CUDA入门笔记
Posted Lachiven
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了CUDA入门笔记相关的知识,希望对你有一定的参考价值。
硬件概念:
一个SM(Streaming Multiprocessor)中的所有SP(Streaming Processor)是分成Warp的,共享同一个Memory和Instruction Unit(指令单元)。
从硬件角度讲,一个GPU由多个SM组成(当然还有其他部分),一个SM包含有多个SP(以及还有寄存器资源,Shared Memory资源,L1cache,Scheduler,SPU,LD/ST单元等等)
SM采用的是SIMT (Single-Instruction, Multiple-Thread,单指令多线程)架构,基本的执行单元是线程束(warps),线程束包含32个线程.
线程数尽量为32的倍数,因为线程束(Warp)共享一个内存和指令。假如线程数是1,则Warp会生成一个掩码,当一个指令控制器对一个Warp单位的线程发送指令时,32个线程中只有一个线程在真正执行,其他31个进程会进入静默状态。
了解硬件的代码:
cu文件:
#include <iostream>
#include "cuda_runtime.h"
int main()
int dev = 0;
cudaDeviceProp devProp;
cudaGetDeviceProperties(&devProp, dev);
std::cout << "使用GPU device " << dev << ": " << devProp.name << std::endl;
std::cout << "SM的数量:" << devProp.multiProcessorCount << std::endl;
std::cout << "每个线程块的共享内存大小:" << devProp.sharedMemPerBlock / 1024.0 << " KB" << std::endl;
std::cout << "每个线程块的最大线程数:" << devProp.maxThreadsPerBlock << std::endl;
std::cout << "每个SM的最大 线程 数:" << devProp.maxThreadsPerMultiProcessor << std::endl;
std::cout << "每个SM的最大 线程束 数——Warp数:" << devProp.maxThreadsPerMultiProcessor / 32 << std::endl;
return 0;
CMakeLists:
cmake_minimum_required(VERSION 3.8)
project(CUDA_TEST)
find_package(CUDA REQUIRED)
message(STATUS "cuda version: " $CUDA_VERSION_STRING)
include_directories($CUDA_INCLUDE_DIRS)
cuda_add_executable(cuda_test src/test001.cu)
target_link_libraries(cuda_test $CUDA_LIBRARIES)软件概念
在利用cuda进行编程时,一个grid分为多个block,而一个block分为多个thread
- 每个 thread 都有自己的一份 register 和 local memory 的空间。
- 一组thread构成一个 block,这些thread 则共享有一份shared memory。
- 所有的 thread(包括不同 block 的 thread)都共享一份global memory、constant memory、和 texture memory。
- 不同的 grid 则有各自的 global memory、constant memory 和 texture memory。
- 每一个时钟周期内,warp(一个block里面一起运行的thread,其中各个线程对应的数据资源不同(指令相同但是数据不同)包含的thread数量是有限的,现在的规定是32个。一个block中含有16个warp。所以一个block中最多含有512个线程,每次Device(就是显卡)只处理一个grid。
- 一个sm只会执行一个block里的warp,当该block里warp执行完才会执行其他block里的warp。
CUDA编程CUDA入门笔记
文章目录
1. CUDA结构
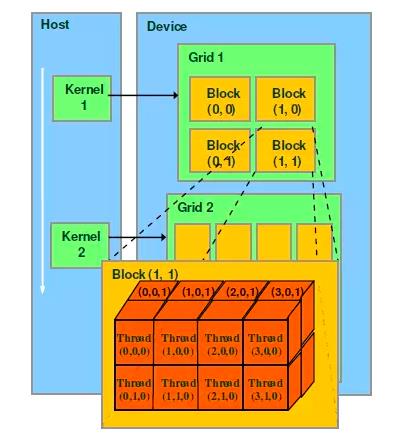
显卡内部,有三级结构:网格(grid)、块(block)、线程(thread)。每个显卡只有很少的网格,一个核函数只能运行在一个网格中,而一个网格里有多个块,每个块包含了若干线程。
kernel在device上执行时实际上是启动很多线程,一个kernel所启动的所有线程称为一个网格(grid),同一个网格上的线程共享相同的全局内存空间,grid是线程结构的第一层次,而网格又可以分为很多线程块(block),一个线程块里面包含很多线程,这是第二个层次。线程两层组织结构如下图所示,这是一个gird和block均为2-dim的线程组织。
介绍说明:
- Thread:线程,并行的基本单元
- Thread Block:线程块,互相合作的线程组。它有以下特点:
- 允许彼此同步
- 可以通过
共享内存快速交换数据- 以1维、2维或3维组织(里面的thread)
- Grid:一组线程块
- 以1维、2维和3维度组织(里面是block)
共享全局内存
- Kernel:在GPU上执行的核心程序,这个kernel函数是运行在某个Grid上的。
每一个block和每个thread都有自己的ID,我们通过相应的索引找到相应的线程和线程块。
- threadIdx,blockIdx
- Block ID: 1D or 2D
- Thread ID: 1D, 2D or 3D
2. SP、SM与warp
SP(streaming Process),SM(streaming multiprocessor)是硬件(GPU hardware)概念。而thread,block,grid,warp是软件上的(CUDA)概念。
-
SP(streaming processor):最基本的处理单元,也称为CUDA core。最后具体的指令和任务都是在SP上处理的。GPU进行并行计算,也就是很多个SP同时做处理。 -
SM(streaming multiprocessor):多个SP加上其他的一些资源组成一个streaming multiprocessor。也叫GPU大核,其他资源如:warp scheduler,register,shared memory等。SM可以看做GPU的心脏(对比CPU核心),register和shared memory是SM的稀缺资源。CUDA将这些资源分配给所有驻留在SM中的threads。因此,这些有限的资源就使每个SM中active warps有非常严格的限制,也就限制了并行能力。 -
warp(线程束):GPU执行程序时的调度单位,目前cuda的warp的大小为32,同在一个warp的线程,以不同数据资源执行相同的指令,这就是所谓 SIMT。
需要指出,每个SM包含的SP数量依据GPU架构而不同,Fermi架构GF100是32个,GF10X是48个,Kepler架构都是192个,Maxwell都是128个。
简而言之,SP是线程执行的硬件单位,SM中包含多个SP,一个GPU可以有多个SM(比如16个),最终一个GPU可能包含有上千个SP。
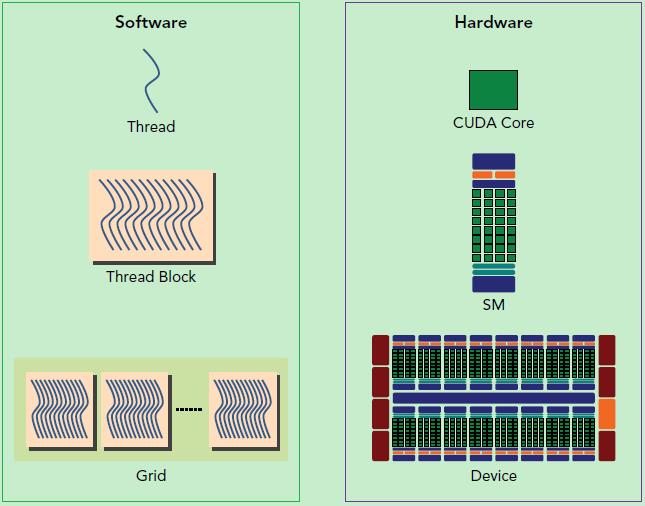
下图展示了逻辑层面和硬件层面的对应关系:

- 每个线程由每个线程处理器(SP)执行
- 线程块由多核处理器(SM)执行
- 一个kernel其实由一个grid来执行,一个kernel一次只能在一个GPU上执行
- 关于warp的解释:
- 一个SM中可以同时有多个warp,这些warp被称为active warp,不同warp处于不同状态,挂起,就绪,执行。
但是一个SM上正在被执行的就只有一个warp,这个正在被执行的warp叫做resident warp。 active warp是指已经分配给SM的warp,并且该warp需要的资源(寄存器)也已经分配。- 一个SP可以执行一个thread,但是实际上并不是所有的thread能够在同一时刻执行。
Nvidia把32个threads组成一个warp,warp是调度和运行的基本单元。warp中所有threads并行的执行相同的指令。一个warp需要占用一个SM运行,多个warps需要轮流进入SM。由SM的硬件warp scheduler负责调度。目前每个warp包含32个threads(Nvidia保留修改数量的权利)。所以,一个GPU上resident thread最多只有 SM*warp个。
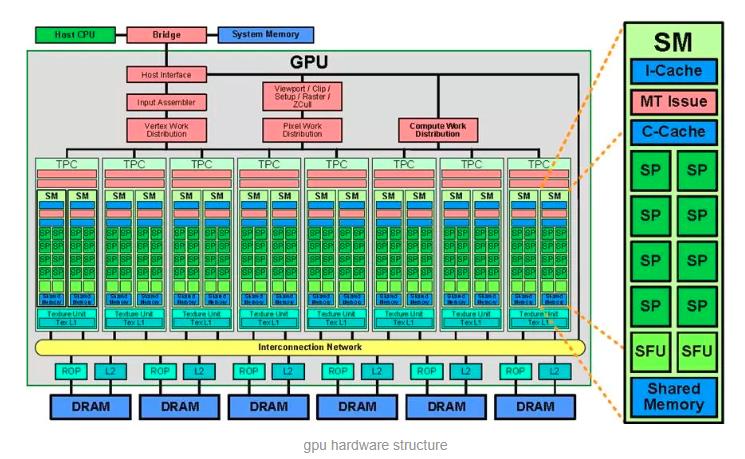
block是软件概念,一个block只会由一个sm调度,程序员在开发时,通过设定block的属性,告诉GPU硬件,我有多少个线程,线程怎么组织。而具体怎么调度由sm的warps scheduler负责,block一旦被分配好SM,该block就会一直驻留在该SM中,直到执行结束。一个SM可以同时拥有多个blocks,但需要序列执行。下图显示了GPU内部的硬件架构:
3. CUDA线程索引的方式
CUDA使用多级索引的方式访问线程。
定位Block:第一级索引是(grid.xIdx, grid.yIdy),通过它我们就能找到了这个线程块的位置。定位thread:第二级索引(block.xIdx, block.yIdx, block.zIdx)来定位到指定的线程。
grid和block都是定义为dim3类型的变量,dim3可以看成是包含三个无符号整数(x,y,z)成员的结构体变量,在定义时,缺省值初始化为1。因此grid和block可以灵活地定义为1-dim,2-dim以及3-dim结构,对于图中结构(水平方向为x轴),定义的grid和block如下所示
dim3 grid(3, 2);
dim3 block(5, 3);
kernel_fun<<< grid, block >>>(prams...);
定义图解如下:
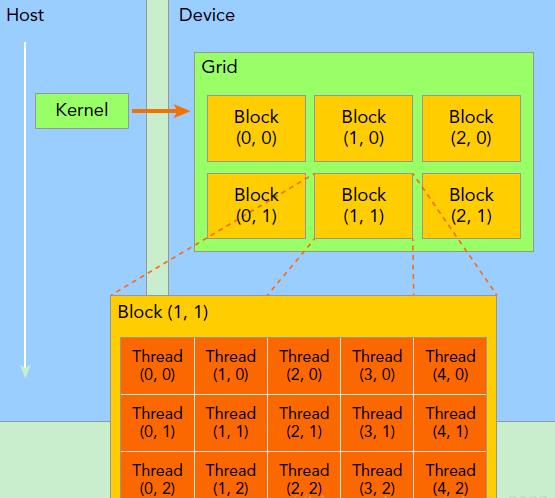
一个线程需要两个内置的坐标变量(blockIdx,threadIdx)来唯一标识,它们都是dim3类型变量,其中blockIdx指明线程所在grid中的位置,而threaIdx指明线程所在block中的位置,如图中的Thread (1,1)满足:
threadIdx.x = 1
threadIdx.y = 1
blockIdx.x = 1
blockIdx.y = 1
一个线程块上的线程是放在同一个流式多处理器(SM)上的,但是单个SM的资源有限,这导致线程块中的线程数是有限制的,现代GPUs的线程块可支持的线程数可达1024个。有时候,我们要知道一个线程在blcok中的全局ID,此时就必须还要知道block的组织结构,这是通过线程的内置变量blockDim来获得。它获取线程块各个维度的大小。对于一个2-dim的 b l o c k ( D x , D y ) block(D_x,D_y) block(Dx,Dy),线程 ( x , y ) (x,y) (x,y)的ID值为 ( x + y ∗ D x ) (x+y∗D_x) (x+y∗Dx),如果是3-dim的 b l o c k ( D x , D y , D z ) block(D_x,D_y,D_z) block(Dx,Dy,Dz),线程 ( x , y , z ) (x,y,z) (x,y,z)的ID值为 ( x + y ∗ D x + z ∗ D x ∗ D y ) (x+y∗D_x+z∗D_x∗D_y) (x+y∗Dx+z∗Dx∗Dy)。另外线程还有内置变量gridDim,用于获得网格块各个维度的大小。
一个Grid可以包含多个Blocks,Blocks的组织方式可以是一维的,二维或者三维的。block包含多个Threads,这些Threads的组织方式也可以是一维,二维或者三维的。
CUDA中每一个线程都有一个唯一的标识ID—ThreadIdx,这个ID随着Grid和Block的划分方式的不同而变化,这里给出Grid和Block不同划分方式下线程索引ID的计算公式。
1、 grid划分成1维,block划分为1维
int threadId = blockIdx.x *blockDim.x + threadIdx.x;
2、 grid划分成1维,block划分为2维
int threadId = blockIdx.x * blockDim.x * blockDim.y+ threadIdx.y * blockDim.x + threadIdx.x;
3、 grid划分成1维,block划分为3维
int threadId = blockIdx.x * blockDim.x * blockDim.y * blockDim.z
+ threadIdx.z * blockDim.y * blockDim.x
+ threadIdx.y * blockDim.x + threadIdx.x;
4、 grid划分成2维,block划分为1维
int blockId = blockIdx.y * gridDim.x + blockIdx.x;
int threadId = blockId * blockDim.x + threadIdx.x;
5、 grid划分成2维,block划分为2维
int blockId = blockIdx.x + blockIdx.y * gridDim.x;
int threadId = blockId * (blockDim.x * blockDim.y)
+ (threadIdx.y * blockDim.x) + threadIdx.x;
6、 grid划分成2维,block划分为3维
int blockId = blockIdx.x + blockIdx.y * gridDim.x;
int threadId = blockId * (blockDim.x * blockDim.y * blockDim.z)
+ (threadIdx.z * (blockDim.x * blockDim.y))
+ (threadIdx.y * blockDim.x) + threadIdx.x;
7、 grid划分成3维,block划分为1维
int blockId = blockIdx.x + blockIdx.y * gridDim.x
+ gridDim.x * gridDim.y * blockIdx.z;
int threadId = blockId * blockDim.x + threadIdx.x;
8、 grid划分成3维,block划分为2维
int blockId = blockIdx.x + blockIdx.y * gridDim.x
+ gridDim.x * gridDim.y * blockIdx.z;
int threadId = blockId * (blockDim.x * blockDim.y)
+ (threadIdx.y * blockDim.x) + threadIdx.x;
9、 grid划分成3维,block划分为3维
int blockId = blockIdx.x + blockIdx.y * gridDim.x
+ gridDim.x * gridDim.y * blockIdx.z;
int threadId = blockId * (blockDim.x * blockDim.y * blockDim.z)
+ (threadIdx.z * (blockDim.x * blockDim.y))
+ (threadIdx.y * blockDim.x) + threadIdx.x;
4 CUDA的内存
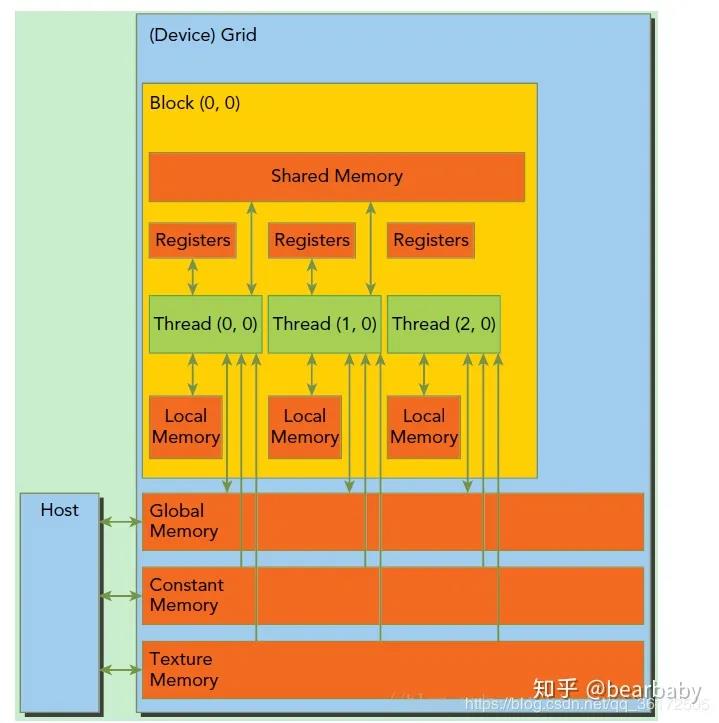
CUDA中的内存模型分为以下几个层次:
- 每个线程都用自己的
registers(寄存器)和local memory(局部内存)- 每个线程块(block)内都有自己的
shared memory(共享内存),所有线程块内的所有线程共享这段内存资源- 每个grid都有自己的
global memory(全局内存),constant memory(常量内存)和texture memory(纹理内存),不同线程块的线程都可使用。
线程访问这几类存储器的速度是:register > local memory >shared memory > global memory。
下面这幅图表示就是这些内存在计算机架构中的所在层次。


5 编程模型
在CUDA中,host和device是两个重要的概念,我们用host指代CPU及其内存,而用device指代GPU及其内存。CUDA程序中既包含host程序,又包含device程序,它们分别在CPU和GPU上运行。同时,host与device之间可以进行通信,这样它们之间可以进行数据拷贝。
典型的CUDA程序的执行流程如下:
- 分配host内存,并进行数据初始化;
- 分配device内存,并
从host将数据拷贝到device上;- 调用CUDA的核函数在device上完成指定的运算;
- 将device上的运算结果拷贝到host上;
- 释放device和host上分配的内存。
核函数用__global__符号声明,在调用时需要用<<<grid, block>>>来指定kernel要执行的线程数量,在CUDA中,每一个线程都要执行核函数,并且每个线程会分配一个唯一的线程号thread ID,这个ID值可以通过核函数的内置变量threadIdx来获得。
(1)怎么确定是在CPU还是GPU上跑?
由于GPU实际上是异构模型,所以需要区分host和device上的代码,在CUDA中是通过函数类型限定词开区别host和device上的函数,主要的三个函数类型限定词如下:
__global__:在device上执行,从host中调用(一些特定的GPU也可以从device上调用),返回类型必须是void,不支持可变参数参数,不能成为类成员函数。注意用__global__定义的kernel是异步的,这意味着host不会等待kernel执行完就执行下一步。__device__:在device上执行,仅可以从device中调用,不可以和__global__同时用。__host__:在host上执行,仅可以从host上调用,一般省略不写,不可以和__global__同时用,但可和__device__,此时函数会在device和host都编译。
通过关键字就可以表示某个程序在CPU上跑还是在GPU上跑。
| 函数 | 执行位置 | 调用位置 |
|---|---|---|
| __device__ float DeviceFunc() | device | device |
| __global void KernelFunc() | device | host |
| __host__ float HostFunc() | host | host |
(2)CPU与GPU的数据传输
首先介绍在GPU内存分配回收内存的函数接口:
- cudaMalloc(): 在设备端分配global memory
- cudaFree(): 释放存储空间
CPU的数据和GPU端数据做数据传输的函数接口是一样的,他们通过传递的函数实参(枚举类型)来表示传输方向:
cudaMemcpy(void *dst, void *src, size_t nbytes, enum cudaMemcpyKind direction);
enum cudaMemcpyKind的类型:
- cudaMemcpyHostToDevice(CPU到GPU)
- cudaMemcpyDeviceToHost(GPU到CPU)
- cudaMemcpyDeviceToDevice(GPU到GPU)
(3)怎么用代码表示线程组织模型
我们可以用dim3类来表示网格和线程块的组织方式,网格grid可以表示为一维和二维格式,线程块block可以表示为一维、二维和三维的数据格式。
dim3 DimGrid(100, 50); //5000个线程块,维度是100*50
dim3 DimBlock(4, 8, 8); //每个线层块内包含256个线程,线程块内的维度是4*8*8
参考:
https://blog.csdn.net/xiaohu2022/article/details/79599947
以上是关于CUDA入门笔记的主要内容,如果未能解决你的问题,请参考以下文章
BBuf的CUDA笔记一,解析OneFlow Element-Wise 算子实现
BBuf的CUDA笔记一,解析OneFlow Element-Wise 算子实现