stm32左转延时
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了stm32左转延时相关的知识,希望对你有一定的参考价值。
参考技术A 在与传感器或者模块的总线进行通信的时候,常常需要使用到精确延时,一般我们会封装几个常用延时函数。SysTick是一个24位的倒计数定时器,当计到0时,将从RELOAD寄存器中自动重装载定时初值并继续计数,且同时触发中断。只要不把它在SysTick控制及状态寄存器中的使能位清除,就永不停息。
在刚进入delay_us函数的时候,先计算好这段延时需要等待的SysTick计数次数,这里为50*9(假设系统时钟为72MHz,因为systick的频率为系统时钟频率的1/8,那么systick每增加1,就是1/9us),然后我们就一直读取SysTick->CTRL寄存器,当该寄存器bit16的值为1时,说明倒计时了50*9个SysTick,即说明延时50us时间到了。
STM32 CubeMX如何生成微秒(us)级延时
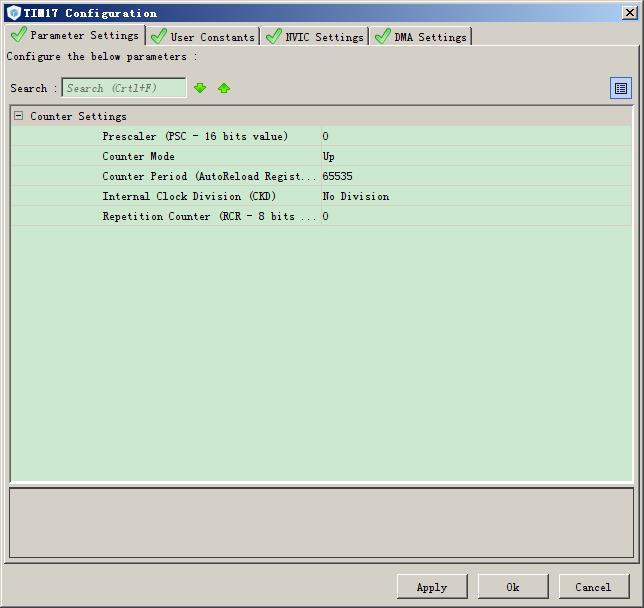
会自动在tim.c里面生成代码,如下:
/* Includes ------------------------------------------------------------------*/
#include "tim.h"
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
TIM_HandleTypeDef htim17;
/* TIM17 init function */
void MX_TIM17_Init(void)
{
htim17.Instance = TIM17;
htim17.Init.Prescaler = 0;
htim17.Init.CounterMode = TIM_COUNTERMODE_UP;
htim17.Init.Period = 65535;
htim17.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim17.Init.RepetitionCounter = 0;
if (HAL_TIM_Base_Init(&htim17) != HAL_OK)
{
Error_Handler();
}
}
void HAL_TIM_Base_MspInit(TIM_HandleTypeDef* tim_baseHandle)
{
if(tim_baseHandle->Instance==TIM17)
{
/* USER CODE BEGIN TIM17_MspInit 0 */
/* USER CODE END TIM17_MspInit 0 */
/* Peripheral clock enable */
__HAL_RCC_TIM17_CLK_ENABLE();
/* USER CODE BEGIN TIM17_MspInit 1 */
/* USER CODE END TIM17_MspInit 1 */
}
}
void HAL_TIM_Base_MspDeInit(TIM_HandleTypeDef* tim_baseHandle)
{
if(tim_baseHandle->Instance==TIM17)
{
/* USER CODE BEGIN TIM17_MspDeInit 0 */
/* USER CODE END TIM17_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_TIM17_CLK_DISABLE();
}
/* USER CODE BEGIN TIM17_MspDeInit 1 */
/* USER CODE END TIM17_MspDeInit 1 */
}
然后自己再写一个函数;
/* USER CODE BEGIN 4 */
void Delay_us(uint16_t nus)
{
__HAL_TIM_SetCounter(&htim17, 0);//htim17
__HAL_TIM_ENABLE(&htim17);
while(__HAL_TIM_GetCounter(&htim17) < (36 * nus));//36是系统时钟,更改这里就行了。
/* Disable the Peripheral */
__HAL_TIM_DISABLE(&htim17);
}
/* USER CODE END 4 */
因为36 * 1/36M 对应的就是1us,用定时器来做延时是很准的。
以上是关于stm32左转延时的主要内容,如果未能解决你的问题,请参考以下文章