车载测试系列:汽车ECU通信之时间同步测试验证
Posted 千里和他的软件测试
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了车载测试系列:汽车ECU通信之时间同步测试验证相关的知识,希望对你有一定的参考价值。
时钟同步功能给车载系统提供统一的时间基准,在高级别智能驾驶、视音频时钟同步、数据上传分析等场景中发挥着越来越重要的作用。目前以太网时钟同步协议中,使用最多的为精准时钟同步协议(Generalized Precision Time Protocol, gPTP),遵循 IEEE 802.1AS 标准。在 AUTOSAR 中也有对应的模块eth_stync 实现该协议。
1.需求分析
gPTP 分为 Grand Master 和 slave,顾名思义,前者为系统中提供授时的节点,后者将自己的本地时间同步到 Grand Master 的时钟进行同步。gPTP 网络拓扑示意图如下图所示:

2.验证方法
gPTP 测试的验证与被测件的角色相关,有针对 Endpoint 的测试以及 Bridge 的测试,测试环境如下图所示:
- 电源:可模拟不同供电电压。
- 转换板:100/1000base-T1 转换为 100base-Tx/1000base-T。
- 流量仪:包含多个车载以太网接口的流量发生设备。
- 电脑:安装了测试软件的测试电脑。
3.验证范围
时间同步测试主要包含 gPTP 协议一致性测试和 gPTP 配置测试,如表 3.2-6 为网络诊断基础验证的部分用例,详细测试用例中的每条用例应包含有唯一的编号、需明确需求点、测试目的、测试环境、测试步骤、评价标准等内容。时钟同步测试验证部分用例如下表所示:
作者: 千里和他的软件测试
软件测试学习交流: 软件测试交流群 172489141
银行金融业务交流: 软件测试学习交流群 52304542
接口自动化性能交流: 一个正经的测试群 188427938
自动驾驶时代,ECU 的角色变了 | 厚势汽车
汽车产业正从过往仰赖机械元件运作,如火如荼的转向智慧连线的目标前进,进而达成自动驾驶最终目标。欲实现自动驾驶,车载网络及电子控制单元(ECU)势将有全新发展,本文主要从半导体技术的观点,审视当今的 ECU,接着再根据车载网络日后发展之可能性,说明未来 ECU 以及日后半导体技术之限制与机会。
起初,汽车主要仰赖机械元件运作,而如今汽车产业正面临转型的过渡期。随着科技进步,汽车中的部分机械元件逐渐由电子装置取代(此称电子化)。目前汽车产业正朝智慧连线车辆的目标迈进,逐步实现车辆间与车辆和基础建设间的连线,进而达到全面自动驾驶的最终目标。此目标初衷在于减少车祸事故及死亡率。90% 以上的车祸都是人为因素造成,而自动驾驶车辆将在实现汽车产业的「零事故」愿景中,扮演关键角色。
然而,自动驾驶车辆并非一蹴可几;而是须依照美国汽车工程师学会(SAE)定义的六个等级循序渐进导入。这些等级从无自动驾驶开始,升至有条件式自动驾驶,到最后的全自动驾驶(然而即使达到最高等级的自动驾驶,也需就法律层面加以说明)。
自动驾驶车辆的等级越高,驾驶人在行车期间的作用就越低,例如车速控制与转向控制,甚至于全面自动操控;此外,随着自动化等级提高,车辆也将需要更强的处理能力与感测器以及相关的网络频宽,如此也将势必为车载网络及相关的 ECU 带来全新发展。
本文将探讨未来的两种车载网络,一种是以网域运算为基础,另一种则是以中央运算平台为基础;此外也将特别说明未来可能出现的 ECU。以下先探讨 ECU 以及车载网络的现况。
ECU 与车载网络现况
现代车辆的车载网络是由许多 ECU 所组成,中/低阶车款所含的 ECU 约有三十个,高阶车款则可能高达一百个。一般的 ECU 如图 1 所示。
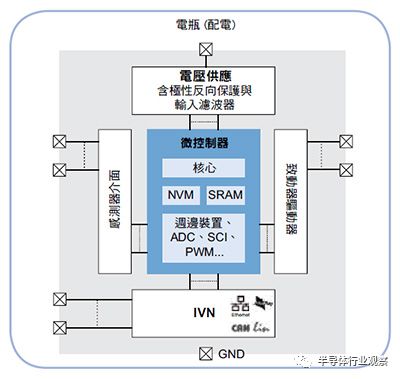
图 1 ECU 的主要区块
ECU 的分区(Partitioning)也是由半导体技术驱动。微控制器一般包含非挥发性记忆体(NVM),以便在除错或功能升级时,可直接于现场更新软体。(深)次微米CMOS 是经济实惠的技术解决方案,可将微控制器介面讯号传输的额定电压降至 5 V或 3.3 V,核心供应甚至可以更低(如 1.5 V 或 1.2 V)。
基于此原因,微控制器无法直接连接车用电瓶,两者间必须加装稳压器。然而,稳压器也必须能够承受电瓶线路的大幅电压波动与瞬变电流。此外,电瓶线路也可能出现静电放电(ESD)和电磁干扰(EMI)。
在图 1 中,其他含外部连接的区块,如车载网络(IVN)及感测器与致动器介面区块,也需要能够承受此类瞬变电流。简而言之,微控制器外围的所有区块构成了一道屏障,保护微控制器免于电压偏移,并避免可能导致微控制器损坏的情况,而此则须仰赖高电压技术。
基于这个原因,当今的 ECU 至少必须配备两项半导体技术。除此之外,感测器以及若干高功率致动器驱动器,也须要采用更先进的技术。由于图 1 仅显示两种主要技术,我们尚须评估以单一技术与装置涵盖所有功能的可行性。
即使还有最高可以达 90 V 的车用等级NVM等高电压技术,但与微控制器所使用的深次微米车用技术相较下,这些技术仍落后几个节点(特征尺寸)。
然而,数位内容与 SRMM 和 NVM 记忆体不具价格优势,尤其是 NVM,与多芯片实作相较下,此类单芯片或系统单芯片(SoC)的解决方案价格显得过高。
因此,SoC 在当今 ECU 中尚未广泛应用,而是主要用于以 LIN 为基础的从属节点,因为在此类节点中,NVM 的需求偏低,也不需要强大处理能力。
一般认知的可行做法,就是在所谓的系统基础芯片(SBC)中,结合稳压器与 IVN,或者甚至结合稳压器、IVN 和感测器介面,或定义为特殊应用标准产品(ASSP)的致动器驱动器。
上述类型产品的目的在于降低系统成本,而且由于整合式功能也须要使用高电压技术,因此在技术上完全可行。
车载网络应用多 ECU 各司其职
在当今的车载网络中,ECU 通常仅支援一种应用,如引擎控制、车窗升降机或电动辅助转向系统;例外的情况非常之少,如结合煞车与安全气囊 ECU。因此,最重要的是了解每一个专用 ECU 都要自行处理感测器资料和演算法。
以当今的煞车 ECU 为例,维持车辆稳定性和防止轮胎锁死所使用的演算法,都是由煞车 ECU 自行运行,就当今的汽车架构而言,几乎无一例外,这点将于本文其他部分进一步探讨。
以网域为基础之车载网络
图 2 说明了以多个网域为基础的车载网络。车用等级以太网络实体层(PHY)技术与交换器是此架构的要素。如图 2 所示,以太网络科技是作为通讯骨干之用,由此可知网络包含数个网域控制器。
图 2 以网域为基础的网络
其中一个就是实现(半)自动驾驶车辆关键的先进驾驶辅助系统(ADAS)网域控制器。汽车电子元件供应商针对此控制器,推出 BlueBox 开发平台,可处理来自摄影机和雷达或光达(LiDAR)的多个感测器资料串流,支援感测器融合对于自动驾驶车辆而言,是非常关键的重要功能。
BlueBox 总计具备 90000 DMIPS(Dhrystone 每秒百万条指令)的运算能力,处理器的总耗电量则不到 40 瓦。
图 2 架构得变更个别 ECU,可以在网域控制器上,执行感测器资料处理及/或执行演算法。由于所需的 NVM 较少,因此相应的 ECU 可以使用功能性较低的微控制器。在此一情况之下,感测器是位在 ECU 内部,因此不需要外部感测器连接,便能够省去使用高电压技术的耗电问题。
此外,在雷达感测器 ECU 中,可透过深次微米 CMOS 技术实现感测器介面。这也可用于实作微控制器,在结合感测器介面与微控制器的 ASSP 旁,还有一个实作 IVN 和稳压器的 SBC,用于为 ASSP 配电。
透过以太网络供电后,甚至可以省去连接电瓶及相关高电压技术的需求。如此一来可实现完全采用深次微米技术的 SoC 解决方案。
运用中央运算平台提升可扩充性
在极端情况下,还可考虑将多个或所有网域控制器合并至中央运算平台的做法,这是在 2016 年德国路德维希堡举行的汽车会议中,由多家 OEM 所提出的方案。此一做法的优点在于具备各种不同的车辆平台的可扩充性,并且可透过备用记忆体进行日后更新,但这些功能也可以在其他架构上实现。
散热绝对是这些平台的重要考量,因此可能须要使用风扇或水冷装置,虽然电动车几乎均已配备水冷装置,但仍会提高模组成本。在这些模组中,采用最先进深次微米CMOS 技术的微控制器是最理想的选择,但这些技术一般均未符合车用资格。
此外,为了顾及重要的行车安全,模组也必须符合需在开发过程和装置架构设计上采取特殊预防措施的 ISO 26262 标准。最后还须符合「零 ppm」的品质等级。在以上所有层面中,比起欲抢攻汽车市场的新半导体供应商,传统汽车半导体供应商占较大优势。探讨过中央运算平台后,接着将评估这些车载网络对个别 ECU 的影响。
在此情况中,处理作业同样不是在 ECU 上执行,代表不需要庞大的处理能力,所需的 NVM 也很小。此外,微控制器越小,就越省电,因此可缩小稳压器的规格,进而提升成本效益。
因此,所有必要功能性均可在符合成本效益的情况下,透过一个高电压半导体技术实现(包括车用等级 NVM),进而打造出以 SoC 为基础的 ECU。事实上,与当今的车辆相较下,许多 ECU 均已可达成此一实作。
SoC 将结合微控制器与稳压器、IVN 及致动器驱动器和感测器介面,进而降低系统成本。由于模组的功率消耗及实体尺寸均能缩减,因此可进一步降低整体模组成本。另外,相较于传统架构,现在需要更多频宽来支援中央网域处理模组的通讯传输。
此外,传送的资料可能攸关行车安全(如刹车或安全气囊的致动)。因此,当处理程序不是在 ECU 上执行时,便必须考量到感测器与致动器之间可能会产生额外的延迟,进而影响整个控制回路的稳定性。如此一来,便需要有(最大)延迟确保机制,这将提高 IVN 成本,但前述的系统成本降低或许可抵销提高的成本。
ECU 运算移至云端仍须克服多种挑战
我们已经讨论过将运算从 ECU 转移到网域控制器或中央运算平台的做法,但在未来的车辆架构中,也可以将部分运算功能性转移至云端。在此以由 AUDI、BMW 和Daimler 共同持有的 HERE 公司为例说明。
这项做法可提供当今导航系统所需的地图与服务,当然也可满足未来自动驾驶车辆的导航系统需求。问题在于,是否能将各类车辆所需的各种运算能力,通通转移至云端?这很快就会导致需要快速反应时间的应用程式出现问题,部分原因出在应用程式与云端通讯往返所造成的延迟时间。此外,此做法也会产生大量难以管理的资料。当然,不论是云端之间的相互连线通讯或者云端储存,资料安全性都是一大关键考量。
总而言之,未来的半自动驾驶和自动驾驶车辆,乃至于概念车(X Vehicle),均须要仰赖比当今车辆更强大的处理能力与感测器。本文说明 ECU 的现况以及此类 ECU 所使用的半导体技术。
文中也根据未来可能出现的车辆架构(例如以网域为基础的解决方案以及中央运算平台),介绍新型的 ECU。即便以上两种解决方案均各有利弊,在中短期内合理预计将会导入以网域为基础的架构,而就中央运算平台而言,安全、可靠度以及成本等因素仍有待解决,中央模组的部分尤其如此。
文章来源:半导体行业观察
责任编辑:小阳
-END-
文章精选
企业家
||
智能驾驶
新能源汽车
项目和评论
厚
势
汽
车
为您对接资本和产业
新能源汽车 自动驾驶 车联网
联系邮箱
sasa@ihoushi.com
点击阅读原文,查看文章「」
以上是关于车载测试系列:汽车ECU通信之时间同步测试验证的主要内容,如果未能解决你的问题,请参考以下文章