GMM模型是啥
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了GMM模型是啥相关的知识,希望对你有一定的参考价值。
就是用高斯概率密度函数(正态分布曲线)精确地量化事物,将一个事物分解为若干的基于高斯概率密度函数(正态分布曲线)形成的模型。GMMs已经在数值逼近、语音识别、图像分类、图像去噪、图像重构、故障诊断、视频分析、邮件过滤、密度估计、目标识别与跟踪等领域取得了良好的效果。
对图像背景建立高斯模型的原理及过程:图像灰度直方图反映的是图像中某个灰度值出现的频次,也可以认为是图像灰度概率密度的估计。如果图像所包含的目标区域和背景区域相比比较大,且背景区域和目标区域在灰度上有一定的差异,那么该图像的灰度直方图呈现双峰-谷形状。
主要步骤
1、为图像的每个像素点指定一个初始的均值、标准差以及权重。
2、收集N(一般取200以上,否则很难得到像样的结果)帧图像利用在线EM算法得到每个像素点的均值、标准差以及权重)。
3、从N+1帧开始检测,检测的方法:
对每个像素点:
1)将所有的高斯核按照 ω / σ 降序排序
2)选择满足公式的前M个高斯核:M = arg min(ω / σ > T)
3)如果当前像素点的像素值在中有一个满足:就可以认为其为背景点。
参考技术A GMM模型即高斯混合模型。GMM(Gaussian Mixture Model),高斯混合模型(或者混合高斯模型),也可以简写为MOG(Mixture of Gaussian)。
高斯模型就是用高斯概率密度函数(正态分布曲线)精确地量化事物,将一个事物分解为若干的基于高斯概率密度函数(正态分布曲线)形成的模型。
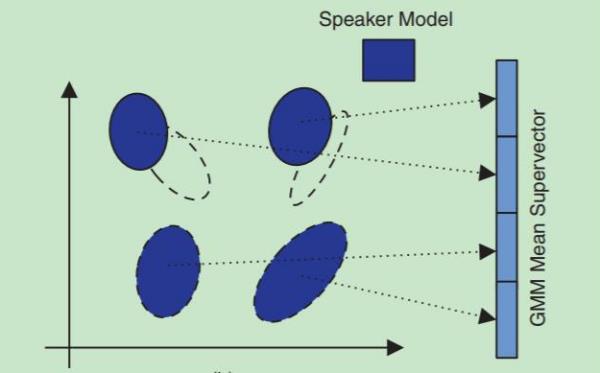
混合高斯模型使用K(基本为3到5个)个高斯模型来表征图像中各个像素点的特征,在新一帧图像获得后更新混合高斯模型, 用当前图像中的每个像素点与混合高斯模型匹配,如果成功则判定该点为背景点, 否则为前景点。 通观整个高斯模型,主要是有方差和均值两个参数决定,对均值和方差的学习,采取不同的学习机制,将直接影响到模型的稳定性、精确性和收敛性 。由于我们是对运动目标的背景提取建模,因此需要对高斯模型中方差和均值两个参数实时更新。为提高模型的学习能力,改进方法对均值和方差的更新采用不同的学习率;为提高在繁忙的场景下,大而慢的运动目标的检测效果,引入权值均值的概念,建立背景图像并实时更新,然后结合权值、权值均值和背景图像对像素点进行前景和背景的分类。 参考技术B 应用在动态面板数据的一种模型,由差分广义矩模型和系统广义矩模型。
http://wenku.baidu.com/view/1f61df61ddccda38376baf41.html 参考技术C 混合高斯模型。相当于几个高斯模型的加权和,高斯模型可以理解为正态分布模型。 参考技术D 混合高斯模型
高斯混合模型GMM的EM算法实现(聚类)
在 聚类算法K-Means, K-Medoids, GMM, Spectral clustering,Ncut一文中我们给出了GMM算法的基本模型与似然函数,在EM算法原理中对EM算法的实现与收敛性证明进行了详细说明。本文主要针对如何用EM算法在混合高斯模型下进行聚类进行代码上的分析说明。
1. GMM模型:
每个 GMM 由 K 个 Gaussian 分布组成,每个 Gaussian 称为一个“Component”,这些 Component 线性加成在一起就组成了 GMM 的概率密度函数:
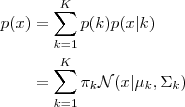
根据上面的式子,如果我们要从 GMM 的分布中随机地取一个点的话,实际上可以分为两步:首先随机地在这 K个Gaussian Component 之中选一个,每个 Component 被选中的概率实际上就是它的系数 pi(k) ,选中了 Component 之后,再单独地考虑从这个 Component 的分布中选取一个点就可以了──这里已经回到了普通的 Gaussian 分布,转化为了已知的问题。
那么如何用 GMM 来做 clustering 呢?其实很简单,现在我们有了数据,假定它们是由 GMM 生成出来的,那么我们只要根据数据推出 GMM 的概率分布来就可以了,然后 GMM 的 K 个 Component 实际上就对应了 K 个 cluster 了。根据数据来推算概率密度通常被称作 density estimation ,特别地,当我们在已知(或假定)了概率密度函数的形式,而要估计其中的参数的过程被称作“参数估计”。
2. 参数与似然函数:
现在假设我们有 N 个数据点,并假设它们服从某个分布(记作 p(x) ),现在要确定里面的一些参数的值,例如,在 GMM 中,我们就需要确定 影响因子pi(k)、各类均值pMiu(k) 和 各类协方差pSigma(k) 这些参数。 我们的想法是,找到这样一组参数,它所确定的概率分布生成这些给定的数据点的概率最大,而这个概率实际上就等于  ,我们把这个乘积称作似然函数 (Likelihood Function)。通常单个点的概率都很小,许多很小的数字相乘起来在计算机里很容易造成浮点数下溢,因此我们通常会对其取对数,把乘积变成加和
,我们把这个乘积称作似然函数 (Likelihood Function)。通常单个点的概率都很小,许多很小的数字相乘起来在计算机里很容易造成浮点数下溢,因此我们通常会对其取对数,把乘积变成加和 ") ,得到 log-likelihood function 。接下来我们只要将这个函数最大化(通常的做法是求导并令导数等于零,然后解方程),亦即找到这样一组参数值,它让似然函数取得最大值,我们就认为这是最合适的参数,这样就完成了参数估计的过程。
,得到 log-likelihood function 。接下来我们只要将这个函数最大化(通常的做法是求导并令导数等于零,然后解方程),亦即找到这样一组参数值,它让似然函数取得最大值,我们就认为这是最合适的参数,这样就完成了参数估计的过程。
下面让我们来看一看 GMM 的 log-likelihood function :
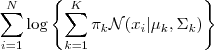
由于在对数函数里面又有加和,我们没法直接用求导解方程的办法直接求得最大值。为了解决这个问题,我们采取之前从 GMM 中随机选点的办法:分成两步,实际上也就类似于K-means 的两步。
3. 算法流程:
1. 估计数据由每个 Component 生成的概率(并不是每个 Component 被选中的概率):对于每个数据  来说,它由第
来说,它由第  个 Component 生成的概率为
个 Component 生成的概率为
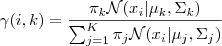
其中N(xi | μk,Σk)就是后验概率 。
。
2. 通过极大似然估计可以通过求到令参数=0得到参数pMiu,pSigma的值。具体请见这篇文章第三部分。
其中 ") ,并且
,并且  也顺理成章地可以估计为
也顺理成章地可以估计为  。
。
3. 重复迭代前面两步,直到似然函数的值收敛为止。
4. matlab实现GMM聚类代码与解释:
说明:fea为训练样本数据,gnd为样本标号。算法中的思想和上面写的一模一样,在最后的判断accuracy方面,由于聚类和分类不同,只是得到一些 cluster ,而并不知道这些 cluster 应该被打上什么标签,或者说。由于我们的目的是衡量聚类算法的 performance ,因此直接假定这一步能实现最优的对应关系,将每个 cluster 对应到一类上去。一种办法是枚举所有可能的情况并选出最优解,另外,对于这样的问题,我们还可以用 Hungarian algorithm 来求解。具体的Hungarian代码我放在了资源里,调用方法已经写在下面函数中了。
注意:资源里我放的是Kmeans的代码,大家下载的时候只要用bestMap.m等几个文件就好~
1. gmm.m,最核心的函数,进行模型与参数确定。
[cpp] view plain copy
- function varargout = gmm(X, K_or_centroids)
- % ============================================================
- % Expectation-Maximization iteration implementation of
- % Gaussian Mixture Model.
- %
- % PX = GMM(X, K_OR_CENTROIDS)
- % [PX MODEL] = GMM(X, K_OR_CENTROIDS)
- %
- % - X: N-by-D data matrix.
- % - K_OR_CENTROIDS: either K indicating the number of
- % components or a K-by-D matrix indicating the
- % choosing of the initial K centroids.
- %
- % - PX: N-by-K matrix indicating the probability of each
- % component generating each point.
- % - MODEL: a structure containing the parameters for a GMM:
- % MODEL.Miu: a K-by-D matrix.
- % MODEL.Sigma: a D-by-D-by-K matrix.
- % MODEL.Pi: a 1-by-K vector.
- % ============================================================
- % @SourceCode Author: Pluskid (http://blog.pluskid.org)
- % @Appended by : Sophia_qing (http://blog.csdn.net/abcjennifer)
- %% Generate Initial Centroids
- threshold = 1e-15;
- [N, D] = size(X);
- if isscalar(K_or_centroids) %if K_or_centroid is a 1*1 number
- K = K_or_centroids;
- Rn_index = randperm(N); %random index N samples
- centroids = X(Rn_index(1:K), :); %generate K random centroid
- else % K_or_centroid is a initial K centroid
- K = size(K_or_centroids, 1);
- centroids = K_or_centroids;
- end
- %% initial values
- [pMiu pPi pSigma] = init_params();
- Lprev = -inf; %上一次聚类的误差
- %% EM Algorithm
- while true
- %% Estimation Step
- Px = calc_prob();
- % new value for pGamma(N*k), pGamma(i,k) = Xi由第k个Gaussian生成的概率
- % 或者说xi中有pGamma(i,k)是由第k个Gaussian生成的
- pGamma = Px .* repmat(pPi, N, 1); %分子 = pi(k) * N(xi | pMiu(k), pSigma(k))
- pGamma = pGamma ./ repmat(sum(pGamma, 2), 1, K); %分母 = pi(j) * N(xi | pMiu(j), pSigma(j))对所有j求和
- %% Maximization Step - through Maximize likelihood Estimation
- Nk = sum(pGamma, 1); %Nk(1*k) = 第k个高斯生成每个样本的概率的和,所有Nk的总和为N。
- % update pMiu
- pMiu = diag(1./Nk) * pGamma' * X; %update pMiu through MLE(通过令导数 = 0得到)
- pPi = Nk/N;
- % update k个 pSigma
- for kk = 1:K
- Xshift = X-repmat(pMiu(kk, :), N, 1);
- pSigma(:, :, kk) = (Xshift' * ...
- (diag(pGamma(:, kk)) * Xshift)) / Nk(kk);
- end
- % check for convergence
- L = sum(log(Px*pPi'));
- if L-Lprev < threshold
- break;
- end
- Lprev = L;
- end
- if nargout == 1
- varargout = Px;
- else
- model = [];
- model.Miu = pMiu;
- model.Sigma = pSigma;
- model.Pi = pPi;
- varargout = Px, model;
- end
- %% Function Definition
- function [pMiu pPi pSigma] = init_params()
- pMiu = centroids; %k*D, 即k类的中心点
- pPi = zeros(1, K); %k类GMM所占权重(influence factor)
- pSigma = zeros(D, D, K); %k类GMM的协方差矩阵,每个是D*D的
- % 距离矩阵,计算N*K的矩阵(x-pMiu)^2 = x^2+pMiu^2-2*x*Miu
- distmat = repmat(sum(X.*X, 2), 1, K) + ... %x^2, N*1的矩阵replicateK列
- repmat(sum(pMiu.*pMiu, 2)', N, 1) - ...%pMiu^2,1*K的矩阵replicateN行
- 2*X*pMiu';
- [~, labels] = min(distmat, [], 2);%Return the minimum from each row
- for k=1:K
- Xk = X(labels == k, :);
- pPi(k) = size(Xk, 1)/N;
- pSigma(:, :, k) = cov(Xk);
- end
- end