现在GPU是否有4核这个说法?-GPU Quad Mali 400 .是GPU4核的意思吧?
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了现在GPU是否有4核这个说法?-GPU Quad Mali 400 .是GPU4核的意思吧?相关的知识,希望对你有一定的参考价值。
mali 400是英国arm公司的移动gpu。一般mali400是单个,mali400mp2是两个,mali400mp4是4个。这个才是正确表示形式。mp是multiple的缩写,后面表示核数。
严格说mali不能算多核,一个mali400是1个多边形生成器vertex processor,vp,1个像素生成器,frame processor,fp。而mali400mp2是1gvp,两个fp,mp4是1g vp,4个fp,只是像素生成器翻倍,多边形生成器不增加。
真正能算多核的只有sgx系列,比如苹果ipad2的a5处理器的sgx543mp2是双核,iphone5的a6处理器的sgx543mp3,是三核gpu,ipad4的a6x处理器的sgx554mp4是4核gpu。
只有gpu-core的才能算多核。而且nvidIA的geforce ulp的stream pipeline,sp 流处理器不能算核,同样immersion,alu的数量再多也不算核,他们只是gpu里的一个零件,就好像轮胎和车的关系。
有些车是4个轮,有的是3轮,有的是单轮,有的是8或6个轮,但不能说一个轮胎就算是一辆车,。immersion,alu,sp的概念就像轮胎,12个sp就如同有12个轮胎的汽车,只能算一辆汽车,但你不能说因为12个轮胎所以是12辆汽车。而gpu-core的sgx系列就像车。
nvidIA的geforce,无论是12sp还是16sp还是单核,不能算12核或16核。同样海思k3v2的16个immersion,也只能算一个核,不能算16个gpu核。
但是,sgx543有4条usse管线,算一核,不能算4核gpu。sgx543mp2是两个sgx543,共8个usse管线,算双核gpu。
比如全志a30,号称8核gpu,实际上是sgx543mp2,,8条usse管线,每个gpu 4条usse管线,实际是gpu双核,故意将每条usse管线当一个核,利用别人的不知晓而实行蒙骗。 参考技术A GPU正常情况是有很多个运算内核的。通常它不具备浮点数运算单元,以及预存取单元,所以内核可以做得很小。 一个GPU通常会多大几十个甚至上百个的运算内核。
这里说到的4核应该是为了符合市场需求的一种说法,大家接受多核CPU的概念,接受起GPU4核,更容易一些。 属于市场引导性欺骗行为吧。 呵呵。 参考技术B 没听说过有四核GPU,我只知道4路GPU
牛!一块GPU顶数千个CPU内核!
点上方人工智能算法与Python大数据获取更多干货
在右上方 ··· 设为星标 ★,第一时间获取资源
仅做学术分享,如有侵权,联系删除
转载于 :机器之心
很多机器人强化学习任务都面临计算需求和仿真速度的瓶颈,而英伟达这个仿真环境可以将过去需要数千个 CPU 核参与训练的任务移植到单个 GPU 上完成训练。
强化学习已经成为机器学习中最有前途的研究领域之一,在解决复杂问题方面展现出了巨大的潜力。基于强化学习的系统在很多具有挑战性的任务中展现出了超越人类的性能,比如围棋、国际象棋、「星际争霸」、DOTA 等等。
此外,基于强化学习的方法也为机器人应用带来了希望,比如解魔方、通过模仿动物来学习运动等。
但直到现在,多数强化学习机器人研究者都不得不使用 CPU 和 GPU 的组合来运行强化学习系统。二者各司其职:CPU 用于模拟环境物理、计算奖励和运行环境,而 GPU 用于在训练和推理期间加速神经网络模型,以及在需要时进行渲染。
然而,在为序列任务优化的 CPU 内核和提供大规模并行运算的 GPU 之间来回切换本质上是低效的,需要于训练过程中在系统的不同部分之间进行多点数据传输。因此,机器人深度强化学习的可扩展性面临两个关键瓶颈:1)庞大的计算需求;2)有限的仿真速度。在拥有多个自由度的机器人学习长视野行为时,这个问题尤其具有挑战性。
流行的物理引擎,如 MuJoCo、PyBullet、DART、Drake、V-Rep 等,需要大型 CPU 集群来解决具有挑战性的强化学习任务,自然会面临这些瓶颈。例如,OpenAI 2019 年推出了一个会玩魔方的机械手,为了训练这个机械手,OpenAI 动用了大约 30,000 个 CPU 内核(920 台 32 核计算机)。
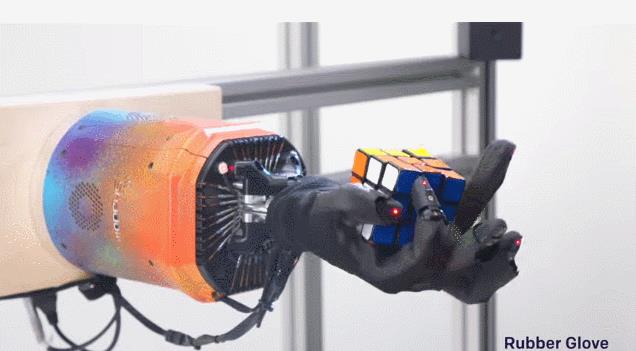
在一个类似的手持立方体定位任务中,OpenAI 也用到了 6144 个 CPU 内核组成的 384 个系统集群,再加上 8 个 Volta V100 GPU,而且需要近 30 个小时的训练才能达到最佳效果。这种手持立方体定位任务非常复杂,背后有着复杂的物理学、动力学原理和高维连续控制空间。
加速模拟和训练的一种方法是使用硬件加速器。GPU 已经在计算机图形学中取得了巨大的成功,自然也适用于高度并行的模拟。之前已经有研究采用了这种方法,并在 GPU 上运行仿真显示了非常有前景的结果,证明使用 RL 可以极大地减少训练时间,并解决庞大的计算资源需求。然而,一些瓶颈仍然没有解决,即模拟是在 GPU 上,但物理状态被复制回 CPU。在这种模式中,观察和奖励使用优化的 c++ 代码计算,然后复制回 GPU。此外,只有简化的基于物理的场景得到了训练,而不是典型的机器人环境。
为了克服这些瓶颈,去年,英伟达发布了用于强化学习的物理模拟环境 Isaac Gym 预览版。它可以借助 GPU 的并行计算能力,将过去需要数千个 CPU 核参与训练的任务移植到单个 GPU 上完成训练。
为什么 Isaac Gym 可以如此高效?昨天,英伟达机器人研究科学家(前 OpenAI 研究科学家)Ankur Handa 在推特上公布,他们已经发布了 Isaac Gym 的技术报告,里面详细解释了 Isaac Gym 的构建细节。
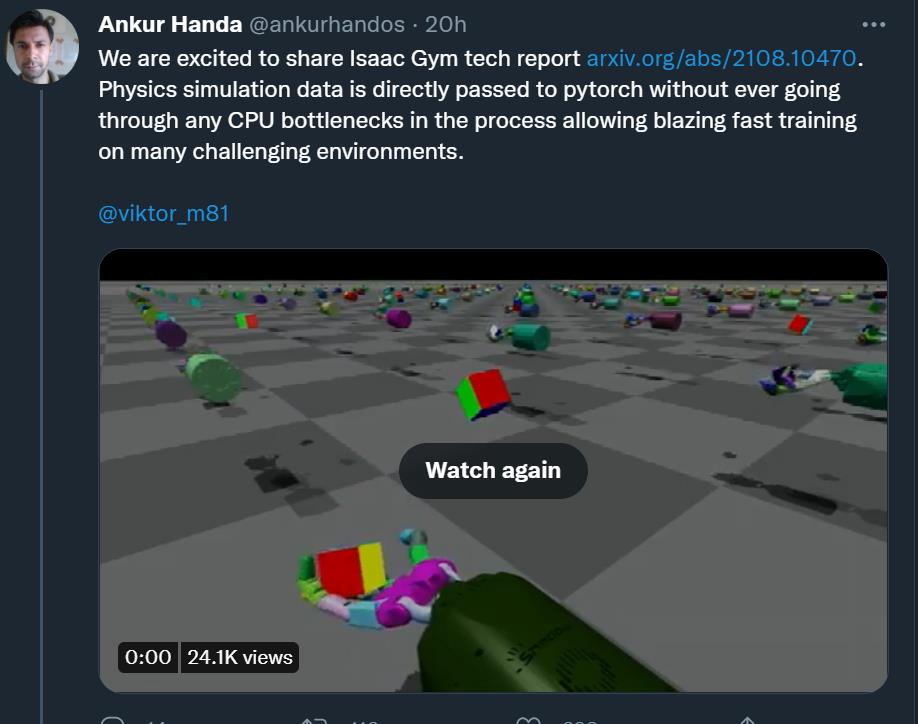
论文链接:https://arxiv.org/pdf/2108.10470.pdf
Isaac Gym 是一个端到端的高性能机器人仿真平台,它运行一个端到端的 GPU 加速训练 pipeline,使研究人员能够克服上述限制,在连续控制任务中实现 2-3 个数量级的训练加速。
具体来说,Isaac Gym 利用 NVIDIA PhysX 提供了一个 GPU 加速的模拟后端,允许它以只有使用高度并行才能达到的速度收集机器人 RL 所需的经验数据。它提供了一个基于 PyTorch 张量的 API,可以在 GPU 上本地访问物理模拟的结果。观测张量可以作为策略网络的输入,而产生的动作张量可以直接反馈到物理系统中。
借助端到端的方法,观察、奖励和动作的缓冲可以在整个学习过程中保留在 GPU 上,因此不需要从 CPU 读取数据。这种设置使得一个 GPU 上可以同时处理数以万计的环境,研究者可以轻松地在本地运行实验。
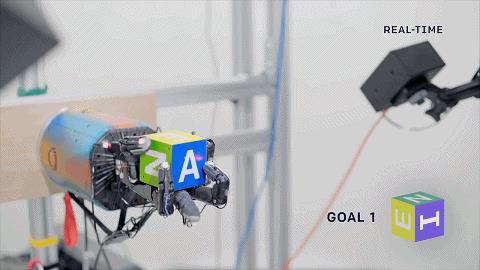
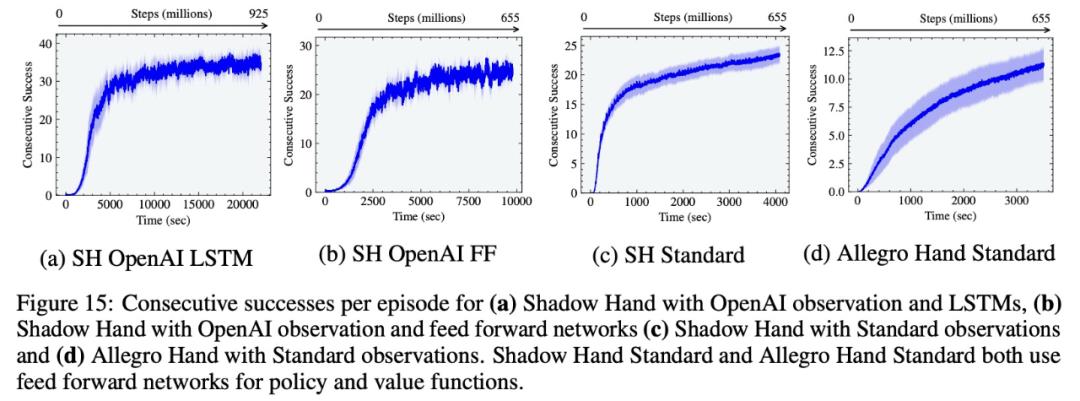
基于这一平台,研究者复现了 OpenAI 的手持立方体定位任务。实验表明,在 A100 上,Isaac Gym 可以实现与 OpenAI 相似的性能结果,即使用前馈连续成功 20 次,使用 LSTM 网络连续成功 37 次,但分别只用了 1 小时和 6 小时左右。相比之下,之前 OpenAI 的研究分别需要 30 个小时和 17 个小时。

此外,研究者还在其他多个机器人任务上进行了实验,Isaac Gym 都实现了明显的加速。
以下是报告细节节选。
端到端 GPU 强化学习
Isaac Gym 通过利用英伟达的 PhysX GPU 加速模拟引擎实现了这些结果,使其能够收集机器人 RL 所需的经验数据。除了快速物理模拟以外,Isaac Gym 还支持在 GPU 上进行观察和奖励计算,从而避免严重的性能瓶颈,特别是消除了 GPU 与 CPU 之间昂贵的数据传输。通过这种方式实施,Isaac Gym 实现了完整的端到端 GPU 强化学习 pipeline。
Isaac Gym 提供了一个简单的 API,用于创建包括机器人和物体场景,支持从常见的 URDF(Unified Robot Description Format)和 MJCF 文件格式加载数据。每个环境都可以根据需要进行多次复制,同时保留复制之间的变化能力(例如通过域随机化)。该环境可以同时并行模拟,而不需要与其他环境交互。
使用一个完全由 GPU 加速的仿真和训练 pipeline 可以帮助降低研究阻碍,使得以前只能在大型 CPU 集群完成的任务,现在仅用一个 GPU 即可解决。Isaac Gym 还包括一个基本的近似策略优化 (PPO) 实现和一个简单的 RL 任务系统,用户可以根据需要替换为其他任务系统或 RL 算法。当示例使用的是 PyTorch 时,用户也能够通过定制与 TensorFlow 训练库集成。
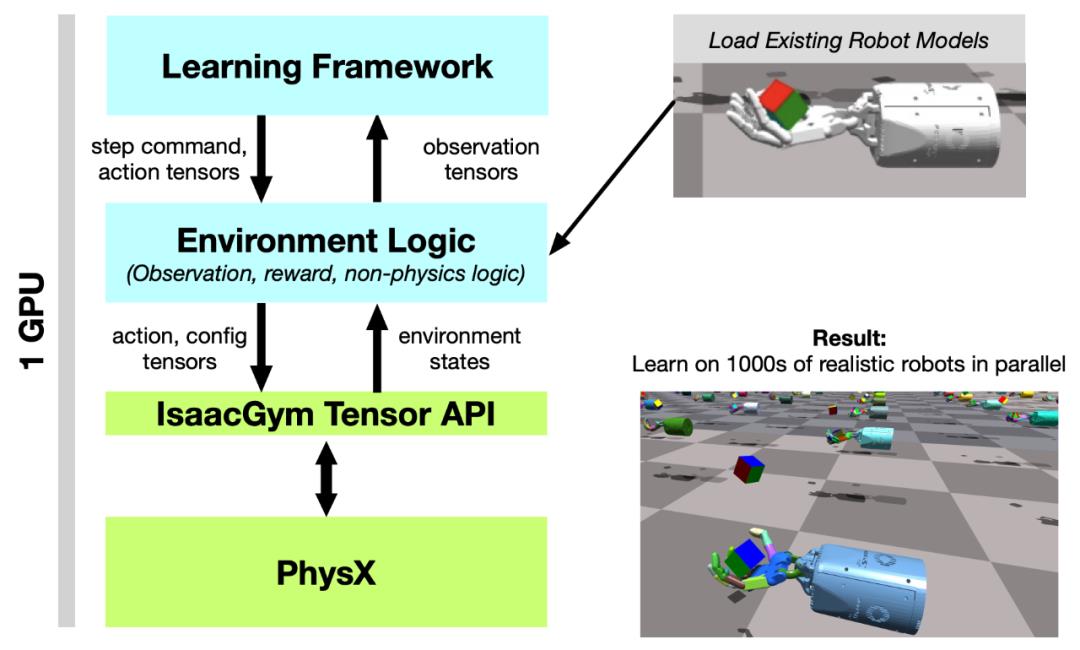
图 2:系统概述。Tensor API 提供了一个 Python 代码接口,可以直接在 GPU 上实现 PhysX 后端以及 get 和 set 模拟器状态,在整个 RL 训练 pipeline 中能实现 100 倍到 1000 倍的速度提升,同时提供高保真度的仿真,并且能够与现有机器人模型连接。
这项研究的主要贡献包括:
开发了用于机器人学习任务的高保真 GPU 加速的机器人模拟器;
Python 中的 Tensor API 将物理缓冲区封装到 PyTorch 张量中,从而提供对物理缓冲区的直接访问,而无需受到任何 CPU 限制;
实施多个高度复杂的机器人操作环境,这些环境可以在一个 GPU 上以每秒数十万 step 的速度模拟;
在充满挑战的机器人环境中,使用 Isaac Gym 和 深度强化学习进行高性能训练的结果。
实验结果
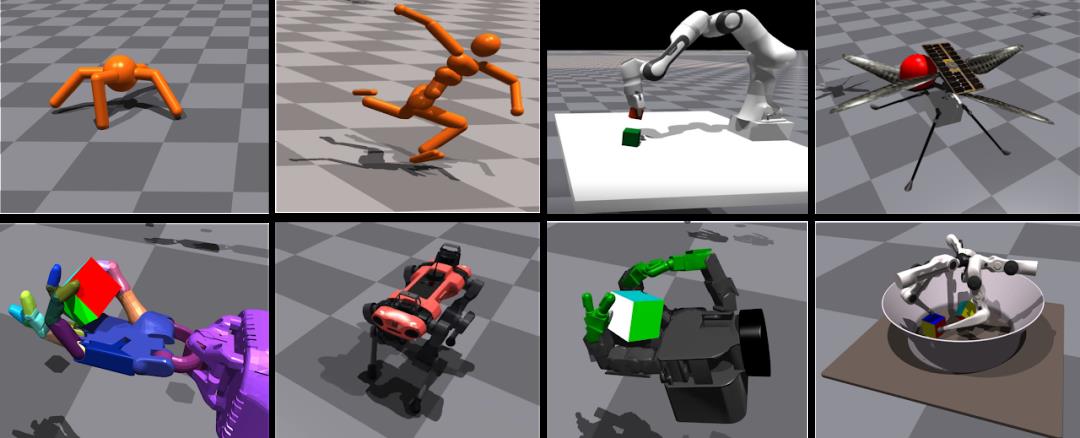
该研究在多种模拟环境中实现了显著的训练加速:在单个 NVIDIA A100 GPU 上,Ant 和 Humanoid 环境可以分别在 20 秒和 4 分钟内实现高性能运动,而 ANYmal 的训练也只需要不到 2 分钟的时间,使用 AMP 的 Humanoid 角色动画训练需要 6 分钟,使用 Shadow Hand 旋转立方体需 35 分钟。
研究者首先进行了「Ant 实验」,在这个环境中,智能体被训练在平坦的地面上运行。实验发现,随着智能体数量的增加,训练时间如预期中一样在减少。也就是说,环境数量由 256 个改变为 8192 个,增加了 5 个数量级,达到 7000 个奖励数量级的训练时间从 1000 秒 (约 16.6 分钟) 减少到了 100 秒(约 1.6 分钟)。但 Ant 在单个 GPU 上仅用 20 秒就可以达到 3000 次运动效果。
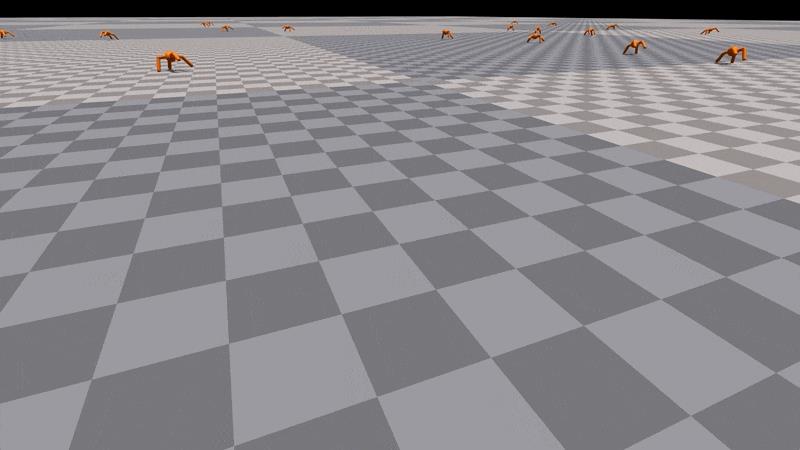
「Ant」是模拟最简单的环境之一,每秒并行环境步骤的数量可能高达 700K。当环境数量从 8192 增加到 16384 时,由于水平长度减少,研究者没能再观测到增益。
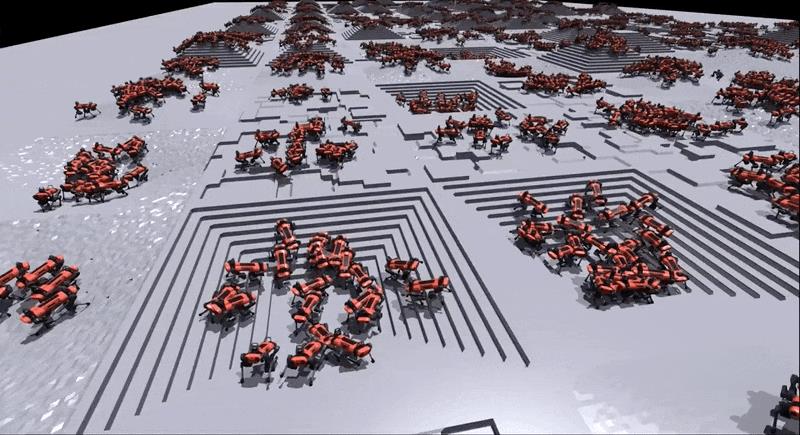
研究者还为 ANYmal 开发了一个粗糙地面的运动任务,并通过将训练好的策略转移到实体机器人上来验证了该方法的有效性。机器人学习在不平坦的地面、斜坡、楼梯和障碍物上行走,除了对平坦地形环境的观察外,它还需要接收机器人周围地形高度的测量数据。

该研究使用不对称的 actor-critic 和域随机化重现 OpenAI Shadow Hand 立方体的训练设置。实验结果表明,该研究在 A100 上,前馈连续 20 次成功和 LSTM 网络连续 37 次成功,平均分别在大约 1 小时和 6 小时内获得与当时 OpenAI 实验结果相似的性能,成功容差为 0.4 rad。相比之下,使用传统 RL 训练设置,在 CPU 集群(384 个 CPU,每个 CPU 具有 16 个内核)和 8 个 NVIDIA V100 GPU、MuJoCo 的组合上,OpenAI 的工作分别需要 30 小时和 17 小时。
值得一提的是, OpenAI 仅显示 1 个随机种子的结果,相比之下,该研究中最好的种子在短短 2.5 小时内使用 LSTM 实现了 37 次连续成功。
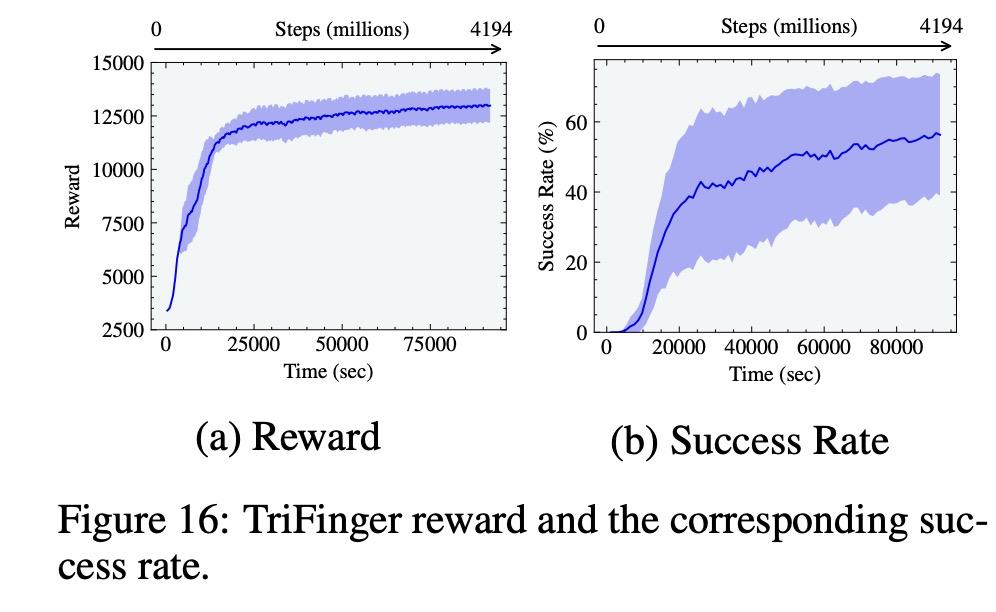
该研究还在 ANYmal 和 TriFinger 上演示了模拟到现实的传输结果,这进一步展示了该研究的模拟器执行高保真接触丰富操作任务的能力。
---------♥---------
声明:本内容来源网络,版权属于原作者
图片来源网络,不代表本公众号立场。如有侵权,联系删除
AI博士私人微信,还有少量空位


点个在看支持一下吧

以上是关于现在GPU是否有4核这个说法?-GPU Quad Mali 400 .是GPU4核的意思吧?的主要内容,如果未能解决你的问题,请参考以下文章