UNSW CV week3 Feature Representation - Shape features
Posted cheviszhang
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了UNSW CV week3 Feature Representation - Shape features相关的知识,希望对你有一定的参考价值。
总结:
Basic Shape features , shape context, HOG
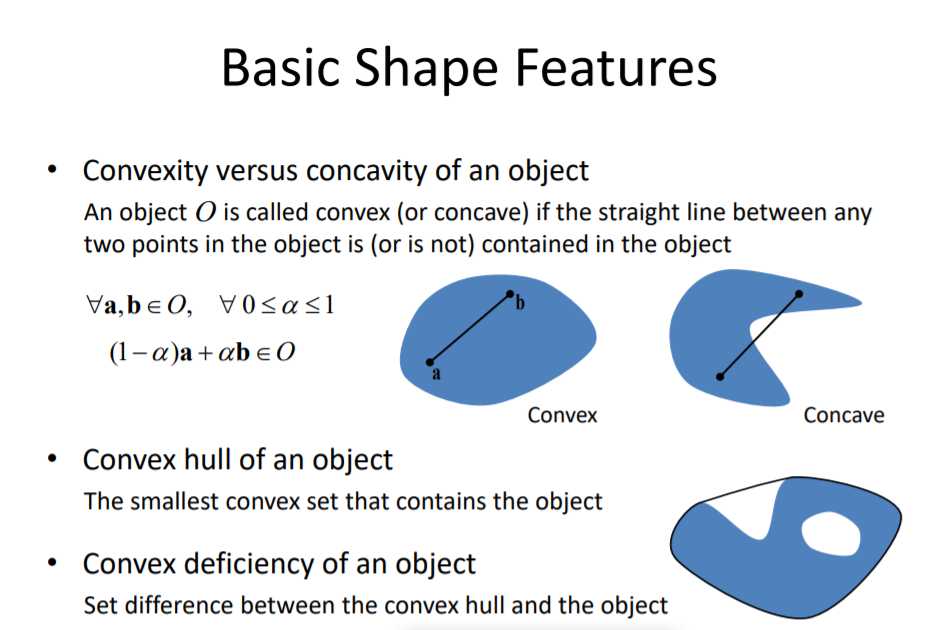
Basic Shape features:
1) diff = object的最小多凸多边形面积 - object面积, 即下图中白色区域
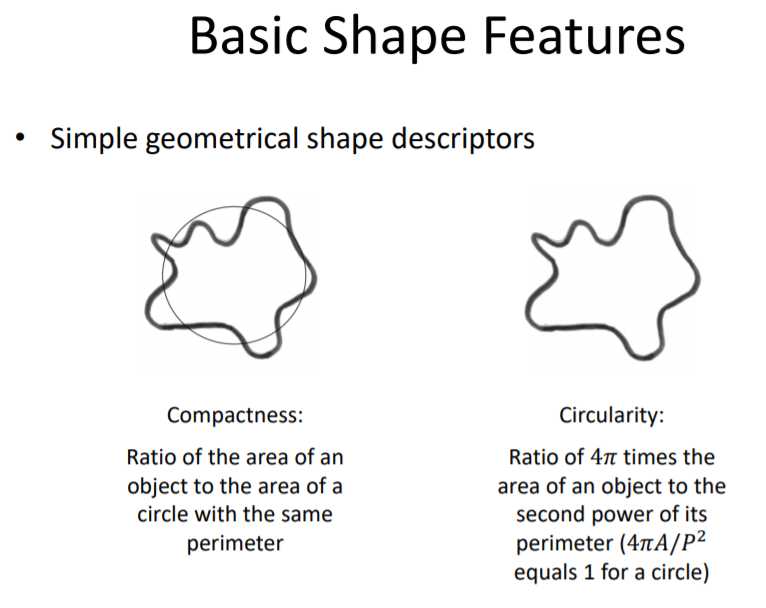
2)Compatness = object面积/ 与object同周长的圆的面积
Circularity = 4Π*object面积/ 周长的平方
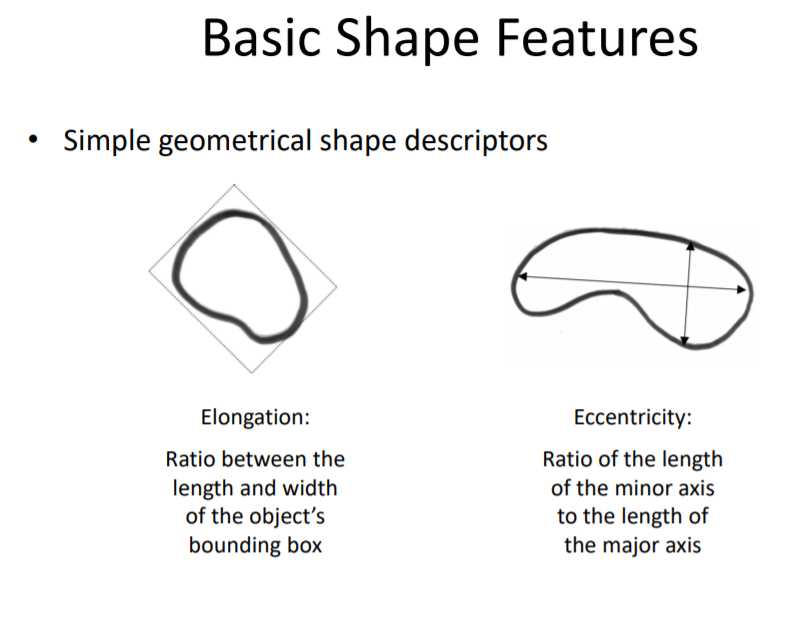
3)Elongation = lenght / width
Eccentricity = minor axis / major axis
Boundary Descriptors:
1) Chain code descriptor : 确定8个方向,用一串连续的数字来表示shape的走势,如2 1 0 7 7 0 1 1
2)Local curvature descriptor: 曲率(curvature)是图形的attribute,将图形每个点的curvature连在一起,可画出曲率图。凸点>0,凹点<0.
(1)Geometrical interpretation: K(s) = 1 / r(s) ; r(s)是该点处fit圆的半径,半径越大,曲率越小,所以取倒数
(2)Physical interpretation: 取每个点的导数 K(s) = dτ/ds
3) Radial distance descriptor: 所有边界上的点到中心点的距离之和,类似于方差(这个方法不是很清楚) 衡量 roughness
以上是关于UNSW CV week3 Feature Representation - Shape features的主要内容,如果未能解决你的问题,请参考以下文章
CV_HAAR_FEATURE_DESC_MAX和CV_HAAR_FEATURE_MAX
机器学习进阶-光流估计 1.cv2.goodFeaturesToTrack(找出光流估计所需要的角点) 2.cv2.calcOpticalFlowPyrLK(获得光流检测后的角点位置) 3.cv2.