算法学习笔记(8.1): 网络最大流算法 EK, Dinic, ISAP
Posted jeefy
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了算法学习笔记(8.1): 网络最大流算法 EK, Dinic, ISAP相关的知识,希望对你有一定的参考价值。
网络最大流
前置知识以及更多芝士参考下述链接
网络流合集链接:网络流
最大流,值得是在不超过管道(边)容量的情况下从源点到汇点最多能到达的流量
抽象一点:使 \\(\\sum_(S, v) \\in E f(S, v)\\) 最大的流函数被称为网络的最大流,此时的流量被称为网络的最大流量
有了最大流量,就可以通过奇奇怪怪的建模解决很多令人摸不着头脑的题
例如二分图:
对于一张二分图,经过建模之后我们可以这样画
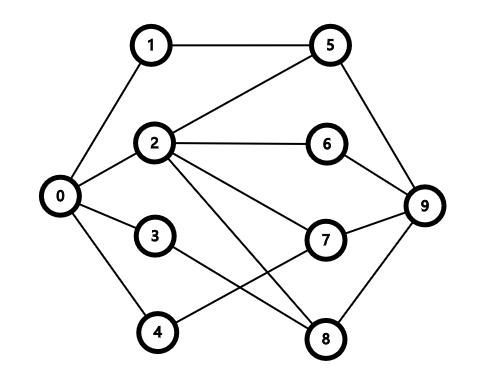
其中左部点集 \\(A = \\1, 2, 3, 4\\\\),右部点集 \\(B = \\5, 6, 7, 8\\\\), 其中源点为 \\(0\\),汇点为 \\(9\\)
建模过程:
新增一个源点 \\(S\\) 和一个汇点 \\(T\\), 从 \\(S\\) 到每一个左部点连有向边,从每一个右部点到 \\(T\\) 连有向边,把原二分图的每条边看作从左部点到右部点的有向边,形成了一张 \\(n + 2\\) 个点 \\(n + m\\) 条边的网络。其中每一条边的容量都为 \\(1\\)。
不难发现,二分图的最大匹配数就等于网络的最大流量。求出最大流后,所有有有”流“经过的点,边就是匹配点,匹配边。
进一步的:如果要求二分图多重匹配,依据题目信息改变连接汇点和源点的边的容量即可
计算最大流的算法很多,这里主要讲解 \\(EK (Edmonds-Karp)\\) ,\\(Dinic\\) 和 \\(ISAP\\) 算法。
EK 增广路算法
这里的增广路与二分图里面的增广路有不一样了 Q^Q
增广路:若一条源点 \\(S\\) 到 \\(T\\) 的路径上各边的剩余容量都严格大于 \\(0\\),则称这条路径为增广路。显然,可以让一个流沿着增广路流过,使得网络的流量增大。
而\\(EK\\)的思路就是不断进行广度优先搜索寻找增广路,直到不存在增广路为止。
而在搜索的时候,我们只考虑图中所有 \\(f(x, y) < c(x,y)\\) 的边(或者说是有剩余容量的边)。在寻找路径的同时,还要记录其前驱结点以及路径上的最小容量\\(minf\\), 在找到一条增广路后,则网络的流量可以增加 \\(minf\\)。
但是,考虑到斜对称的性质,由于我们需要把增广路上的所有边的剩余容量 \\(e(u, v)\\) 减去\\(minf\\),所以要在对其反边容量 \\(e(v, u)\\) 加上 \\(minf\\)。
初始化的时候,如果是有向边 \\((u, v)\\),则 \\(e(u, v) = c(u, v), e(v, u) = 0\\),如果是无向边,则 \\(e(u, v) = e(v, u) = c(u, v)\\)。
?: 为什么会出现无向边,网络流不是有向图吗?
考虑双向道路
马路,既可以顺流,又可以逆着。例如:[ICPC-Beijing 2006] 狼抓兔子 - 洛谷
这道题需要用到最小割,顺便说一下,最小割 = 最大流
?: 为什么使用BFS,而不是DFS?
因为DFS可能会绕圈圈……在讲述DInic的时候我会再提及
复杂度:复杂度上界为 \\(O(nm^2)\\),然而实际上远远达不到这个上界,效率还行,可以处理 \\(10^3 \\sim 10^4\\) 规模的网络
--《算法竞赛进阶指南》
我不会证明,下面的两个算法也不会 Q^Q
这里给出一种参考代码
提交记录:记录详情
#include <iostream>
#include <cstring>
#include <algorithm>
#include <deque>
using std::deque;
const int N = 2e3 + 7, M = 5e5 + 7, INF = 0x7F7F7F7F;
int n, m, s, t;
int to[M], nex[M], wi[M] = INF;
int head[N], tot = 1;
void add(int u, int v, int w)
to[++tot] = v, nex[tot] = head[u], wi[tot] = w, head[u] = tot;
void read()
scanf("%d %d %d %d", &n, &m, &s, &t);
int u, v, w;
for (int i = 0; i < m; ++i)
scanf("%d %d %d", &u, &v, &w);
add(u, v, w);
add(v, u, 0);
#define min(x, y) ((x)<(y)?(x):(y))
#define pop() que.pop_front()
#define top() que.front()
#define push(x) que.push_back(x);
#define empty() que.empty()
static int inq[N], it = 0;
static int px[N], pe[N];
inline int bfs()
deque<int> que;
push(s); inq[s] = ++it;
int x, y;
while (!empty())
x = top(); pop();
for (int i = head[x]; i; i = nex[i])
if ((inq[(y = to[i])] ^ it) && wi[i])
px[y] = x, pe[y] = i;
if (y == t) return 1;
inq[y] = it; push(y);
return 0; // 到不到了,没有增广路了
void work(long long & res)
while (bfs())
int val = INF;
for (int x = t; x ^ s; x = px[x])
val = min(val, wi[pe[x]]);
for (int x = t; x ^ s; x = px[x])
wi[pe[x]] -= val;
// 处理反边的时候利用了成对变换的方法!
wi[pe[x] ^ 1] += val;
res += val;
int main()
read();
long long res = 0;
work(res);
printf("%lld\\n", res);
return 0;
Dinic
考虑到 \\(EK\\) 算法每一次在残量网络上只找出来的一条增广路,太慢了,所以有了更优化的东西 Dinic?歌姬吧
先引入一点点概念:
深度:在搜索树上的深度(BFS搜索时的层数)
残量网络:网络中所有节点以及剩余容量大于 \\(0\\) 的边构成的子图
分层图:依据深度分层的一段段图……或者说在残量网络上,所有满足 \\(dep[u] + 1 = dep[v]\\) 的边 \\((u, v)\\) 构成的子图。
分层图显然是一张有向无环图
Dinic 算法不断重复下述过程,直到在残量网络中,\\(S\\) 不能到达 \\(T\\)
-
利用BFS求出分层图
-
在分层图上DFS寻找增广路,在回溯的时候实时更新剩余容量。另外,每个点可以同时流出到多个结点,每个点也可以接收多个点的流。
?: 这里为什么可以使用DFS
由于我们分了层,意味着DFS只会向更深的地方搜索,而不会在同一层乱跳,甚至搜索到前面。这也是为什么EK用BFS更优秀
复杂度:一般来说,时间复杂度为 \\(O(n^2m)\\),可以说是不仅简单,而且容易实现的高翔算法之一,一般能够处理 \\(10^4 \\sim 10^5\\) 规模的网络。特别的,用此算法求二分图的最大匹配时只需要 \\(O(m\\sqrtn)\\), 实际上表现会更好。
题目不变
没有当前弧优化:提交详情
有当前弧优化:记录详情
// 重复内容已省略
int dis[N], vis[N], vt = 0;
int now[N]; // 用于当前弧优化
// return true if exists non-0 road to t
bool bfs()
memset(dis, 0, sizeof(dis)); dis[s] = 1;
deque<int> que;
que.push_back(s);
while (que.size())
int x = que.front(); que.pop_front();
now[x] = head[x]; // 更新当前弧
for (int y, i = head[x]; i; i = nex[i])
if (!dis[y = to[i]] && wi[i])
dis[y] = dis[x] + 1;
que.push_back(y);
if (y == t) return true;
return false;
#define min(x, y) ((x) < (y) ? (x) : (y))
long long dinic(int x, long long maxflow)
if (x == t) return maxflow;
long long rest = maxflow, k;
for (int y, i = now[x]; i && rest; i = nex[i])
now[x] = i; // 更新当前弧
if (dis[y = to[i]] == dis[x] + 1 && wi[i])
k = dinic(y, min(rest, wi[i]));
if (!k) dis[y] = 0;
wi[i] -= k, wi[i ^ 1] += k;
rest -= k;
return maxflow - rest;
int main()
read();
long long maxflow = 0, flow;
while (bfs())
while (flow = dinic(s, INF)) maxflow += flow;
printf("%lld\\n", maxflow);
?: 当前弧优化是个啥玩意
注意到如果我们每一次遍历后,对于当前边 \\((u, v)\\),不可能再有流量流过这条边,所以我们可以暂时的删除这条边……注意,只是暂时,每一分层的时候是需要考虑这条边的,因为这条边的剩余流量不一定为 0
ISAP
某位大佬的博客上说这是究极最大流算法之一。还有一个HLPP(最高标记预留推进),思路完全与这几个方法不同,不依赖于增广路,我会把它放在另外的文章中单独讲。
我可不会告诉你们是我不会优化,太笨了,看不懂大佬的优化这是我的:记录详情 4.77s
这是大佬的:记录详情 185ms
由于Dinic需要多次BFS……所以有些不满足的数学家决定优化常数……于是有了ISAP,只需要一次BFS的东西……
可恶,竟然没有找到不用gap优化的写法 T^T
ISAP算法从某种程度上是SAP算法和Dinic的融合
SAP算法就是所谓的EK算法……ISAP也就是Improved SAP……但是主体怎么跟DInic几乎一模一样!
算法流程如下:
-
从 \\(T\\) 开始进行BFS,直到 \\(S\\) ,标记深度,同时记录当前深度有多少个
-
利用DFS不断寻找增广路,思路与Dinic类似
-
每次回溯结束后,将所在节点深度加一(远离 \\(T\\) 一点),同时更新深度记录。如果出现了断层(有一个深度没有点了)那么结束寻找。
怎么跟Dinic一摸一样啊,关键是也可以用当前弧优化,只是我用写的是vetor存图……用不了
参考代码……
提交题目还是【模板】网络最大流 - 洛谷
!! 竟然在最优解第二页 O-O
// 写这个的时候,借鉴了写HLPP最优解的大佬写快读的方法……
template<typename T>
inline void read(T &x)
char c, f(0); x = 0;
do if ((c = getchar()) == \'-\') f = true; while (isspace(c));
do x = (x<<3) + (x<<1) + (c ^ 48), c = getchar(); while (isdigit(c));
if (f) x = -x;
template <typename T, typename ...Args> inline void read(T &t, Args&... args) read(t), read(args...);
typedef long long Data;
using namespace std;
const int N = 207, M = 5007;
struct Edge
int to;
size_t rev; // 反边的位置,用int也没问题
Data flow;
Edge(int to, size_t rev, Data f) : to(to), rev(rev), flow(f)
;
class ISAP
public:
int n, m, s, t;
vector<int> dep;
int q[N * 2], gap[N * 2];
// vector< vector<Edge> > v;
vector<Edge> v[N * 2];
ISAP(int n, int m, int s, int t) : n(n), m(m), s(s), t(t)
input();
inline void input()
// v.resize(n + 1);
for (int x, y, f, i(0); i ^ m; ++i)
read(x, y, f);
v[x].push_back(Edge(y, v[y].size(), f));
v[y].push_back(Edge(x, v[x].size() - 1, 0));
inline void init()
dep.assign(n + 1, -1);
dep[t] = 0, gap[0] = 1;
// 如果要用手写队列,要开大一点……避免玄学RE,虽然理论上N就够了
register int qt(0), qf(0);
q[qt++] = t;
int x, y;
while (qf ^ qt)
x = q[qf++];
for (auto &e : v[x])
if (dep[(y = e.to)] == -1) // if dep[y] != -1
++gap[(dep[y] = dep[x] + 1)], q[qt++] = y;
// bfs end
inline Data sap(int x, Data flow)
if (x == t) return flow;
Data rest = flow;
int y, f;
for (auto &e : v[x])
if (dep[(y = e.to)] + 1 == dep[x] && e.flow)
f = sap(y, min(e.flow, rest));
if (f)
e.flow -= f, v[e.to][e.rev].flow += f;
rest -= f;
if (!rest) return flow; // flow all used
// change dep
if (--gap[dep[x]] == 0) dep[s] = n + 1; // can not reach to t
++gap[++dep[x]]; // ++depth
return flow - rest;
inline Data calc()
Data maxflow(0);
static const Data INF(numeric_limits<Data>::max());
// dep[s]最大为n,为一条链的时候
while (dep[s] <= n)
// 如果要当前弧优化,在这里需要重置当前弧的now!
maxflow += sap(s, INF);
return maxflow;
;
int main()
int n, m, s, t;
read(n, m, s, t);
static ISAP isap(n, m, s, t);
isap.init();
printf("%lld\\n", isap.calc());
return 0;
作者有话说
一般来说,如果图非常稠密(边数远远大于点数),当前弧优化的力度就非常大了
如:Zoj3229 Shoot the Bullet|东方文花帖|【模板】有源汇上下界最大流 - 洛谷
写了当前弧优化的Dinic能轻松过……没写全TLE
虽然没写当前弧优化的ISAP能更快的过前三个点,但最后一个点过不了……QwQ
没试过写当前弧优化的ISAP
但是如果边数不多,当前弧优化可能就成了负优化了……所以需要根据题目数据合理使用
以上是关于算法学习笔记(8.1): 网络最大流算法 EK, Dinic, ISAP的主要内容,如果未能解决你的问题,请参考以下文章