用OpenMV自动识别颜色序列
Posted Dragonet-Z
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了用OpenMV自动识别颜色序列相关的知识,希望对你有一定的参考价值。
用OpenMV自动识别颜色序列
新年假期过去啦~
主控:OpenMV3 M7摄像头(STM32F765)
IDE:OPENMV官方IDE
我将Capstone期间做的代码上传到Gitee啦,后续还会陆续上传代码上去的,地址:Capstone,如果对你有帮助的话不妨点个⭐支持一下~
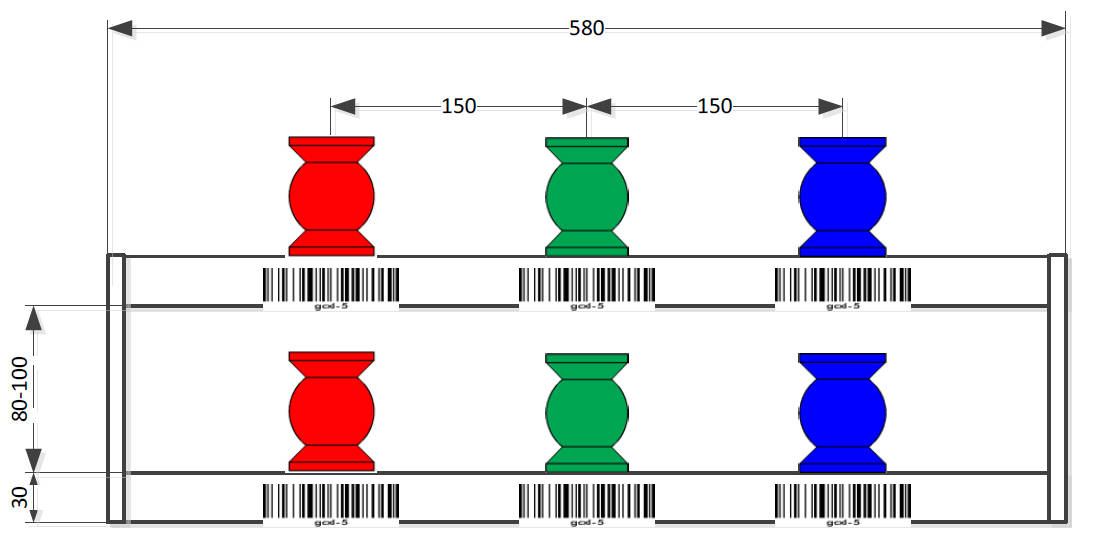
OpenMV需要识别颜色顺序的位置是第一个区域,区域中的物料摆放如下图所示
对于OpenMV识别颜色,很大一部分人都是采用了使用阈值调节,通过拍回来的照片修改阈值得到想要的区域,这种情况一般都会存在调试时间长,受光照影响大的限制。
通过分析本项目的颜色识别部分,小车到达粗加工区后开始颜色识别,识别到序列之后在开始抓取,车子在识别颜色时的位置是大致不变的,所以本文将阈值->颜色识别的流程转化为区域->颜色的识别,可以减少调试时间,但解决不了受光照影响的问题。
OpenMV使用的是LAB色域,如下图所示
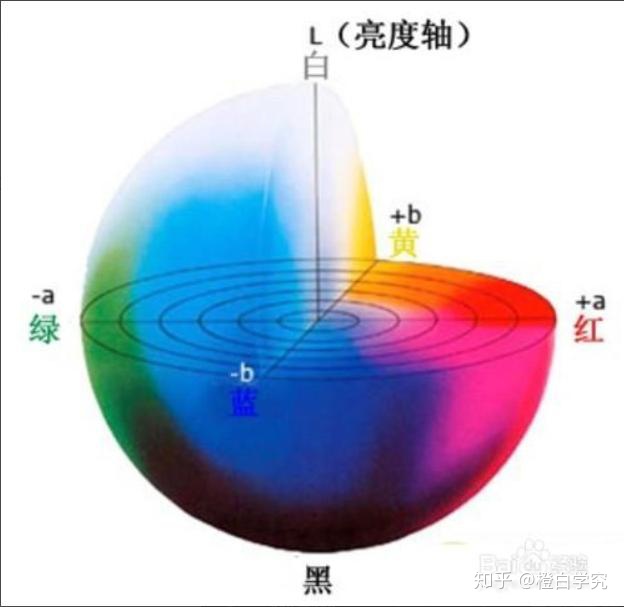
根据任务要求,物料颜色分别有红绿蓝三色,则对上图进行观察对比,可以发现红绿蓝三色均在球形的外端,有非明显的区别,比如红色的a值为正数,蓝色的b值为负数,绿色的a值为负数。因此可以根据这些特征筛选出所需颜色。
在实际运行过程中,我们将OpenMV的画面分成上下两部分,然后在每次运行到粗加工区位置时都运行一遍识别程序,避免因颜色识别不全卡在粗加工区。
在此处放出获取区域颜色的代码
function:GetColor
def GetColor(Rev_Num):
global Left_x
global Middle_x
global Right_x
global Left_y
global Middle_y
global Right_y
global LeftMean_Shang
global MiddleMean_Shang
global RightMean_Shang
global LeftMean_Xia
global MiddleMean_Xia
global RightMean_Xia
if (Rev_Num == 1):
#获取左中右三个位置的X坐标和Y坐标
Left_x = LeftROI_Shang[0] + (LeftROI_Shang[2] / 2)
Middle_x = MiddleROI_Shang[0] + (MiddleROI_Shang[2] / 2)
Right_x = RightROI_Shang[0] + (RightROI_Shang[2] / 2)
Left_y = LeftROI_Shang[1] + (LeftROI_Shang[3] / 2)
Middle_y = MiddleROI_Shang[1] + (MiddleROI_Shang[3] / 2)
Right_y = RightROI_Shang[1] + (RightROI_Shang[3] / 2)
for i in range(100):
img = sensor.snapshot()
img.draw_rectangle(LeftROI_Shang)
img.draw_rectangle(MiddleROI_Shang)
img.draw_rectangle(RightROI_Shang)
img.draw_cross(int(Left_x), int(Left_y))
img.draw_cross(int(Middle_x), int(Middle_y))
img.draw_cross(int(Right_x), int(Right_y))
Left_Stat = img.get_statistics(roi = LeftROI_Shang)
Middle_Stat = img.get_statistics(roi = MiddleROI_Shang)
Right_Stat = img.get_statistics(roi = RightROI_Shang)
#获取上层左侧ROI的LAB均值
LeftMean_Shang[0] = LeftMean_Shang[0] + (Left_Stat.l_mean() / 100)
LeftMean_Shang[1] = LeftMean_Shang[1] + (Left_Stat.a_mean() / 100)
LeftMean_Shang[2] = LeftMean_Shang[2] + (Left_Stat.b_mean() / 100)
#获取上层中间ROI的LAB均值
MiddleMean_Shang[0] = MiddleMean_Shang[0] + (Middle_Stat.l_mean() / 100)
MiddleMean_Shang[1] = MiddleMean_Shang[1] + (Middle_Stat.a_mean() / 100)
MiddleMean_Shang[2] = MiddleMean_Shang[2] + (Middle_Stat.b_mean() / 100)
#获取上层右侧ROI的LAB均值
RightMean_Shang[0] = RightMean_Shang[0] + (Right_Stat.l_mean() / 100)
RightMean_Shang[1] = RightMean_Shang[1] + (Right_Stat.a_mean() / 100)
RightMean_Shang[2] = RightMean_Shang[2] + (Right_Stat.b_mean() / 100)
elif (Rev_Num == 2):
#获取左中右三个位置的X坐标和Y坐标
Left_x = LeftROI_Xia[0] + (LeftROI_Xia[2] / 2)
Middle_x = MiddleROI_Xia[0] + (MiddleROI_Xia[2] / 2)
Right_x = RightROI_Xia[0] + (RightROI_Xia[2] / 2)
Left_y = LeftROI_Xia[1] + (LeftROI_Xia[3] / 2)
Middle_y = MiddleROI_Xia[1] + (MiddleROI_Xia[3] / 2)
Right_y = RightROI_Xia[1] + (RightROI_Xia[3] / 2)
for i in range(100):
img = sensor.snapshot()
img.draw_rectangle(LeftROI_Xia)
img.draw_rectangle(MiddleROI_Xia)
img.draw_rectangle(RightROI_Xia)
img.draw_cross(int(Left_x), int(Left_y))
img.draw_cross(int(Middle_x), int(Middle_y))
img.draw_cross(int(Right_x), int(Right_y))
Left_Stat = img.get_statistics(roi = LeftROI_Xia)
Middle_Stat = img.get_statistics(roi = MiddleROI_Xia)
Right_Stat = img.get_statistics(roi = RightROI_Xia)
#获取下层左侧ROI的LAB均值
LeftMean_Xia[0] = LeftMean_Xia[0] + (Left_Stat.l_mean() / 100)
LeftMean_Xia[1] = LeftMean_Xia[1] + (Left_Stat.a_mean() / 100)
LeftMean_Xia[2] = LeftMean_Xia[2] + (Left_Stat.b_mean() / 100)
#获取下层中间ROI的LAB均值
MiddleMean_Xia[0] = MiddleMean_Xia[0] + (Middle_Stat.l_mean() / 100)
MiddleMean_Xia[1] = MiddleMean_Xia[1] + (Middle_Stat.a_mean() / 100)
MiddleMean_Xia[2] = MiddleMean_Xia[2] + (Middle_Stat.b_mean() / 100)
#获取下层右侧ROI的LAB均值
RightMean_Xia[0] = RightMean_Xia[0] + (Right_Stat.l_mean() / 100)
RightMean_Xia[1] = RightMean_Xia[1] + (Right_Stat.a_mean() / 100)
RightMean_Xia[2] = RightMean_Xia[2] + (Right_Stat.b_mean() / 100)简单介绍一下函数,函数内容挺简单的,将画面中三个区域中的LAB阈值提出来做均分再相加,就得到了三个区域中L、A、B三个通道的颜色均值,后面再做对比就行
还有调试用的函数,这个函数是用来调试找到三个区域的
function:Get_ROI
def Get_ROI(Rev_Num):
global Left_x
global Middle_x
global Right_x
global Left_y
global Middle_y
global Right_y
if (Rev_Num == 1):
#裁剪窗口
sensor.set_windowing(ROI_Shang)
#获取左中右三个位置的X坐标和Y坐标
Left_x = LeftROI_Shang[0] + (LeftROI_Shang[2] / 2)
Middle_x = MiddleROI_Shang[0] + (MiddleROI_Shang[2] / 2)
Right_x = RightROI_Shang[0] + (RightROI_Shang[2] / 2)
Left_y = LeftROI_Shang[1] + (LeftROI_Shang[3] / 2)
Middle_y = MiddleROI_Shang[1] + (MiddleROI_Shang[3] / 2)
Right_y = RightROI_Shang[1] + (RightROI_Shang[3] / 2)
img = sensor.snapshot()
img.draw_rectangle(LeftROI_Shang)
img.draw_rectangle(MiddleROI_Shang)
img.draw_rectangle(RightROI_Shang)
img.draw_cross(int(Left_x), int(Left_y))
img.draw_cross(int(Middle_x), int(Middle_y))
img.draw_cross(int(Right_x), int(Right_y))
elif (Rev_Num == 2):
#裁剪窗口
#sensor.set_windowing(ROI_Xia)
#获取左中右三个位置的X坐标和Y坐标
Left_x = LeftROI_Xia[0] + (LeftROI_Xia[2] / 2)
Middle_x = MiddleROI_Xia[0] + (MiddleROI_Xia[2] / 2)
Right_x = RightROI_Xia[0] + (RightROI_Xia[2] / 2)
Left_y = LeftROI_Xia[1] + (LeftROI_Xia[3] / 2)
Middle_y = MiddleROI_Xia[1] + (MiddleROI_Xia[3] / 2)
Right_y = RightROI_Xia[1] + (RightROI_Xia[3] / 2)
img = sensor.snapshot()
img.draw_rectangle(LeftROI_Xia)
img.draw_rectangle(MiddleROI_Xia)
img.draw_rectangle(RightROI_Xia)
img.draw_cross(int(Left_x), int(Left_y))
img.draw_cross(int(Middle_x), int(Middle_y))
img.draw_cross(int(Right_x), int(Right_y))完整的代码发在了Gitee上
程序的运行结果如下图,可以成功的识别得到颜色的序列
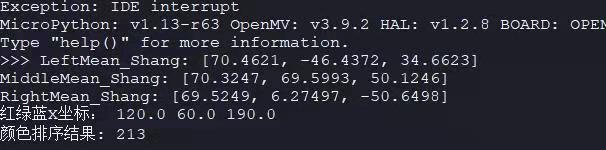
手上没有openmv,测试图就这一张
作者:Dragonet-Z
出处:https://www.cnblogs.com/dragonet-Z/p/15867520.html
版权声明:本博客所有文章除特殊声明外,均遵循BY-NC-ND许可协议,转载请注明出处!
以上是关于用OpenMV自动识别颜色序列的主要内容,如果未能解决你的问题,请参考以下文章