[源码解析] PyTorch 分布式之弹性训练---Rendezvous 引擎
Posted 罗西的思考
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了[源码解析] PyTorch 分布式之弹性训练---Rendezvous 引擎相关的知识,希望对你有一定的参考价值。
[源码解析] PyTorch 分布式之弹性训练(5)---Rendezvous 引擎
0x00 摘要
在前面的文章之中,我们已经学习了PyTorch 分布式的基本模块,介绍了官方的几个例子,我们接下来会介绍PyTorch的弹性训练,本文是第五篇,看看Rendezvous 的内部引擎,比如如何处理节点加入,节点离开,等待,心跳等等。
弹性训练系列文章如下:
[源码解析] PyTorch 分布式之弹性训练(1) --- 总体思路
[源码解析] PyTorch 分布式之弹性训练(2)---启动&单节点流程
[源码解析] PyTorch 分布式之弹性训练(3)---代理
[源码解析] PyTorch 分布式之弹性训练(4)---Rendezvous 架构和逻辑
0x01 前言
1.1 总体系统
弹性训练可以理解为在 Rendezvous 基础之上的一个运行系统。
-
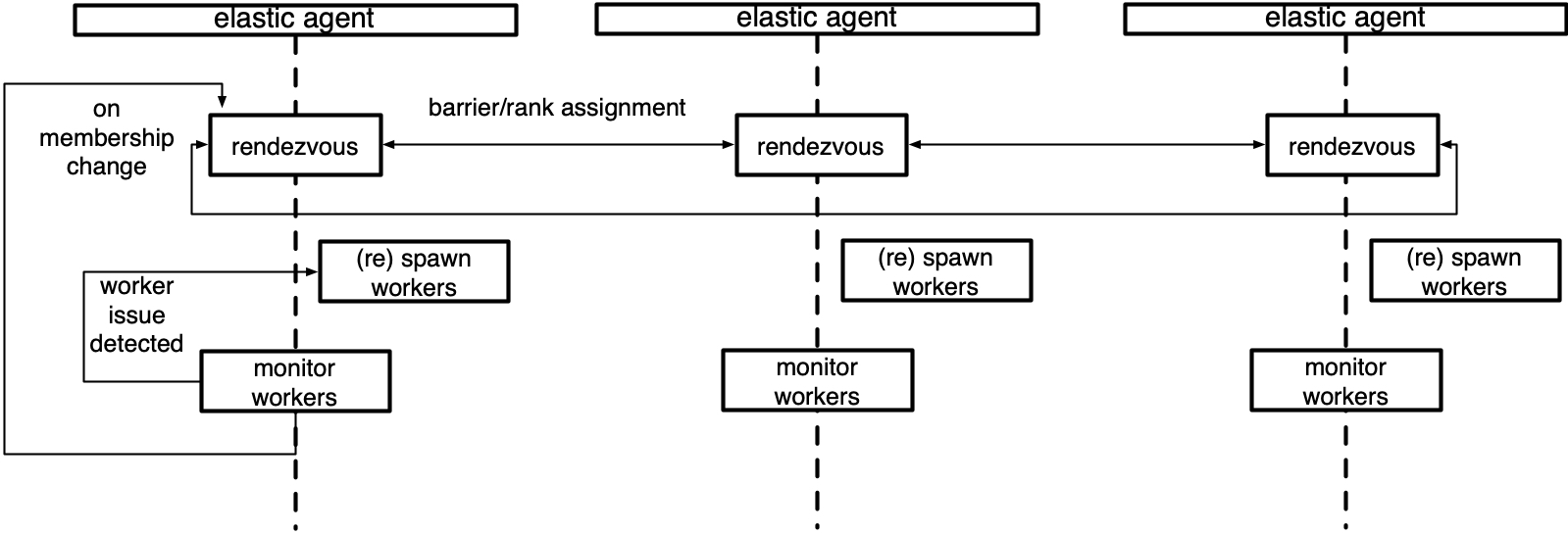
Agent 偏重具体节点上的逻辑
- Agent 负责具体业务逻辑相关操作,比如启动进程执行用户程序,监控用户程序运行情况,如果有异常就通知 Rendezvous。
- Agent 是一个 worker manager,负责启动/管理 workers 进程,组成一个 worker group,监控 workers 运行状态,捕获失效 workers,如果有故障/新加入worker,则重启 worker group。
- Agent负责维护 WORLD_SIZE 以及 RANK 信息。用户不需要再手动提供,Agent会自动处理这些。
- Agent 是具体节点上的后台进程,是独立个体。Agent自己无法实现整体上的弹性训练,所以需要一个机制来完成 worker 之间的相互发现,变更同步等等(WORLD_SIZE 和 RANK 这些信息其实也需要多个节点同步才能确定),这就是下面的 Rendezvous 概念。
-
Rendezvous 负责
集群逻辑
,保证节点之间对于""有哪些节点参与训练"达成强一致共识。
- 每一个 Agent 内部包括一个 Rendezvous handler,这些 handler 总体上构成了一个 Rendezvous 集群,从而构成了一个 Agent 集群。
- Rendezvous 完成之后,会创建一个共享键值存储(shared key-value store),这个store实现了一个
torch.distributed.StoreAPI。此存储仅由已完成Rendezvous的成员共享,它旨在让Torch Distributed Elastic在初始化作业过程之中交换控制和数据信息。 - Rendezvous 负责在每个agent之上维护当前 group 所有相关信息。每个 agent 之上有一个 rendezvous,它们会互相通信,总体维护一套信息,这些信息存储在上面提到的Store 之中。
- Rendezvous 负责集群逻辑相关,比如新加入节点,移除节点,分配rank等等。
1.2 Rendezvous
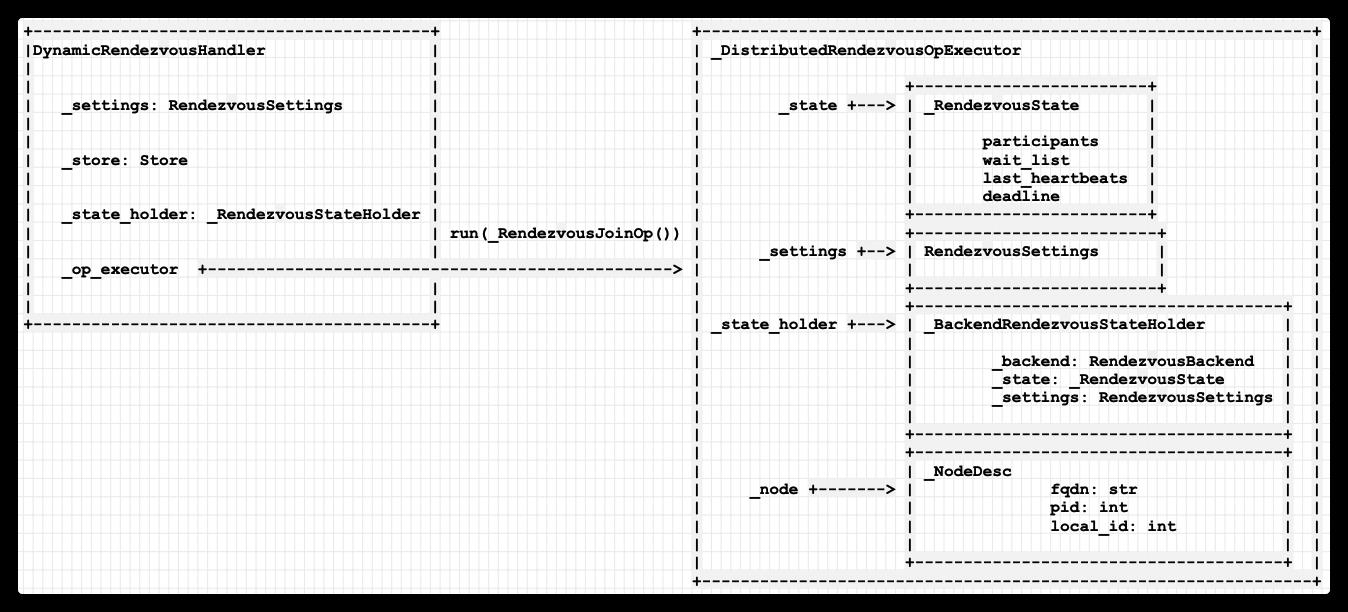
目前为止,Rendezvous 信息如下,DynamicRendezvousHandler 属于动态逻辑,其中,_RendezvousStateHolder 是状态等元信息存储(静态结构),大家会发现图中还有一个 _RendezvousOpExecutor 没有介绍,这就是运行时引擎,所以我们本文看看 _RendezvousOpExecutor 如何处理。
+-----------------------------+ +------------------------------------------------+
| LocalElasticAgent | | WorkerSpec |
| | | |
| +------------------------+ | | rdzv_handler = DynamicRendezvousHandler -------+
| |WorkerGroup | | | | |
| | spec +--------------> | entry = worker_fn | |
| | workers | | | | |
| | store | | | role = str \'trainer\' | |
| | group_rank | | | | |
| | group_world_size | | +------------------------------------------------+ |
| | | | |
| +------------------------+ | |
| | |
| rdzv_run_id | |
| store | +-----------------------------------------+ |
| | |DynamicRendezvousHandler | |
+-----------------------------+ | | |
| | |
| _settings: RendezvousSettings | <--+
| |
| _store: Store |
| |
| _state_holder: _RendezvousStateHolder |
| |
| _op_executor: _RendezvousOpExecutor |
| |
+-----------------------------------------+
1.3 解耦
_RendezvousOpExecutor 把功能分割解耦:
- 业务逻辑被抽象成为一系列算子,比如
_RendevzousJoinOp。 - Rendezvous 内部维护了一套由业务函数组成的状态机,比如函数 _add_to_participants 用来添加参与者。
_RendezvousOpExecutor引擎来执行各种算子,依据算子结果,得到一个 Action,再利用 Action 调用业务函数进行操作。
本文主要介绍C10d 后端对应的 Rendezvous 引擎。
0x02 引擎实现
2.1 基类
_RendezvousOpExecutor 是引擎的基类,只是定义了run这个虚函数。
class _RendezvousOpExecutor(ABC):
"""Executes rendezvous operations."""
@abstractmethod
def run(
self, state_handler: Callable[[_RendezvousContext, float], _Action], deadline: float
) -> None:
"""Executes a rendezvous operation.
An operation is run inside a state machine and is expected to transition
the rendezvous from one state to another.
Args:
state_handler:
A callable that is expected to return the next state transition
action based on the current state of the rendezvous.
deadline:
The time, in seconds, at which the operation will be considered
timed-out.
"""
这里用到了 _RendezvousContext,其作用是把 Rendezvous 的各种信息封装了起来,提供给操作引擎。这里就有了 _RendezvousState 和 RendezvousSettings 的使用。
class _RendezvousContext:
"""Holds the context of the rendezvous.
Attributes:
node:
The node descriptor associated with the current rendezvous handler
instance.
state:
The current state of the rendezvous.
settings:
The rendezvous settings.
"""
node: _NodeDesc
state: _RendezvousState
settings: RendezvousSettings
def __init__(
self, node: _NodeDesc, state: _RendezvousState, settings: RendezvousSettings
) -> None:
self.node = node
self.state = state
self.settings = settings
2.2 分布式操作引擎
_DistributedRendezvousOpExecutor 拓展了 _RendezvousOpExecutor,是 ElasticTorch 的实际执行者。类似于 Looper,负责消息分发,调用业务,状态维护。
2.2.1 定义
与其基类相比,_DistributedRendezvousOpExecutor 加入了比如节点信息,状态,配置这样的成员变量。
class _DistributedRendezvousOpExecutor(_RendezvousOpExecutor):
"""Executes rendezvous operations using a shared state.
Args:
node:
The node descriptor associated with the current rendezvous handler
instance.
state_holder:
The ``RendezvousStateHolder`` to use to sync the rendezvous state
with other nodes.
settings:
The rendezvous settings.
"""
_node: _NodeDesc
_state: _RendezvousState
_state_holder: _RendezvousStateHolder
_settings: RendezvousSettings
def __init__(
self,
node: _NodeDesc,
state_holder: _RendezvousStateHolder,
settings: RendezvousSettings,
) -> None:
self._node = node
self._state_holder = state_holder
self._settings = settings
逻辑如下:
+---------------------------------------------------------------+
| _DistributedRendezvousOpExecutor |
| |
| +------------------------+ |
| _state +---> | _RendezvousState | |
| | | |
| | participants | |
| | wait_list | |
| | last_heartbeats | |
| | deadline | |
| +------------------------+ |
| |
| +-------------------------+ |
| _settings +--> | RendezvousSettings | |
| | | |
| +-------------------------+ |
| |
| +--------------------------------------+ |
| _state_holder +---> | _BackendRendezvousStateHolder | |
| | | |
| | _backend: RendezvousBackend | |
| | _state: _RendezvousState | |
| | _settings: RendezvousSettings | |
| | | |
| +--------------------------------------+ |
| +--------------------------------------+ |
| | _NodeDesc | |
| _node +-------> | fqdn: str | |
| | pid: int | |
| | local_id: int | |
| | | |
| +--------------------------------------+ |
+---------------------------------------------------------------+
2.2.2 调用
我们举出几个例子来看看如何调用引擎,可以看到都是先设置算子,然后调用引擎的run函数。
2.2.2.1 _RendezvousKeepAliveOp
def _keep_alive(self) -> None:
self._heartbeat_lock.acquire()
op = _RendezvousKeepAliveOp() # 设置算子
deadline = self._get_deadline(self._settings.timeout.heartbeat)
self._op_executor.run(op, deadline) # 调用
2.2.2.2 _RendezvousCloseOp
def _close(self) -> None:
op = _RendezvousCloseOp() # 设置算子
deadline = self._get_deadline(self._settings.timeout.close)
self._op_executor.run(op, deadline) # 调用
2.2.2.3 _RendezvousJoinOp
def next_rendezvous(self) -> Tuple[Store, int, int]:
"""See base class."""
self._stop_heartbeats()
# Delay the execution for a small random amount of time if this is our
# first run. This will slightly skew the rendezvous attempts across the
# nodes and reduce the load on the backend.
if self._state_holder.state.round == 0:
_delay(seconds=(0, 0.3))
exit_op = _RendezvousExitOp() # 设置算子
join_op = _RendezvousJoinOp() # 设置算子
deadline = self._get_deadline(self._settings.timeout.join)
self._op_executor.run(exit_op, deadline) # 这里会进行调用
self._op_executor.run(join_op, deadline) # 调用
self._start_heartbeats()
rank, world_size = self._get_world()
store = self._get_store()
return store, rank, world_size
2.2.3 功能
_DistributedRendezvousOpExecutor 之中,run 函数实现了基础逻辑,就是依据 action 类型进行各种操作。
2.2.3.1 主体循环
run 具体代码如下:
def run(
self, state_handler: Callable[[_RendezvousContext, float], _Action], deadline: float
) -> None:
"""See base class."""
action = None
while action != _Action.FINISH: # 循环,一直到获得一个FINISH action 为止
# Reads or writes the latest rendezvous state shared by all nodes in
# the rendezvous. Note that our local changes might get overridden
# by another node if that node synced its changes before us.
# 这里很重要,在所有node之间做信息同步
has_set = self._state_holder.sync() # 因为最新状态在 rendezvous。
self._state = self._state_holder.state
ctx = _RendezvousContext(self._node, self._state, self._settings)
# Determine the next action to take based on the current state of
# the rendezvous.
action = state_handler(ctx, deadline) # 决定下一个操作,state_handler 就是算子
if action == _Action.FINISH:
continue
if action == _Action.ERROR_CLOSED:
raise RendezvousClosedError()
if action == _Action.ERROR_TIMEOUT:
raise RendezvousTimeoutError()
if action == _Action.SYNC:
# Delay the execution by one second to avoid overloading the
# backend if we are asked to poll for state changes.
_delay(seconds=1)
else:
if action == _Action.KEEP_ALIVE:
self._keep_alive()
elif action == _Action.ADD_TO_PARTICIPANTS:
self._add_to_participants()
elif action == _Action.ADD_TO_WAIT_LIST:
self._add_to_wait_list()
elif action == _Action.REMOVE_FROM_PARTICIPANTS:
self._remove_from_participants()
elif action == _Action.REMOVE_FROM_WAIT_LIST:
self._remove_from_wait_list()
elif action == _Action.MARK_RENDEZVOUS_COMPLETE:
self._mark_rendezvous_complete()
elif action == _Action.MARK_RENDEZVOUS_CLOSED:
self._mark_rendezvous_closed()
# Attempt to sync our changes back to other nodes.
self._state_holder.mark_dirty()
具体如下图。
+-----------------------------------------+ +---------------------------------------------------------------+
|DynamicRendezvousHandler | | _DistributedRendezvousOpExecutor |
| | | |
| | | +------------------------+ |
| _settings: RendezvousSettings | | _state +---> | _RendezvousState | |
| | | | | |
| | | | participants | |
| _store: Store | | | wait_list | |
| | | | last_heartbeats | |
| | | | deadline | |
| _state_holder: _RendezvousStateHolder | | +------------------------+ |
| | run(_RendezvousJoinOp()) | +-------------------------+ |
| | | _settings +--> | RendezvousSettings | |
| _op_executor +------------------------------------------------> | | | |
| | | +-------------------------+ |
| | | +--------------------------------------+ |
+-----------------------------------------+ | _state_holder +---> | _BackendRendezvousStateHolder | |
| | | |
| | _backend: RendezvousBackend | |
| | _state: _RendezvousState | |
| | _settings: RendezvousSettings | |
| | | |
| +--------------------------------------+ |
| +--------------------------------------+ |
| | _NodeDesc | |
| _node +-------> | fqdn: str | |
| | pid: int | |
| | local_id: int | |
| | | |
| +--------------------------------------+ |
+---------------------------------------------------------------+
手机如下:
2.2.3.2 同步
在 run 函数之中,需要注意的是:在执行各种算子操作之前,会调用 self._state_holder.sync() 在各个 worker 之间进行一个状态同步,达成共识 (consensus)。
def sync(self) -> Optional[bool]:
"""See base class."""
state_bits: Optional[bytes] = None
token = None
has_set: Optional[bool]
if self._dirty: # 如果本node状态变化了
has_set = False
state_bits = pickle.dumps(self._state)
# 把自己的状态设置到backend之中
set_response = self._backend.set_state(state_bits, self._token)
if set_response is not None:
state_bits, token, has_set = set_response
else: # 自己没变化,只能从后端获取
has_set = None
if self._cache_duration > 0:
# Avoid overloading the backend if we are asked to retrieve the
# state repeatedly. Try to serve the cached state.
if self._last_sync_time >= max(time.monotonic() - self._cache_duration, 0):
return None
get_response = self._backend.get_state() # 从backend获取其他节点最新状态
if get_response is not None:
state_bits, token = get_response
if state_bits is not None:
try:
self._state = pickle.loads(state_bits) # 用后端状态更新本身的状态
except pickle.PickleError as exc:
raise RendezvousStateError(
"The rendezvous state is corrupt. See inner exception for details."
) from exc
else:
self._state = _RendezvousState()
if has_set and self._dead_nodes and log.isEnabledFor(logging.DEBUG):
node_list = ", ".join(f"\'dead_node\'" for dead_node in self._dead_nodes)
msg = (
f"As part of the sync operation the node(s) node_list have been removed from the "
f"rendezvous \'self._settings.run_id\' since they had no heartbeat."
)
self._record(message=msg)
self._token = token
self._dirty = False
self._last_sync_time = time.monotonic()
self._sanitize()
return has_set
后端
torch/distributed/elastic/rendezvous/c10d_rendezvous_backend.py 之中是对应后端代码。
后端这里使用 store 作为一个集中式存储,是master。每个 node 是 client,会去master更新自己状态,并且获取其他node状态。这样所有node就会互通有无,达成共识。这里也会定期删除不更新元数据的clients。
get_state 就是简单的从 store 提取。
def get_state(self) -> Optional[Tuple[bytes, Token]]:
"""See base class."""
base64_state: bytes = self._call_store("get", self._key)
return self._decode_state(base64_state)
set_state 会做一个compare set,其返回new state和是否更新了state。
def set_state(
self, state: bytes, token: Optional[Token] = None
) -> Optional[Tuple[bytes, Token, bool]]:
"""See base class."""
base64_state_str: str = b64encode(state).decode()
if token:
# Shortcut if we know for sure that the token is not valid.
if not isinstance(token, bytes):
result = self.get_state()
if result is not None:
tmp = *result, False
# Python 3.6 does not support tuple unpacking in return
# statements.
return tmp
return None
token = token.decode()
else:
token = self._NULL_SENTINEL
base64_state: bytes = self._call_store("compare_set", self._key, token, base64_state_str)
state_token_pair = self._decode_state(base64_state)
if state_token_pair is None:
return None
new_state, new_token = state_token_pair
# C10d Store\'s compare_set method does not offer an easy way to find out
# whether our write attempt was successful. As a brute-force solution we
# perform a bitwise comparison of our local state and the remote state.
return new_state, new_token, new_state == state
_sanitize
_sanitize 方法用来依据其他节点消息做处理,比如清理故障节点。即,如果上一次的心跳时间超过了一定阈值范围,则会把这些节点标记为dead_node,并且从 participant或者wait list中清除这些节点。
def _sanitize(self) -> None:
state = self._state
expire_time = datetime.utcnow() - (
self._settings.keep_alive_interval * self._settings.keep_alive_max_attempt
)
# Filter out the dead nodes.
self._dead_nodes = [
node
for node, last_heartbeat in state.last_heartbeats.items()
if last_heartbeat < expire_time
]
participant_removed = False
for dead_node in self._dead_nodes:
del state.last_heartbeats[dead_node] # 移除故障节点
try:
del state.participants[dead_node] # 移除故障节点
participant_removed = True
except KeyError:
pass
try:
state.wait_list.remove(dead_node) # 移除故障节点
except KeyError:
pass
if participant_removed:
# Common epilogue shared with the _remove_from_participants()
# function of _DistributedRendezvousOpExecutor.
_remove_participant_epilogue(state, self._settings)
介绍完毕如何运行引擎,我们接下来看看具体算子。
0x03 算子
_RendezvousOpExecutor 引擎的业务逻辑被分成两层:用户操作 和 内部业务逻辑。用户操作和内部业务机制之间被解耦。
-
用户操作被分成各种算子,包括:心跳,Join,关闭,结束。比如Join 算子就是
_RendevzousJoinOp。 -
内部业务逻辑被分成各种业务函数,比如 _add_to_participants 方法从等待列表中移除节点,往 participants 加入这个节点。
-
算子和内部业务逻辑并不是一一对应,需要一个类似状态机的机制来控制。
- 比如,心跳操作算子的结果可能是:超时/keep alive/正常结束,所以应该根据这个结果调用不同的内部业务函数。这种对应关系逻辑就是通过 Action 来完成的。
- 各种算子联合起来,聚合成了一个状态机。
- 算子内部就是生成各种 Action,决定了状态机的下一步操作。
-
引擎内部就是根据 Action 来执行具体业务逻辑,或者可以说,是通过 Action 进行解耦。
具体如下,引擎从逻辑上可以分成三层:最上面是算子层,中间是 Action 层,下面是业务函数层。
+-----------------------------------------------------------------------------------------+
| |
| _RendezvousKeepAliveOp _RendezvousCloseOp _RendezvousExitOp _RendezvousJoinOp |
| |
+-------------+---------------------+--------------------+------------------+-------------+
| | | |
| | | |
| | | |
| | | |
v v v v
+-----------------------------------------------------------------------------------------+
| |
| KEEP_ALIVE ADD_TO_PARTICIPANTS ADD_TO_WAIT_LIST REMOVE_FROM_WAIT_LIST ...... |
| |
+-------------+----------+----------+----------+---------+---------+---------+------------+
| | | | | | |
| | | | | | |
| | | | | | |
| | | | | | |
v v v v v v v
+-----------------------------------------------------------------------------------------+
| |
| _add_to_participants _remove_from_participants _add_to_wait_list ...... |
| |
| |
+-----------------------------------------------------------------------------------------+
我们逐一解析。
3.1 操作
先来解析中间层 Action,看看有多少 Action。基于 rendezvous 的状态,引擎的actions具体如下。代码位于 torch/distributed/elastic/rendezvous/dynamic_rendezvous.py
class _Action(Enum):
"""Specifies the possible actions based on the state of the rendezvous."""
KEEP_ALIVE = 1
ADD_TO_PARTICIPANTS = 2
ADD_TO_WAIT_LIST = 3
REMOVE_FROM_PARTICIPANTS = 4
REMOVE_FROM_WAIT_LIST = 5
MARK_RENDEZVOUS_COMPLETE = 6
MARK_RENDEZVOUS_CLOSED = 7
SYNC = 8
ERROR_CLOSED = 9
ERROR_TIMEOUT = 10
FINISH = 11
3.2 算子
引擎之中实现了一些算子,基本上,一个操作对应一个算子,我们给出几个操作算子的例子,算子就是依据rendezvous的状态来设置操作类型。
3.2.1 心跳
3.2.1.1 检查心跳
_RendezvousKeepAliveOp 的作用是:依据当前状态和时间来确定下一步Action。主要是定期检查本Node是否故障。
class _RendezvousKeepAliveOp:
"""Represents a rendezvous keep-alive update operation."""
def __call__(self, ctx: _RendezvousContext, deadline: float) -> _Action:
if _should_keep_alive(ctx):
if time.monotonic() > deadline:
return _Action.ERROR_TIMEOUT
return _Action.KEEP_ALIVE
return _Action.FINISH
_should_keep_alive 方法为:
def _should_keep_alive(ctx: _RendezvousContext) -> bool:
"""Determines whether a keep-alive heartbeat should be sent."""
try:
last_heartbeat = ctx.state.last_heartbeats[ctx.node]
except KeyError:
return False
return last_heartbeat <= datetime.utcnow() - ctx.settings.keep_alive_interval
3.2.1.2 定期调用
这里要注意的是,因为做任何算子之前,都要调用 sync 操作,而 sync 会在 node 之间同步状态,因为心跳是定期的,所以同步状态也是定期的。
DynamicRendezvousHandler 之中会启动一个timer,定期调用_keep_alive_weak方法。
def _start_heartbeats(self) -> None:
self._keep_alive_timer = _PeriodicTimer(
self._settings.keep_alive_interval, self._keep_alive_weak, weakref.ref(self)
)
self._keep_alive_timer.set_name(f"RendezvousKeepAliveTimer_self._this_node.local_id")
self._keep_alive_timer.start()
其次,_keep_alive_weak 会调用 self._keep_alive()。
@staticmethod
def _keep_alive_weak(weak_self) -> None:
self = weak_self()
if self is not None:
self._keep_alive()
_keep_alive 会调用 _RendezvousKeepAliveOp。
def _keep_alive(self) -> None:
self._heartbeat_lock.acquire()
op = _RendezvousKeepAliveOp()
deadline = self._get_deadline(self._settings.timeout.heartbeat)
try:
self._op_executor.run(op, deadline)
msg = (
f"The node \'self._this_node\' has sent a keep-alive heartbeat to the rendezvous "
f"\'self._settings.run_id\'."
)
self._record(message=msg)
log.debug(msg)
except RendezvousError as ex:
msg = (
f"The node \'self._this_node\' has failed to send a keep-alive heartbeat to the "
f"rendezvous \'self._settings.run_id\' due to an error of type type(ex).__name__."
)
self._record(message=msg, node_state=NodeState.FAILED)
finally:
self._heartbeat_lock.release()
3.2.1.2 设置心跳
另外,_DistributedRendezvousOpExecutor 有一个 _keep_alive 同名函数,是用来实现内部逻辑,我们后续会讲到。
3.2.2 关闭
_RendezvousCloseOp 会依据当前状态和时间来确定下一步Action。
class _RendezvousCloseOp:
"""Represents a rendezvous close operation."""
def __call__(self, ctx: _RendezvousContext, deadline: float) -> _Action:
if ctx.state.closed:
return _Action.FINISH
if time.monotonic() > deadline:
return _Action.ERROR_TIMEOUT
return _Action.MARK_RENDEZVOUS_CLOSED
3.2.3 结束
_RendezvousExitOp 依据当前状态和时间来确定下一步Action。如果本Node不在participants之中,不处理。否则返回一个从 participants 列表删除的下一步Action。如果超时则返回对应Action。
class _RendezvousExitOp:
"""Represents a rendezvous exit operation."""
def __call__(self, ctx: _RendezvousContext, deadline: float) -> _Action:
if ctx.node in ctx.state.participants:
if time.monotonic() > deadline:
return _Action.ERROR_TIMEOUT
return _Action.REMOVE_FROM_PARTICIPANTS
return _Action.FINISH
3.2.4 Join
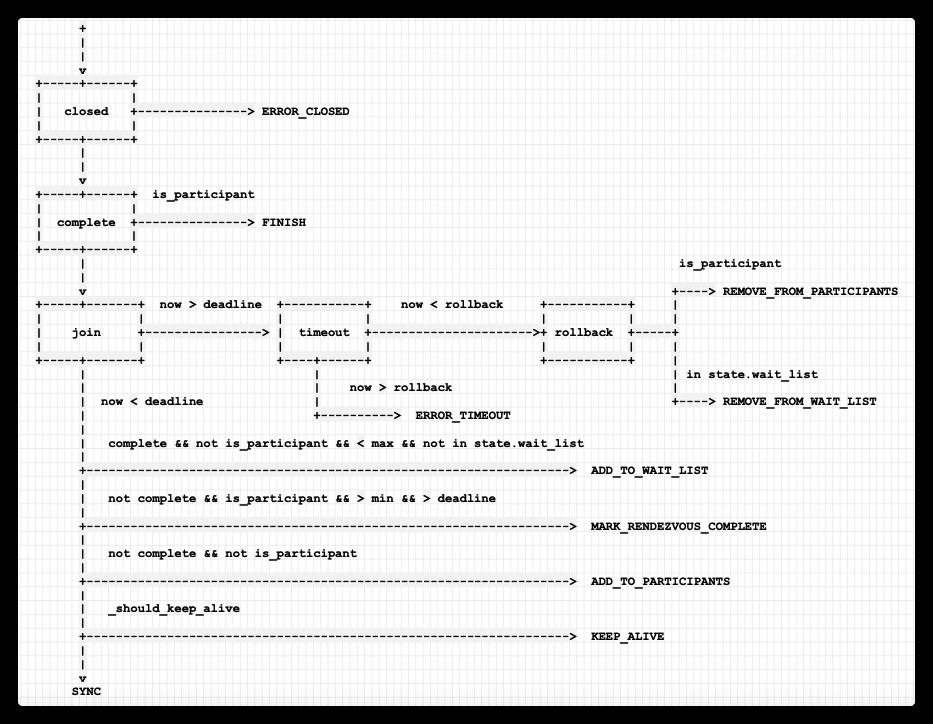
_RendezvousJoinOp 这里依据系统状态不同,做不同处理,比如试图把本Node加入到participant,或者 waiting list,或者继续等待,具体可以参见代码注释。
- 从上下文之中提取 _RendezvousState 状态,把结果存放在 state 之中。
- 如果状态是closed,则说明此时rendezvous已经结束,则返回_Action.ERROR_CLOSED。
- 看看是不是参与者,把结果存放在is_participant。
- 如果状态已经结束,且本节点已经是参与者,则说明 rendezvous 可以结束,返回 _Action.FINISH。
- 获取当前时间 now。
- 如果 now > deadline,说明已经超时。
- 如果还有时间做 rollback,说明本节点要返回之前的状态。
- 如果本节点已经是参与者,说明此时总节点数目没有达到 min,虽然已经是参与者,但是需要从参与者列表移除,所以返回 _Action.REMOVE_FROM_PARTICIPANTS。
- 如果本节点在等待列表之中,说明此时总节点数目没有达到 max,虽然在等待列表之中,但是需要从等待列表移除,所以返回_Action.REMOVE_FROM_WAIT_LIST。
- 否则返回_Action.ERROR_TIMEOUT。
- 如果还有时间做 rollback,说明本节点要返回之前的状态。
- 否则没有超时,继续处理。
- 如果state.complete 并且本节点不是参与者(如果节点是参与者,前面已经处理过了),说明rendezvous 已经结束,如果还没有达到最大节点数目,并且当前node不在等待列表之中,就需要添加到等待节点列表,等待下次监控周期到的时候,重新做rendezvous,就可以把等待列表中的节点加入到参与列表之中。所以返回_Action.ADD_TO_WAIT_LIST。
- 如果本节点是参与者并且state不是complete状态(如果是complete状态,前面已经处理过了),如果已经达到了最小节点数 & 已经超时了,则说明rendezvous 已经结束,则返回_Action.MARK_RENDEZVOUS_COMPLETE。
- 否则说明没结束,本节点也不是参与者,则直接加入到参与者列表,返回_Action.ADD_TO_PARTICIPANTS。
- 如果需要保持心跳,就返回 _Action.KEEP_ALIVE。
- 否则返回_Action.SYNC。
class _RendezvousJoinOp:
"""Represents a rendezvous join operation."""
def __call__(self, ctx: _RendezvousContext, deadline: float) -> _Action:
state = ctx.state # 从上下文之中提取 _RendezvousState 状态
# A closed rendezvous means that it no longer accepts new nodes.
if state.closed:
return _Action.ERROR_CLOSED # 如果已经结束,就返回 _Action.ERROR_CLOSED
is_participant = ctx.node in state.participants # 看看是不是参与者
# If we are part of the rendezvous and it is already complete there is
# no further action to take.
if state.complete and is_participant: # 如果是参与者且状态是结束,就返回 _Action.FINISH
return _Action.FINISH
now = time.monotonic()
if now > deadline: # 如果已经超时
rollback_period = 5 # 5 seconds
# If we still have time to rollback (a short period on top of the
# operation deadline), try to remove ourself from the rendezvous.
# It is okay if we can\'t though as our keep-alive will eventually
# expire.
if now <= deadline + rollback_period: # 如果还有时间来 rollback
# If we are part of the rendezvous, it means we couldn\'t find
# enough participants to complete it on time.
if is_participant: # 此时尚未达到min,虽然已经是参与者,但是需要移除
return _Action.REMOVE_FROM_PARTICIPANTS # 需要从参与者列表移除
# If we are in the wait list, it means we couldn\'t wait till the
# next round of the rendezvous.
if ctx.node in state.wait_list: # 此时已经达到 max,虽然已经在等待列表之中,需要移除
return _Action.REMOVE_FROM_WAIT_LIST # 需要从等待列表移除
return _Action.ERROR_TIMEOUT # 返回超时
if state.complete: # 如果 rendezvous 已经结束
# If we are here, it means we are not part of the rendezvous. In
# case the rendezvous has capacity for additional participants add
# ourself to the wait list for the next round.
if len(state.participants) < ctx.settings.max_nodes: # 如果还没有达到最大节点数
if ctx.node not in state.wait_list: # 如果当前node不在等待列表之中
return _Action.ADD_TO_WAIT_LIST # 就加入到等待列表,发送一个等待action
elif is_participant: # 如果已经在参与者列表
# If the rendezvous has enough number of participants including us,
# check whether we have passed the rendezvous deadline. If yes,
# complete it.
if len(state.participants) >= ctx.settings.min_nodes: # 如果达到了最小节点数
if cast(datetime, state.deadline) < datetime.utcnow(): # 如果达到了超时
return _Action.MARK_RENDEZVOUS_COMPLETE # 标示 rendezvous 已经结束
else: # 否则就直接加入到参与者
# The rendezvous is not complete yet and we are not part of it. Try
# to join.
return _Action.ADD_TO_PARTICIPANTS
if _should_keep_alive(ctx): # 如果需要保持心跳,就返回 _Action.KEEP_ALIVE
return _Action.KEEP_ALIVE
# At this point either the rendezvous is not complete, but we are part
# of it, which means we have to wait for other participants to join; or
# the rendezvous is complete, but we are not part of it, which means we
# have to wait for the next round.
return _Action.SYNC # 否则返回同步状态 _Action.SYNC
具体逻辑如下:
state.closed
+--------------------------> _Action.ERROR_CLOSED
|
|
| complete & participant
+--------------------------> _Action.FINISH
|
|
| timeout & participant
+--------------------------> _Action.REMOVE_FROM_PARTICIPANTS
|
|
| timeout & wait
+--------------------------> _Action.REMOVE_FROM_WAIT_LIST
|
+-------------------+ |
| | | timeout
| _RendezvousJoinOp +------------------------------> _Action.ERROR_TIMEOUT
| | |
+-------------------+ | complete & < max & not wait
|
+--------------------------> _Action.ADD_TO_WAIT_LIST
|
| complete & participant & > min & deadline
|
+--------------------------> _Action.MARK_RENDEZVOUS_COMPLETE
|
| not complete & not participant
|
+--------------------------> _Action.ADD_TO_PARTICIPANTS
|
| _should_keep_alive
|
+--------------------------> _Action.KEEP_ALIVE
|
| else
|
+--------------------------> _Action.SYNC
以下是源码之中 ETCD 后端 Rendezvous 状态描述图,我们可以大致参考比对 c10d的状态。
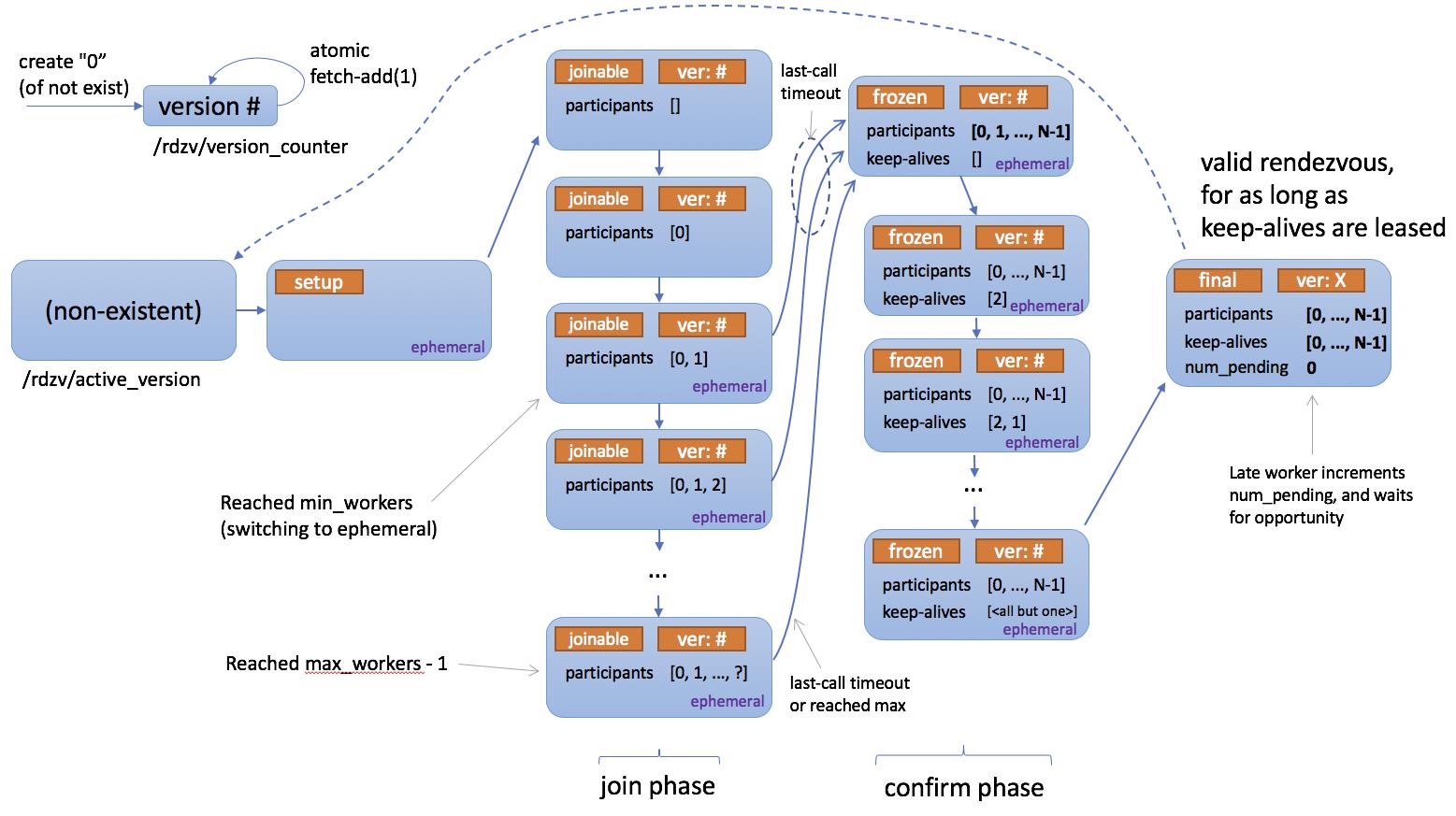
可见,etcd 后端的Join可以分为4个阶段:
- setup 阶段,会往固定目录写一个值,这是一个排他锁,如果写失败,说明目前正有一个
rendezvous过程在进行中。 - join(joinable) 阶段。如果写值成功,则进入join 阶段。如果在等待时间结束或者参与训练的节点达到了最大值,则进入 frozen 阶段。
- frozen(confirm)阶段。需要所有节点都确认,进入最后的 final 阶段。
- final 阶段。分配rank,
RANK 0的实例成为 master。
仿照上图,我们把 c10d 拓展如下。
+
|
|
v
+-----+------+
| |
| closed +---------------> ERROR_CLOSED
| |
+-----+------+
|
|
v
+-----+------+ is_participant
| |
| complete +---------------> FINISH
| |
+-----+------+
| is_participant
|
v +----> REMOVE_FROM_PARTICIPANTS
+-----+-------+ now > deadline +-----------+ now < rollback +-----------+ |
| | | | | | |
| join +----------------> | timeout +---------------------->+ rollback +-----+
| | | | | | |
+-----+-------+ +----+------+ +-----------+ |
| | | in state.wait_list
| | now > rollback |
| now < deadline | +----> REMOVE_FROM_WAIT_LIST
| +----------> ERROR_TIMEOUT
|
| complete && not is_participant && < max && not in state.wait_list
|
+------------------------------------------------------------------> ADD_TO_WAIT_LIST
|
| not complete && is_participant && > min && > deadline
|
+------------------------------------------------------------------> MARK_RENDEZVOUS_COMPLETE
|
| not complete && not is_participant
|
+-----------------------------------------> ADD_TO_PARTICIPANTS
|
| _should_keep_alive
|
+---------------------------> KEEP_ALIVE
|
|
v
SYNC
手机如下:
0x04 业务操作
_DistributedRendezvousOpExecutor.run 的内部就是依据 action 选择不同的业务函数来执行。
if action == _Action.KEEP_ALIVE:
self._keep_alive()
elif action == _Action.ADD_TO_PARTICIPANTS:
self._add_to_participants()
elif action == _Action.ADD_TO_WAIT_LIST:
self._add_to_wait_list()
elif action == _Action.REMOVE_FROM_PARTICIPANTS:
self._remove_from_participants()
elif action == _Action.REMOVE_FROM_WAIT_LIST:
self._remove_from_wait_list()
elif action == _Action.MARK_RENDEZVOUS_COMPLETE:
self._mark_rendezvous_complete()
elif action == _Action.MARK_RENDEZVOUS_CLOSED:
self._mark_rendezvous_closed()
我们接下来就看看具体这些内部函数逻辑。
4.1 加入参与者
接受到 ADD_TO_PARTICIPANTS 之后,调用 _add_to_participants 从等待列表中移除节点,往 participants 加入这个节点。
def _add_to_participants(self) -> None:
state = self._state
try:
state.wait_list.remove(self._node)
except KeyError:
pass
# The ranks of the participants will be set once the rendezvous is
# complete.
state.participants[self._node] = 0
self._keep_alive()
if len(state.participants) == self._settings.min_nodes:
state.deadline = datetime.utcnow() + self._settings.timeout.last_call
if len(state.participants) == self._settings.max_nodes:
self._mark_rendezvous_complete()
4.2 移除参与者
接受到 REMOVE_FROM_PARTICIPANTS 之后,调用 _remove_from_participants 从 participants 和 last_heartbeats 中删除参与者。
def _remove_from_participants(self) -> None:
state = self._state
del state.participants[self._node]
del state.last_heartbeats[self._node]
if state.complete:
# If we do not have any participants left, move to the next round.
if not state.participants:
state.complete = False
state.round += 1
else:
if len(state.participants) < self._settings.min_nodes:
state.deadline = None
4.3 加入等待序列
接受到 ADD_TO_WAIT_LIST 之后,调用 _add_to_wait_list 网 wait_list 中加入节点。
def _add_to_wait_list(self) -> None:
self._state.wait_list.add(self._node)
self._keep_alive()
4.4 移除等待序列
接受到 REMOVE_FROM_WAIT_LIST 之后,调用 _remove_from_wait_list 从 wait_list 移除节点。
def _remove_from_wait_list(self) -> None:
self._state.wait_list.remove(self._node)
del self._state.last_heartbeats[self._node]
4.5 设置结束
接受到 MARK_RENDEZVOUS_COMPLETE 之后,当 rendezvous 聚合操作结束之后,给每一个参与者设置 rank。
每个节点上都是按照同样算法排序,所以rank在每个节点上都是一样的。
def _mark_rendezvous_complete(self) -> None:
state = self._state
state.complete = True
state.deadline = None
# Assign the ranks.
for rank, node in enumerate(sorted(state.participants)):
state.participants[node] = rank
def _mark_rendezvous_closed(self) -> None:
self._state.closed = True
4.6 心跳
接收到 KEEP_ALIVE action之后,会调用到 _keep_alive 来维持心跳。另外,keep_alive 也会在 _add_to_participants等方法内被调用,会更新本地state之中的last heartbeats,下一次 sync 时候,会把 last_heartbeats 写入键值存储,这样其他Node就可以知道这个节点的状态了。而本地则会在 _sanitize 之中依据 last_heartbeats 做处理,我们之前提到过。
def _keep_alive(self) -> None:
msg = (
f"The node \'self._node\' updated its keep-alive heartbeat time for the rendezvous "
f"\'self._settings.run_id\'. Pending sync."
)
self._record(message=msg)
self._state.last_heartbeats[self._node] = datetime.utcnow()
_record 方法如下:
def _record(self, message: str, node_state: NodeState = NodeState.RUNNING) -> None:
construct_and_record_rdzv_event(
name=f"self.__class__.__name__.get_method_name()",
run_id=self._settings.run_id,
message=message,
node_state=node_state,
hostname=self._node.fqdn,
pid=self._node.pid,
local_id=self._node.local_id,
)
其就是调用如下代码记录log。
def record_rdzv_event(event: RdzvEvent) -> None:
_get_or_create_logger("dynamic_rendezvous").info(event.serialize())
def construct_and_record_rdzv_event(
run_id: str,
message: str,
node_state: NodeState,
name: str = "",
hostname: str = "",
pid: Optional[int] = None,
master_endpoint: str = "",
local_id: Optional[int] = None,
rank: Optional[int] = None,
) -> None:
# We don\'t want to perform an extra computation if not needed.
if isinstance(get_logging_handler("dynamic_rendezvous"), logging.NullHandler):
return
# Set up parameters.
if not hostname:
hostname = socket.getfqdn()
if not pid:
pid = os.getpid()
# Determines which file called this function.
callstack = inspect.stack()
filename = "no_file"
if len(callstack) > 1:
stack_depth_1 = callstack[1]
filename = os.path.basename(stack_depth_1.filename)
if not name:
name = stack_depth_1.function
# Delete the callstack variable. If kept, this can mess with python\'s
# garbage collector as we are holding on to stack frame information in
# the inspect module.
del callstack
# Set up error trace if this is an exception
if node_state == NodeState.FAILED:
error_trace = traceback.format_exc()
else:
error_trace = ""
# Initialize event object
event = RdzvEvent(
name=f"filename:name",
run_id=run_id,
message=message,
hostname=hostname,
pid=pid,
node_state=node_state,
master_endpoint=master_endpoint,
rank=rank,
local_id=local_id,
error_trace=error_trace,
)
# Finally, record the event.
record_rdzv_event(event)
至此,引擎部分也已经分析完毕,下一篇我们看看是否可以从整体角度再做一下全面梳理。
0xFF 参考
[源码解析] PyTorch 分布式之弹性训练(1) --- 总体思路
[源码解析] PyTorch 分布式之弹性训练(2)---启动&单节点流程
以上是关于[源码解析] PyTorch 分布式之弹性训练---Rendezvous 引擎的主要内容,如果未能解决你的问题,请参考以下文章