阳极PID
Posted guoyang0709
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了阳极PID相关的知识,希望对你有一定的参考价值。
/* 阳极状态:
* 1. 0.8 ->boost;
* 2. 1.3 ->run;
* 3. 1.8 ->brake;
* 4. 0V ->idle.
0.6->1->1.4
*/
TIM1 0.1ms进入一次中断
RotorMainCur_Buf =ADC2->DR; //ADC2 IN14
RotorMainCur_dot1ms +=RotorMainCur_Buf; //0.1ms累计
RotorMainCur_1ms =RotorMainCur_dot1ms/10; //1ms将累计10次的值求平均值
RotorMainCur_dot1ms =0; //1ms累计值清零
对反馈值消抖,输出:RotorMainCur_1ms
TIM2 1ms 进入一次中断
RotorMainCur_10ms +=RotorMainCur_1ms; //1ms累计
rotor_10ms_temp =RotorMainCur_10ms / 10; //10ms累计10次的值求平均值
RotorStandbyCur_Ain = rotor_10ms_temp;
if(RotorStandbyCur_Ain > MAX_ROTOR_RUN_CUR)
连续10000ms报:阳极静态电流高 999
Precharge信号关闭,停止阳极供电
RotorMainCur_Ain = rotor_10ms_temp;
if(RotorMainCur_Ain < MIN_ROTOR_MAIN_CUR) //90 0.6A
连续500ms报:主绕组欠电流
if(RotorMainCur_Ain > MAX_ROTOR_RUN_CUR) //680
连续500ms报:阳极主绕组电流高 998
数码管共阳极与共阴极的区别
不知道大家在做单片机显示这一块时对图片做取模是否遇到过这样的问题,在某些取模软件上会有阴码和阳码两种编码:
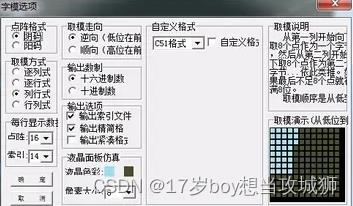
在取模时如果编码选择与板子上的数码管极性不同会导致显示不对或者无法显示的问题,这个原因是与数码管的公共端接法有关,在数码管中有两种公共端接法:
1.共阳极
将数码管的正极并联在一起,负极作为输入端,负极不会并联,共阳极一般不会用,因为一般不同的数码管所使用的电压不同,如果使用同一正极会导致功耗负载过大

2.共阴极
将负极并联在一起,正极作为输入,这个会比较常用,因为正极使用单独的供电可以适配不同电压
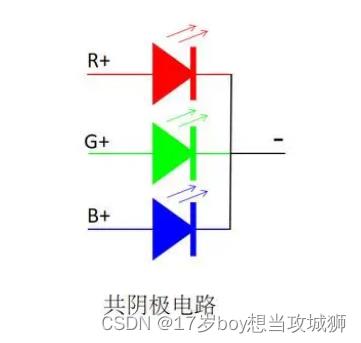
核心原理
无论是共阴还是共阳都是利用了最基础的回路电路,数码管需要回路才能让电子流动并产生能量点亮数码管,这里以共阳为例,共阳正极一直处于高电平,负极一定是用于产生回路的,所以负极不能是高电平,换句话说负极不能有任何电流,但是我们可以给负极接一根PIN脚,给它发送高电平将回路堵死,这样就可以让其不点亮,如果想要数码管点亮则不给电平(低电平)即可,所以这也是为什么共阳是低电平驱动,共阴是高电平驱动
以上是关于阳极PID的主要内容,如果未能解决你的问题,请参考以下文章