RT-Thread 添加 DS18B20 详解
Posted raowz
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了RT-Thread 添加 DS18B20 详解相关的知识,希望对你有一定的参考价值。
闲来无事,板子上有一个DS18B20的传感器,所以就在RT-Thread系统上小试一下。。。
1.新建工程,这次改使用bsp,操作图(1)
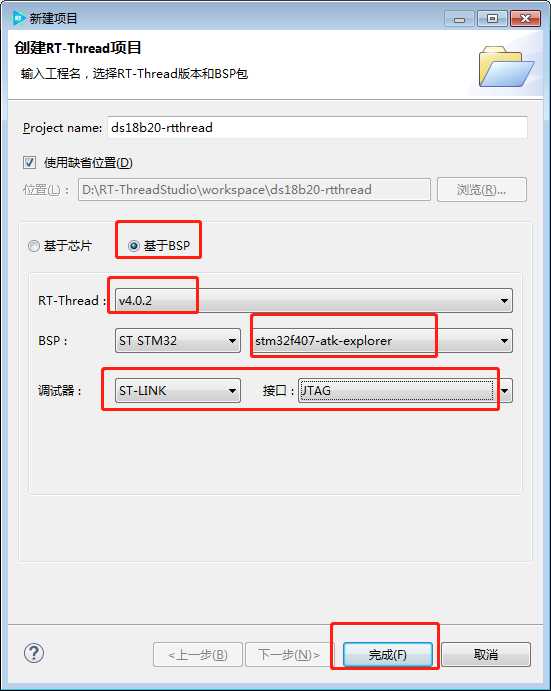
图 (1)
2.打开RT-Thread Settings,如图(2)添加ds18b20的软件包
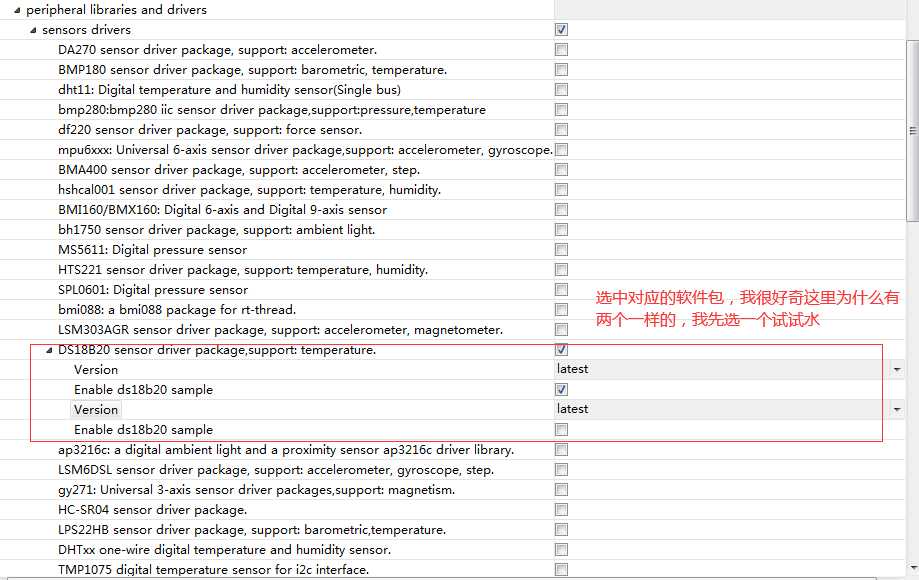
图(2)
3.可以先编译一下,会出如图(3)的错误信息
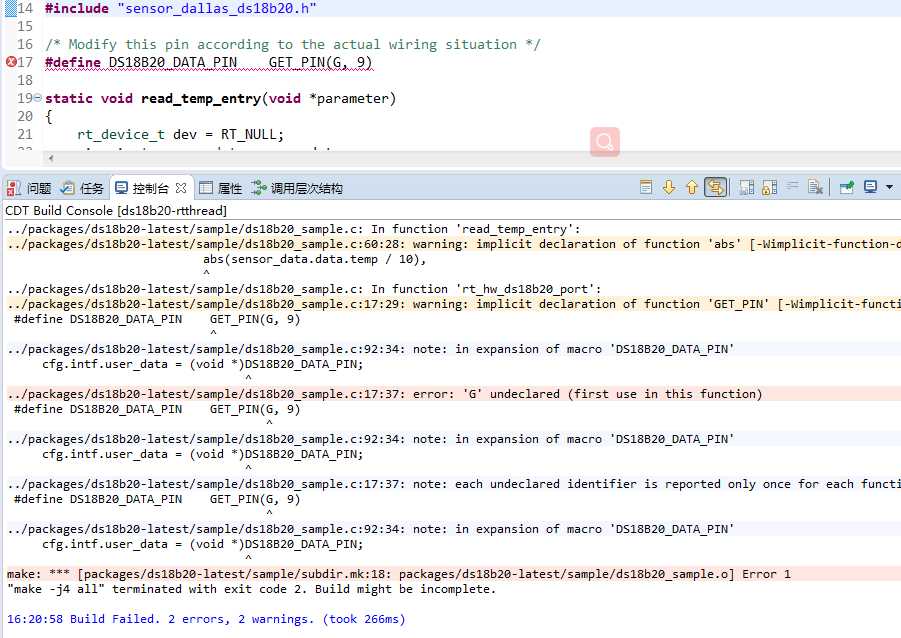
图(3)
出错很正常,不慌,先看看啥问题,根据错误提示和位置,应该是找不到GET_PIN这个宏引发的问题,在该文件头部加上该宏所在的头文件drv_gpio.h即可。
这下就编译通过了,如图(4)。
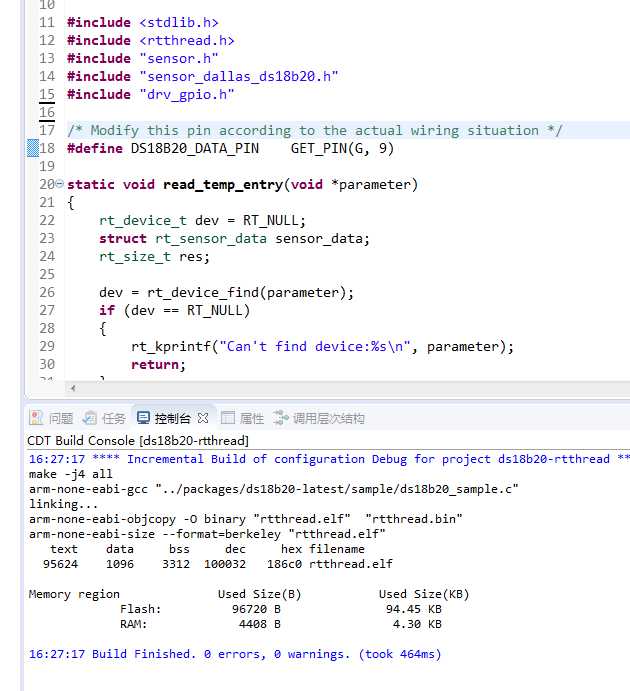
图(4)
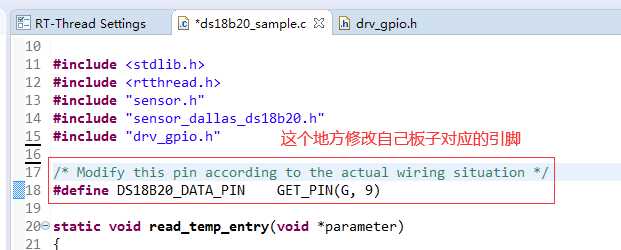
4.接下来就是根据自己的板子来修改代码。查看原理图,找到ds18b20连接到mcu的那个gpio口
我的板子接的是PG9,所以不用修改
5.下面就可以直接下载到板子运行了,如图(5)
经过上面的步骤,我们已经可以完成rtthread针对ds18b20的使用了,结果已经达到了,如果只需要结果的到此为止。
下面是看源码,rtthread是如何对ds18b20进行操作的。
懒得自己写例程了,直接看rtthread软件包中写好的sample,也就是ds18b20_sample.c
- (一) 首先,看 ds18b20_sample.c,rt_hw_ds18b20_port是针对ds18b20进行初始化,包括结构体填充和注册到rtthread系统中,标红字体需细看
1 static int rt_hw_ds18b20_port(void) 2 { 3 struct rt_sensor_config cfg; 4 /*user_data存放的是引脚信息,后面会用*/ 5 cfg.intf.user_data = (void *)DS18B20_DATA_PIN; //我们修改自己板子上引脚的宏 6 rt_hw_ds18b20_init("ds18b20", &cfg); 7 8 return RT_EOK; 9 } 10 /*该函数启动时自动执行*/ 11 INIT_COMPONENT_EXPORT(rt_hw_ds18b20_port);
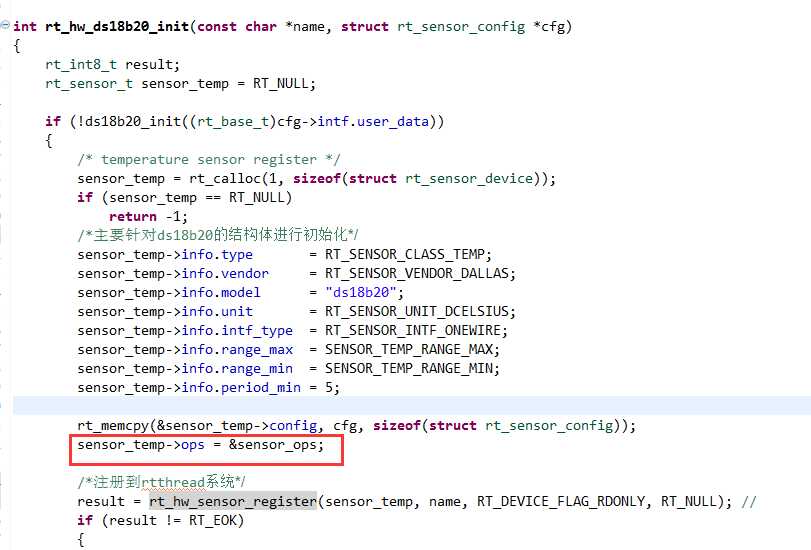
1 int rt_hw_ds18b20_init(const char *name, struct rt_sensor_config *cfg) 2 { 3 rt_int8_t result; 4 rt_sensor_t sensor_temp = RT_NULL; 5 6 if (!ds18b20_init((rt_base_t)cfg->intf.user_data)) 7 { 8 /* temperature sensor register */ 9 sensor_temp = rt_calloc(1, sizeof(struct rt_sensor_device)); 10 if (sensor_temp == RT_NULL) 11 return -1; 12 /*主要针对ds18b20的结构体进行初始化*/ 13 sensor_temp->info.type = RT_SENSOR_CLASS_TEMP; 14 sensor_temp->info.vendor = RT_SENSOR_VENDOR_DALLAS; 15 sensor_temp->info.model = "ds18b20"; 16 sensor_temp->info.unit = RT_SENSOR_UNIT_DCELSIUS; 17 sensor_temp->info.intf_type = RT_SENSOR_INTF_ONEWIRE; 18 sensor_temp->info.range_max = SENSOR_TEMP_RANGE_MAX; 19 sensor_temp->info.range_min = SENSOR_TEMP_RANGE_MIN; 20 sensor_temp->info.period_min = 5; 21 22 rt_memcpy(&sensor_temp->config, cfg, sizeof(struct rt_sensor_config)); 23 sensor_temp->ops = &sensor_ops; 24 25 /*注册到rtthread系统*/ 26 result = rt_hw_sensor_register(sensor_temp, name, RT_DEVICE_FLAG_RDONLY, RT_NULL); 27 if (result != RT_EOK) 28 { 29 LOG_E("device register err code: %d", result); 30 goto __exit; 31 } 32 33 } 34 return RT_EOK; 35 36 __exit: 37 if (sensor_temp) 38 rt_free(sensor_temp); 39 return -RT_ERROR; 40 }
1 /* 2 * sensor register 3 */ 4 int rt_hw_sensor_register(rt_sensor_t sensor, 5 const char *name, 6 rt_uint32_t flag, 7 void *data) 8 { 9 rt_int8_t result; 10 rt_device_t device; 11 RT_ASSERT(sensor != RT_NULL); 12 13 char *sensor_name = RT_NULL, *device_name = RT_NULL; 14 15 /* Add a type name for the sensor device */ 16 sensor_name = sensor_name_str[sensor->info.type]; 17 device_name = (char *)rt_calloc(1, rt_strlen(sensor_name) + 1 + rt_strlen(name)); 18 if (device_name == RT_NULL) 19 { 20 LOG_E("device_name calloc failed!"); 21 return -RT_ERROR; 22 } 23 24 rt_memcpy(device_name, sensor_name, rt_strlen(sensor_name) + 1); 25 strcat(device_name, name); 26 27 if (sensor->module != RT_NULL && sensor->module->lock == RT_NULL) 28 { 29 /* Create a mutex lock for the module */ 30 sensor->module->lock = rt_mutex_create(name, RT_IPC_FLAG_FIFO); 31 if (sensor->module->lock == RT_NULL) 32 { 33 rt_free(device_name); 34 return -RT_ERROR; 35 } 36 } 37 38 device = &sensor->parent; 39 40 #ifdef RT_USING_DEVICE_OPS 41 device->ops = &rt_sensor_ops; 42 #else 43 device->init = RT_NULL; 44 device->open = rt_sensor_open; 45 device->close = rt_sensor_close; 46 device->read = rt_sensor_read; 47 device->write = RT_NULL; 48 device->control = rt_sensor_control; 49 #endif 50 device->type = RT_Device_Class_Sensor; 51 device->rx_indicate = RT_NULL; 52 device->tx_complete = RT_NULL; 53 device->user_data = data; 54 55 result = rt_device_register(device, device_name, flag | RT_DEVICE_FLAG_STANDALONE); 56 if (result != RT_EOK) 57 { 58 rt_free(device_name); 59 LOG_E("rt_sensor register err code: %d", result); 60 return result; 61 } 62 63 rt_free(device_name); 64 LOG_I("rt_sensor init success"); 65 return RT_EOK; 66 }
*************************************************以上就完成了DS18B20对rtthread系统的适配********************************************
- (二) 对ds18b20的实际使用,还是截图吧,可以在图上添解释
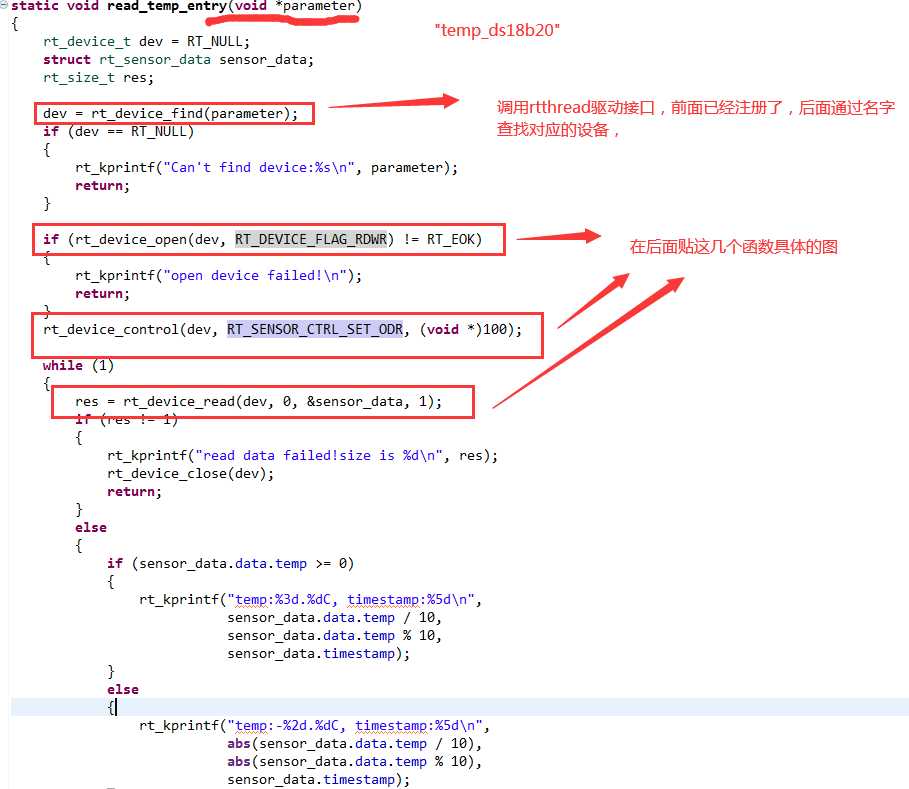
如下图是对上图函数指针操作的实际函数,在上述注册过程中赋值,也就是这里:
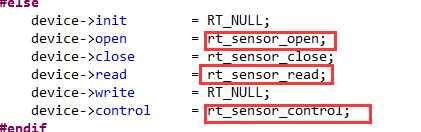
1. rt_sensor_open: 主要执行标红处
/* RT-Thread Device Interface */
根据上面的截图,传入的参数是dev也就是ds18b20,oflag = RT_DEVICE_FLAG_RDWR static rt_err_t rt_sensor_open(rt_device_t dev, rt_uint16_t oflag) { rt_sensor_t sensor = (rt_sensor_t)dev; RT_ASSERT(dev != RT_NULL); rt_err_t res = RT_EOK; if (sensor->module) { /* take the module mutex */ rt_mutex_take(sensor->module->lock, RT_WAITING_FOREVER); } if (sensor->module != RT_NULL && sensor->info.fifo_max > 0 && sensor->data_buf == RT_NULL) { /* Allocate memory for the sensor buffer */ sensor->data_buf = rt_malloc(sizeof(struct rt_sensor_data) * sensor->info.fifo_max); if (sensor->data_buf == RT_NULL) { res = -RT_ENOMEM; goto __exit; } } if (oflag & RT_DEVICE_FLAG_RDONLY && dev->flag & RT_DEVICE_FLAG_RDONLY) { if (sensor->ops->control != RT_NULL) { /* If polling mode is supported, configure it to polling mode */ sensor->ops->control(sensor, RT_SENSOR_CTRL_SET_MODE, (void *)RT_SENSOR_MODE_POLLING); } sensor->config.mode = RT_SENSOR_MODE_POLLING; } else if (oflag & RT_DEVICE_FLAG_INT_RX && dev->flag & RT_DEVICE_FLAG_INT_RX) { if (sensor->ops->control != RT_NULL) { /* If interrupt mode is supported, configure it to interrupt mode */ sensor->ops->control(sensor, RT_SENSOR_CTRL_SET_MODE, (void *)RT_SENSOR_MODE_INT); } /* Initialization sensor interrupt */ rt_sensor_irq_init(sensor); sensor->config.mode = RT_SENSOR_MODE_INT; } else if (oflag & RT_DEVICE_FLAG_FIFO_RX && dev->flag & RT_DEVICE_FLAG_FIFO_RX) { if (sensor->ops->control != RT_NULL) { /* If fifo mode is supported, configure it to fifo mode */ sensor->ops->control(sensor, RT_SENSOR_CTRL_SET_MODE, (void *)RT_SENSOR_MODE_FIFO); } /* Initialization sensor interrupt */ rt_sensor_irq_init(sensor); sensor->config.mode = RT_SENSOR_MODE_FIFO; } else { res = -RT_EINVAL; goto __exit; } /* Configure power mode to normal mode */ if (sensor->ops->control(sensor, RT_SENSOR_CTRL_SET_POWER, (void *)RT_SENSOR_POWER_NORMAL) == RT_EOK) { sensor->config.power = RT_SENSOR_POWER_NORMAL; } __exit: if (sensor->module) { /* release the module mutex */ rt_mutex_release(sensor->module->lock); } return res; }
rt_sensor_read:
static rt_size_t rt_sensor_read(rt_device_t dev, rt_off_t pos, void *buf, rt_size_t len) { rt_sensor_t sensor = (rt_sensor_t)dev; rt_size_t result = 0; RT_ASSERT(dev != RT_NULL); if (buf == NULL || len == 0) { return 0; } if (sensor->module) { rt_mutex_take(sensor->module->lock, RT_WAITING_FOREVER); } /* The buffer is not empty. Read the data in the buffer first */ if (sensor->data_len > 0) { if (len > sensor->data_len / sizeof(struct rt_sensor_data)) { len = sensor->data_len / sizeof(struct rt_sensor_data); } rt_memcpy(buf, sensor->data_buf, len * sizeof(struct rt_sensor_data)); /* Clear the buffer */ sensor->data_len = 0; result = len; } else { /* If the buffer is empty read the data */ result = sensor->ops->fetch_data(sensor, buf, len); } if (sensor->module) { rt_mutex_release(sensor->module->lock); } return result; }
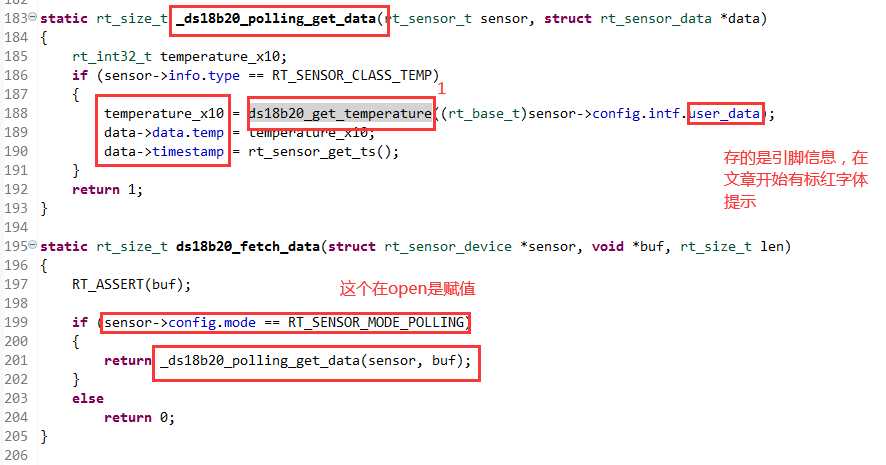
上面的fetch_data函数指针也是在注册是赋值的,可以翻上去看标红部分。也就是这里
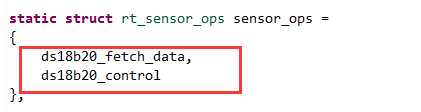
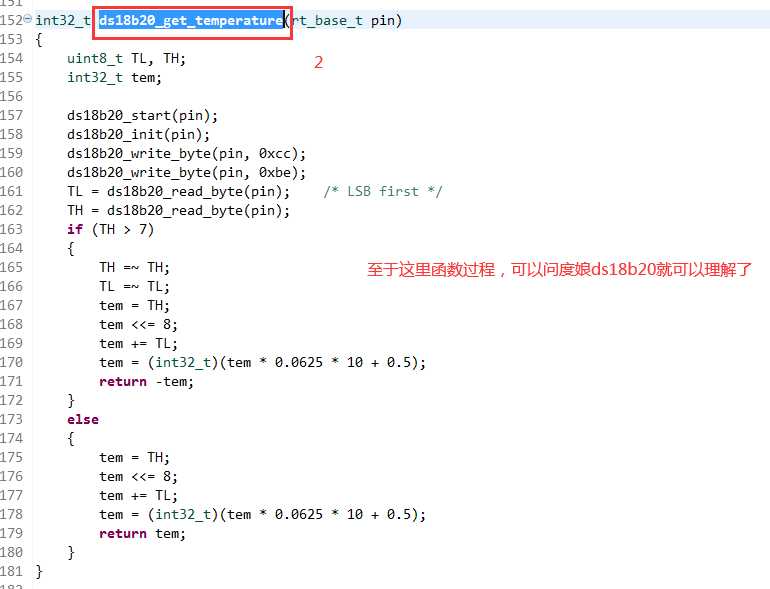
顺便把fetch_data,也就是ds18b20传输温度数据的函数贴出来
rt_sensor_control:
传过来的参数:dev是ds18b20,cmd = RT_SENSOR_CTRL_SET_ODR args = 100
static rt_err_t rt_sensor_control(rt_device_t dev, int cmd, void *args) { rt_sensor_t sensor = (rt_sensor_t)dev; rt_err_t result = RT_EOK; RT_ASSERT(dev != RT_NULL); if (sensor->module) { rt_mutex_take(sensor->module->lock, RT_WAITING_FOREVER); } switch (cmd) { case RT_SENSOR_CTRL_GET_ID: if (args) { sensor->ops->control(sensor, RT_SENSOR_CTRL_GET_ID, args); } break; case RT_SENSOR_CTRL_GET_INFO: if (args) { rt_memcpy(args, &sensor->info, sizeof(struct rt_sensor_info)); } break; case RT_SENSOR_CTRL_SET_RANGE: /* Configuration measurement range */ result = sensor->ops->control(sensor, RT_SENSOR_CTRL_SET_RANGE, args); if (result == RT_EOK) { sensor->config.range = (rt_int32_t)args; LOG_D("set range %d", sensor->config.range); } break; case RT_SENSOR_CTRL_SET_ODR: /* Configuration data output rate */ result = sensor->ops->control(sensor, RT_SENSOR_CTRL_SET_ODR, args); if (result == RT_EOK) { sensor->config.odr = (rt_uint32_t)args & 0xFFFF; LOG_D("set odr %d", sensor->config.odr); } break; case RT_SENSOR_CTRL_SET_POWER: /* Configuration sensor power mode */ result = sensor->ops->control(sensor, RT_SENSOR_CTRL_SET_POWER, args); if (result == RT_EOK) { sensor->config.power = (rt_uint32_t)args & 0xFF; LOG_D("set power mode code:", sensor->config.power); } break; case RT_SENSOR_CTRL_SELF_TEST: /* Device self-test */ result = sensor->ops->control(sensor, RT_SENSOR_CTRL_SELF_TEST, args); break; default: return -RT_ERROR; } if (sensor->module) { rt_mutex_release(sensor->module->lock); } return result; }
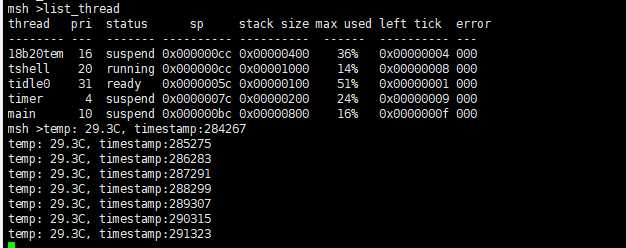
实验结果:
以上是关于RT-Thread 添加 DS18B20 详解的主要内容,如果未能解决你的问题,请参考以下文章