RAW域算法处理之LDC
Posted lanlancky
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了RAW域算法处理之LDC相关的知识,希望对你有一定的参考价值。
镜头畸变校正lens distortion correction
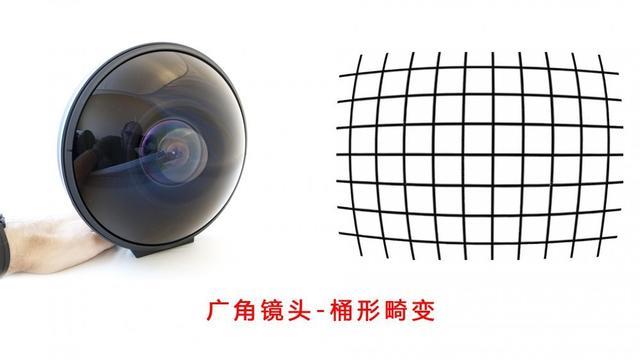
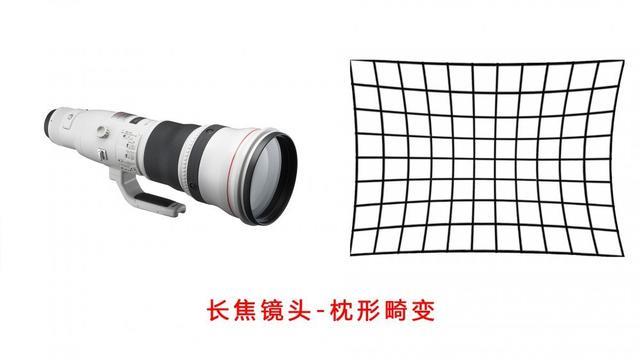
常见的镜头畸变有两种,一种是桶形失真,常出现于短焦大视角镜头;一种是枕形失真,常出现于变焦镜头的长焦段,如图所示。通过镜头畸变校正期望校正后的图像中垂直和水平直线依然保持垂直和水平。
校正算法原理:一般分两步,首先通过 calibration 或其他手段建立镜头畸变的数学模型。获取校正后图像像素坐标在原始图像中的坐标。其次,根据该坐标去原姶图像中取点,若该坐标为小数,则选取该坐标整数部分周围点像素值内插得到校正后像素值。
畸变实际上指的是你拍出来的物体相对于物体本身而言的失真了。拍出来的东西变形了。
比如这样,墙边的本来应该是直的,拍出来确是弯的。

大楼本来是直上直下的,但是拍出来边线是弯的。

这些都属于镜头畸变,畸变是一种像差,是镜头引起了物体成像的变形,但是对成像的清晰度没有影响。
我们来看刚才的这两张样片,最直观的感受就是原本应该是直线的地方,照出来变弯曲了,这面墙好像凸出来了,这个大楼好像陷进去了
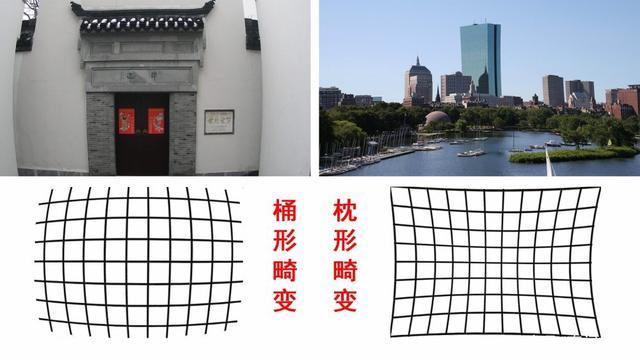
我们管凸出来的这个这种畸变效果叫桶形畸变,陷进去的这种畸变叫枕形畸变。这类的畸变我们统称为镜头畸变。
镜头畸变原因
这些畸变其实是镜头镜片系统的放大率差异导致的。
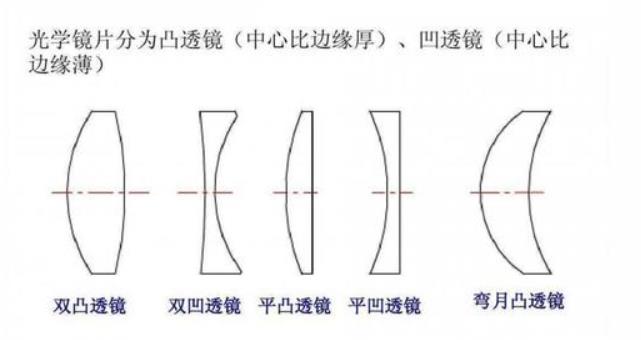
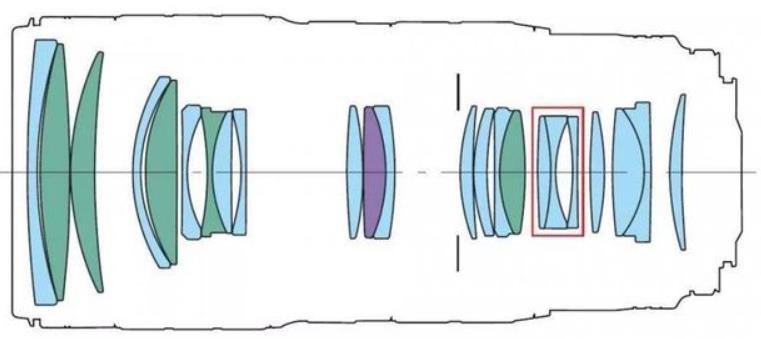
我们都知道透镜的中心和边缘厚度是不一样的,中间厚边缘薄的叫凸透镜,中间薄边缘厚的叫凹透镜,镜头就是由多组透镜来组成的一个光学设备。
对于理想光学系统,在一对共轭的物像平面上,放大率是常数。
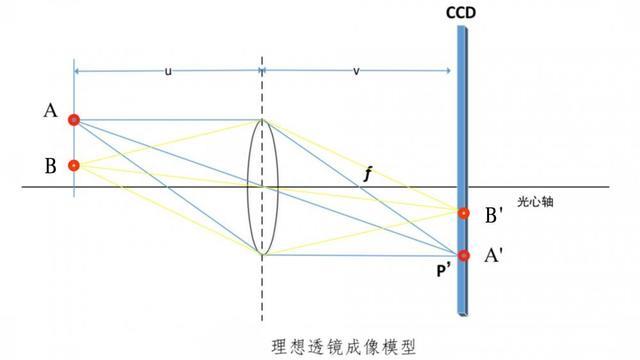
但是对于实际的使用中的光学系统,几乎很难做到理想状态那样,因为透镜的放大率随光束和主轴间所成角度改变而改变。
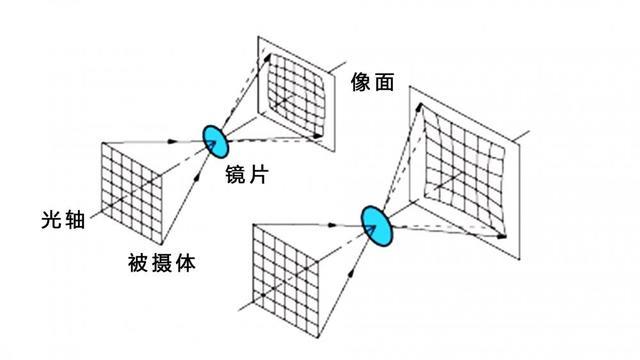
通常来说啊,光线与主轴正交并通过主轴,不产生畸变,光线离主轴越远,畸变越大,当放大率随入射角度增加而增大时称正畸变。也就是我们说的枕形畸变

放大率随入射角度增加而减小时负畸变。也就是桶形畸变。

特别是镜片屈光度大的时候,这种畸变现象就比较严重。像这样的畸变是跟镜头固有特性有关(凸透镜汇聚光线、凹透镜发散光线)的,是无法完全消除的,只能改善,任何一只镜头从工厂出厂后,它的畸变率就固定下来。通常来说我们相机镜头的畸变率一般都是控制在百分之零点几这样。
我们需要记住是桶形畸变一般是由广角镜头产生的,而枕形畸变一般是因为长焦镜头产生的。
这类的镜头畸变只和镜头焦距有关,和其他因素都没有关系。
当然镜头畸变的另外一种表现形式是线性畸变,就是当我们试图近距离拍摄一些笔直高大的建筑的时候,实际上平行的线条显得并不平行了,边线弯了,很别扭,这种我们叫它线性畸变。
如何消除畸变
通常来说镜头畸变是没办法完全消除的,只能改善。一般情况下,改善这类畸变有两种办法
1、可以通过软件进行校正,我们通过计算出镜头的畸变系数,用软件处理一下就可以了
2、再有就是可以从镜头硬件本身入手,可以通过优化镜片组的设计
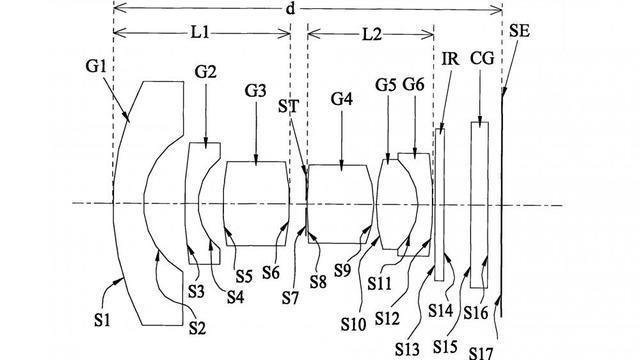
或者选用高质量的光学玻璃(如萤石玻璃)来制造镜片,都可以使畸变降到很低的程度。
但是完全消除畸变是不可能的,目前最高质量的镜头在极其严格的条件下测试,在镜头的边缘也会产生不同程度的变形和失真。
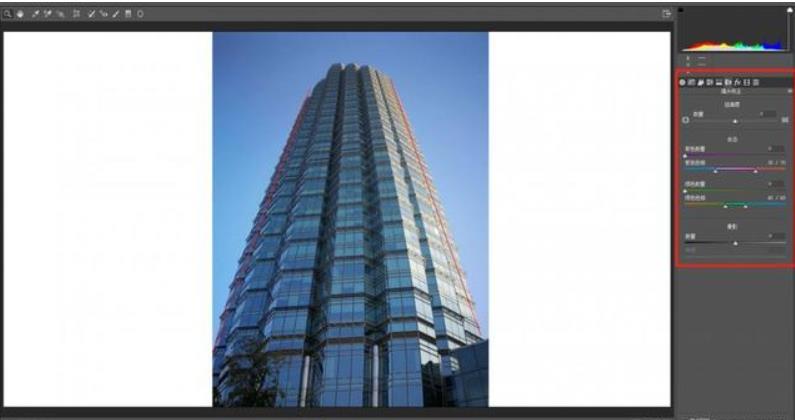
枕形畸变改善我们在实际拍摄处理过程中,像枕形畸变,我们可以用PS来校正畸变,也可以在拍摄之前构图的时候多留出一些余量,因为镜头中间部分形变少,我们后期通过裁剪把形变少的部分裁切出来也是可以的
桶形畸变改善通常来讲是我们使用软件进行桶形畸变校正就可以了,很少用裁剪的方法,因为你为了拍大场景,才选的广角镜头,如果你再裁掉一些,那还不如选用标准镜头拍摄呢。
线性畸变改善像建筑摄影里经常出现的线性畸变,解决这个问题,其实也简单,你只要保证你照相机的成像平面和你所拍的建筑物正面平行就可以了,就消费机而言你照相机的显示屏和建筑物正面平行就可以了。

镜头偏色校正(Lens chromatic aberration correction)
镜头偏色一般多出现于劣质镜头。具体是指镜头无法将不同波长的光线聚焦在一起。
所以 RGB 三通道的图像没有完全重合在一起,在物体的边缘很容易观察到假色。
图10镜头偏色校正前后对比图
校正算法原理:一般分两步,首先消除镜头畸变(桶形或者枕形失真),其次以某一颜色通道为基准(一般选择绿色),对其他两个颜色通道的图像做平移或 Scaling 运算确保校正后的三通道图像重合。
以上是关于RAW域算法处理之LDC的主要内容,如果未能解决你的问题,请参考以下文章