置。这种情况其实和上面那种情况很类似,也有4种情况,因为上面那种情况只是单独针对堆栈而言的,那么堆栈的话就是操作SP寄存器,而这里可以操作其他寄存器做递增增减的存放和读取数据操作。
其指令格式一般如下四种情况
STMXX - 写入数据
LDMXX - 读取数据
XX共有四种情况
DA - 地址递减在操作数据之后
IA - 地址递增在操作数据之后
DB - 地址递减在操作数据之前
IB - 地址递增在操作数据之前
;--------说明-------
D - dec 减
I - inc 加
A - after 之后
B - before 之前其实上面的意思和堆栈寻址是一样的,先表示地址是否向高地址还是低地址生长,然后判断满(之后操作)和空(之前操作)。
在IDA的反汇编中,只会显示堆栈寻址相关的指令,并不会显示上述的指令,下面我们来对应着堆栈寻址测试一下。
先看空堆栈的情况
STMIA sp!,r0 @STMEA
STMDA sp!,r0 @STMED
LDMDB sp,r0 @LDMEA
LDMIB sp,r0 @LDMED
对应的IDA反汇编代码如下
.text:AF0513A0 01 00 8D E8 STMEA SP, R0 @STMIA r0->[sp] sp->sp+4
.text:AF0513A4 01 00 0D E8 STMED SP, R0 @STMDA r0->[sp] sp->sp-4
.text:AF0513A8 01 00 1D E9 LDMEA SP, R0 @LDMDB sp->sp-4 r0->[sp]
.text:AF0513AC 01 00 9D E9 LDMED SP, R0 @LDMIB sp->sp+4 r0->[sp]再来看满堆栈的情况
STMIB sp,r0 @STMFA
STMDB sp,r0 @STMFD
LDMDA sp!,r0 @LDMFA
LDMIA sp!,r0 @LDMFD
对应的IDA反汇编代码如下
.text:B3D323A0 01 00 8D E9 STMFA SP, R0 @STMIB sp->sp+4 r0->[sp]
.text:B3D323A4 01 00 0D E9 STMFD SP, R0 @STMDB sp->sp-4 r0->[sp]
.text:B3D323A8 01 00 1D E8 LDMFA SP, R0 @LDMDA [sp]->r0 sp->sp-4
.text:B3D323AC 01 00 9D E8 LDMFD SP, R0 @LDMIA [sp]->r0 sp->sp+4上面使用SP寄存器来作为目标操作数只是为了方便理解和好测试,这里可以将SP寄存器换成其他任意寄存器,只是注意该寄存器里面存着的应该是一个有效的地址。
还有对于上面的操作而言,取数据其表达的地址增减是取反的,比如看最后一个指令LDMFD,这里很明显看指令意思D是递减的原因,因为这里D是针对存数据而言的,所以取数据的时候需要加(取反),而在存数据的时候直接按照指令字面意思理解即可。
再来看最后一种情况,相对寻址,相对寻址是基址寻址的一种变通,由程序计数器 PC 提供基准地址,指令中的地址码字段作为偏移量,两者相加后得到有效地址。
B LABLE1 @跳转到 LABLE1 标号处
mov r0,#0
mov r1,#1
mov r2,#2
mov r3,#3
LABLE1:观察其IDA中的反汇编代码
.text:000003A0 03 00 00 EA B LABLE1 @注意这里机器码中是 3
.text:000003A4 ; ---------------------------------------------------------------------------
.text:000003A4 00 00 A0 E3 MOV R0, #0
.text:000003A8 01 10 A0 E3 MOV R1, #1
.text:000003AC 02 20 A0 E3 MOV R2, #2
.text:000003B0 03 30 A0 E3 MOV R3, #3
.text:000003B4
.text:000003B4 LABLE1注意上面的跳转偏移值不是跳过多少字节,而是跳过多少条指令,因为PC指向的是下下条指令,也就是3A8的位置(包括该条),那么三条指令过后就是LABLE标签了。那么如果中间一条指令都没有的话,其值应该就是-1,因为PC指向下下条,此时还需回退一条指令才正确。
下面再来讲一下跳转指令,因为该类指令会比较常见,而且有些指令还比较细节,主要就以下四种
1. B <label> - 跳转
2. BL <label> - 带链接的跳转
3. BX Rm - 跳转并交换
4. BLX <label>/Rm - 带链接和交换首先,先来看B指令,也就是跳转指令,这个指令在上面已经有用过了,下面我们使用该指令来实现一个分支的功能,注意该指令同样适用于上面说的条件域。
TST r0,r0
BNE LABEL_ELSE @ r0不为零的时跳转
mov r1,1
B LABEL_EN
LABEL_ELSE:
mov r1,2
LABEL_EN:下面再来看BL指令,该指令是带链接的跳转,什么是链接?在上一篇博客中有提到过链接寄存器(LR),该寄存器保存着返回地址。那么说明该指令应该是和函数调用相关的,首先,我们先来试一下直接使用B指令来实现函数的调用
.type Add,%function
.code 32
Add:
add r0,r0,r1
mov pc,lr @这里返回
.type main,%function
.code 32 @ @main
main:
push r11, lr
mov r0,#1
mov r1,#2
mov lr,pc @pc指向下下条指令,正好是LABEL_RET的返回地址处
B Add
LABEL_RET:
pop r11, pc可以看到,使用B指令来实现函数的调用,在调用之前,我们必须自己先给LR寄存器赋值,那么如果我们使用BL指令,其实编译器就会帮我们给LR赋值,仅此而已
@mov lr,pc 该行代码注释掉即可
BL Add
LABEL_RET:OK,下面来看一个问题,假如我们调用的这个函数是Thumb指令集会这么办,比如我们需要调用一个C库函数,而这个C库函数是Thumb指令集的,那么程序会执行错误,我们可以将Add函数修改为thumb指令集然后尝试调用
.type Add,%function
.code 16 @16表示 thumb指令集
Add:
add r0,r0,r1
mov pc,lr @这里返回其实运行的时候并不会出现什么问题,因为这里编译器帮我们换成了BLX指令。但是在上一篇说过,标志寄存器中的T位用于表示CPU的工作状态,而从ARM指令集的代码跳转到Thumb指令集的代码其T位并不会变化(BLX会变化所以上面不会有问题)。
对于此,所以我们可以想到一种花指令的办法来干扰IDA的反汇编引擎,那就是在ARM的汇编代码中加入Thumb指令,那么自然其反汇编引擎会错误判断。
B LABEL @下面的.code 16就是花指令,对抗反汇编引擎
.code 16
mov r0,r1
LABEL:说明IDA的反汇编引擎不够强大(因为它认为其代码地址必然在模4的地址上),也可能是我的IDA版本较低,其实我们可以使用ndk自带的反汇编引擎,它的反汇编引擎会解析正确
arm-linux-androideabi-objdump -D Hello > 1.txt
然后在 1.txt 中搜索 <main>
所以,下面就可以来说说BX指令了,该指令后面只能跟一个寄存器的值,也就是不能跟标号。使用这条指令最主要的原因是可以带状态的切换,也就是说可以从ARM指令集切换到Thumb指令集。
那么如何判断切换呢?因为thumb或者arm都是2字节或者4字节,所以其代码的地址都是%2对齐的,最低位一直都是0,所以可以用最低位来当做T位状态的标志。如果地址值是1,那么跳转过去T位会切换为1,执行thumb指令(必须使用BX)。
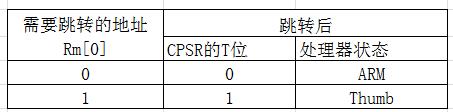
如上图所示,Rm[0]就是表示该地址的最低位。还有需要注意的是Bx指令并不会自动给LR赋值
.type Add,%function
.code 16
Add:
add r0,r0,r1
bx lr @注意这里必须使用bx来返回,因为使用mov pc的返回方式不会切换T位,这里需要回到ARM指令集
.type main,%function
.code 32 @ @main
main:
push r11, lr
mov r0,#1
mov r1,#2
sub r2,pc,#24 @pc指向下下条,也就是lr赋值的指令,中间共7条,因为Add函数的每条指令占2字节,所以总共 5*4 + 2*2 = 24
add r2,r2,1 @最低位置1,表示跳转后的代码是Thumb指令集
mov lr,pc
Bx r2使用上面的程序就可以发现其T位会自动切换了,需要注意的是在Add函数中的返回,也必须使用bx来返回,因为此时你需要从Thumb指令集回到ARM指令集。
使用完Bx之后,你应该能发现Bx这个指令最难使用的地方了吧,那就是需要自己计算其函数的地址,还有就是LR的赋值。
所以就可以讲最后一条指令了,那就是BXL,这条指令它会帮我们保存LR的值
@mov lr,pc
Blx r2该指令还是会根据其地址的最低位来判断是否需要切换T位,那么计算其函数地址如何解决,对于BLX指令,其后面除了跟一个r2寄存器,还可以跟一个标号
mov r0,#1
mov r1,#2
Blx Add那么他是如何判断的呢?其实他根本没有判断,只要是后面跟着标号,其T位必定会取反操作,所以此时对于标号情况,如果跳转是同指令集的情况,那么就不能使用blx了。
OK,上面讲完了四条跳转的指令,不过对于上面的有个问题其实还是没有本质解决,那就是当调用一个未知其指令集的库函数时,该如何解决呢?
一般来说库有其导入表,如果是Thumb指令集,那么操作系统在填写其调用地址的时候会将该函数地址进行加一,这样子就和API的调用者就无关了。下面来模拟一下
//Add 函数
.text:0000039C Add ; CODE XREF: j_Add+8↓j
.text:0000039C ; DATA XREF: j_Add+4↓o ...
.text:0000039C ADD R0, R1
.text:0000039E BX LR
//main函数
.text:000003A0 main ; DATA XREF: .text:00000358↑o
.text:000003A0 ; .got:main_ptr↓o
.text:000003A0 STMFD SP!, R11,LR
.text:000003A4 MOV R0, #1
.text:000003A8 MOV R1, #2
.text:000003AC MOV LR, PC
.text:000003B0 B j_Add @调用者只需调用j_Add即可,无需关心指令集
.text:000003B4
.text:000003B4 LABEL_RET
.text:000003B4 LDMFD SP!, R11,PC
//这里也就是模拟操作系统干的活
.text:000003B8 j_Add ; CODE XREF: main+10↑j
.text:000003B8 LDR R12, =(Add+1 - 0x3C4) @这里对Add做+1操作,因为是Thumb指令集
.text:000003BC ADD R12, PC, R12 ; Add
.text:000003C0 BX R12
.text:000003C0 ; End of function j_Add
.text:000003C0
.text:000003C0 ; ---------------------------------------------------------------------------
.text:000003C4 off_3C4 DCD Add+1 - 0x3C4 ; DATA XREF: j_Add↑r注意如果直接使用LDR指令赋值给PC,那么此时PC也会根据其最低位来切换T位。
下面再来调用一个puts函数,验证其调用的方式
Bl puts(plt) @plt表示不知道函数地址,从导入表调用 -- 这里不加 plt 也可以观察IDA中的反汇编代码
.text:000003EC BL puts @这里是我们的代码,BL不会切换状态,无需关心
.plt:00000340 puts ; CODE XREF: main+14↓p
.plt:00000340 ADR R12, 0x348
.plt:00000344 ADD R12, R12, #0x1000
.plt:00000348 LDR PC, [R12,#(puts_ptr - 0x1348)]! ; __imp_puts
.got:00001FFC puts_ptr DCD __imp_puts ; DATA XREF: puts+8↑r可以看出来,在地址348的位置,就是读取puts_ptr,并进行运算(计算函数地址),而puts_ptr其指向的内容则由操作系统来填写,可能填写puts+0或者puts+1。说明调用任何库或者API都是使用中转的方式来调用,这样子软件就可以在各种环境中跑了,无需关心库是什么指令集。
跳转指令差不多就总结这些了,对于剩余的指令如何使用,具体可以参考文档,ARM官方有提供指令速查卡,还是中文的,很方便查询指令的使用,点击下面的链接地址下载即可(官方链接)。
以上是关于ARM汇编基础下的主要内容,如果未能解决你的问题,请参考以下文章