2023-05-02 量学基础 换挡买点
Posted 冰冻的寒风
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了2023-05-02 量学基础 换挡买点相关的知识,希望对你有一定的参考价值。
1. 放量上攻,缩量下跌,回踩有底,阳盖阴买入
1. 放量上攻,缩量下跌,回踩有底,阳盖阴买入
案例2:李16期 答疑课2020年5月2号 40分钟

摄影测量学(第三版)_王佩军_考试复习资料
以下内容为本人本科期间整理的《摄影测量学》考试复习资料。摄影测量学这门课,在测绘工程专业算是比较难的一门课,当时上课听得是一头雾水,好在课下观看 武汉大学袁修孝教授的视频课程,加上考试前集中复习,最后考试成绩 9 3 ′ 93' 93′,没有很好但也不算太差。
由于最近需要用到摄影测量的知识,因此将当年的复习资料再次掏出来,一来帮助自己回忆,二来也希望能帮助到需要帮助的小伙伴。水平有限,若存在纰漏之处,恳请读者雅正。
第一章 绪论
1、摄影测量学的定义(P1)
传统的摄影测量学是利用光学摄影机摄取像片,通过像片来研究和确定被摄物体的形状,大小,位置和相互关系的一门科学技术,通俗的讲,摄影测量学是信息的获取及对信息加工处理的一门科学。
2、摄影测量学的主要任务(P1)
测制各种比例尺的地形图,建立地形数据库,为地理信息系统各种工程应用提供基础测绘数据。
3、摄影测量学的主要特点
(1)不需接触被摄物体本身,很少受自然和地理条件的限制
(2)由二维影像重建三维目标
(3)面采集数据方式
(4)可获得所研究物体大量的几何信息和物理信息
4、摄影测量的分类(P1)
(1)根据摄影机平台位置的不同,可分为航天摄影测量,航空摄影测量,地面摄影测量和水下摄影测量。
(2)按摄影机平台与被摄目标距离的远近可分为:航天摄影测量,航空摄影测量,地面摄影测量,近景摄影测量和显微摄影测量。
(3)按用途可分为:地形摄影测量和非地形摄影测量
5、摄影测量学发展的三个阶段(P1)
- 模拟摄影测量
- 解析摄影测量
- 数字摄影测量
6、4D产品的主要内容(P5)
- 数字高程模型 DEM
- 数字正射影像图DOM
- 数字线化图 DLG
- 数字栅格图 DRG
第二章 影像获取
1、框标(P9)
在固定不变的承片框上,四个边的中点个安置一个标志,该标志称为框标。
2、框标的分类
- 光学框标
- 机械框标
3、物方空间、像方空间(P9)
物体所处的空间称为物方空间,构象所处的空间称为像方空间
4、焦距、物镜中心(P10)
节点至焦点的距离称为焦距,用F表示。因为两节点的距离很小,通常把两个节点看做一点,称为物镜中心
s
s
s。
5、摄影机主距(P10)
航空摄影机物镜中心至底片面的距离是固定值,称为摄影机的主距,也叫像距。
6、视场、像场、视场角、像角(P10)
光线通过物镜后,焦面上照度不均匀的光亮圆称为镜头的视场。摄影时,影像相当清晰的一部分视场内的光亮圆称为像场。由物镜后节点向视场边缘射出的光线所张开的角称为视场角。由镜头后节点向像场边缘射出的光线所张开的角称为像角。
7、景深
物方能够清晰成像的一段物距。
第三章 摄影测量基础知识
1、摄影比例尺(P30)
摄影比例尺又称为像片比例尺,其严格的定义为:航摄像片上一线段为
l
l
l 的影像与地面上相应线段的水平距离
L
L
L 之比,即
1
m
=
l
L
\\cfrac{1}{m}=\\cfrac{l}{L}
m1=Ll
2、摄影航高(P30)
摄影机的物镜中心至平均高程面的距离称为摄影航高,一般用
H
H
H 表示,摄影比例尺表示为
1
m
=
f
H
\\cfrac{1}{m}=\\cfrac{f}{H}
m1=Hf,
f
f
f 为摄影机主距。
3、绝对航高、相对航高(P30)
摄影瞬间摄影机物镜中心相对于平均海水面的航高称为绝对航高,相对于其他某一基准面或某一点的高度均为相对航高。
★ 由于航空摄影时航摄像片不能严格保持水平,再加上地形起伏,所以航摄像片上的影像比例尺处处均不相等。我们所说的摄影比例尺是指平均的比例尺。摄影比例尺越大,分辨率越高。
★ 飞机在飞行中很难精确确定航高,但是差异一般不得大于5%。同一航线内,各摄影站的高差不得大于50米。
4、摄站点、摄影基线(31)
摄影机曝光时刻,物镜所在的空间位置称为摄站点,航线方向相邻两摄站点间的空间距离称为摄影基线,通常用B表示。
5、像片重叠 —— 航向重叠、旁向重叠(P31-32)
在同一条航线上,相邻两像片应有一定范围的影像重叠,称为航向重叠。相邻航线也应有足够的重叠称为旁向重叠。航向重叠一般要求为60%到65%,最小不得小于53%,旁向重叠要求为30%到40%,最小不得小于15%。
6、像片倾角(P32)
在摄影瞬间摄影机轴发生了倾斜,摄影机轴与铅直方向的夹角
α
α
α 称为像片的倾角。当
α
=
0
α=0
α=0 时,为垂直射影,是最理想的情形,但飞机受气流的影响,航摄机不可能完全置平,一般要求倾角不大于
2
°
2°
2° 最大不超过
3
°
3°
3°。
7、航线弯曲(P32)
受技术和自然条件限制,飞机往往不能按预定航线飞行,而产生航线弯曲。一般要求航摄最大偏距
△
L
△L
△L 与全航线长
L
L
L 之比不大于
3
3%
3
8、像片旋角(P33)
相邻像片的主点连线与像幅沿航线方向两框标连线间的夹角称为像片旋角,以
κ
\\kappa
κ 表示。一般要求
κ
\\kappa
κ 角不超过6°最大不超过8°。
9、正射投影、中心投影、投影中心、透视图(P34)
若投影光线相互平行且垂直于投影面,则称为正射投影。若投影光线汇聚于一点则称为中心投影。投影光线汇聚的点S称为投影中心。由中心投影得到的图称为透视图。
★航摄像片是所摄地面的中心投影。地形图在局部范围内是正摄投影。
★摄影测量可以被认为是研究并实现将中心投影的航摄像片转化为正射投影地图的科学与技术。
10、正片位、负片位(P34)
- 正片位:投影中心位于物和像的同侧。
- 负片位:投影中心位于物和像之间。
11、中心投影的主要特征
| 类别 | 一般情况 | 特例 |
|---|---|---|
| 点 | 点 | 不成像 |
| 线段 | 线段 | 点;射线;不成像 |
| 相交线段 | 相交线段 | 平行射线;一条线段;不成像 |
| 平面曲线 | 平面曲线 | 线段;变形非常大的平面曲线;不成像 |
| 空间曲线 | 平面曲线 | ---- |
| 空间一组不与承影面平行的平行直线 | 一组射线 | ---- |
12、合点
空间一组不与承影面平行的直线无穷远点处的中心投影.
13、透视变换和透视中心
- 透视变换:两个平面之间的中心投影变换。
- 在透视变换的情况下,投影中心成为透视中心。
14、航摄像片上特殊的点线面(P36)
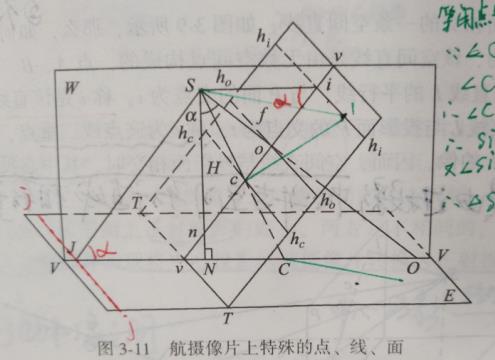
| 特殊点(9个) | 像主点 o o o、地主点 O O O、像底点 n n n、地底点 N N N、像等角点 c c c 、地等角点 C C C、主合点 i i i、主遁点 J J J、主迹点 v v v |
|---|---|
| 特殊线(9条) | 透视轴(迹线)TT 、等比线hchc、主横线 h o h o h_oh_o hoho、合线(真水平线) h i h i h_ih_i hihi、 遁线 j j jj jj、主光轴 S O SO SO 、主垂线 S N SN SN、基本方向线 V V VV VV 、主纵线 v v vv vv |
| 特殊面(5个) | 主垂面 W W W、 真水平面(合面) E s Es Es 、 遁面 R R R、像平面、物平面 |
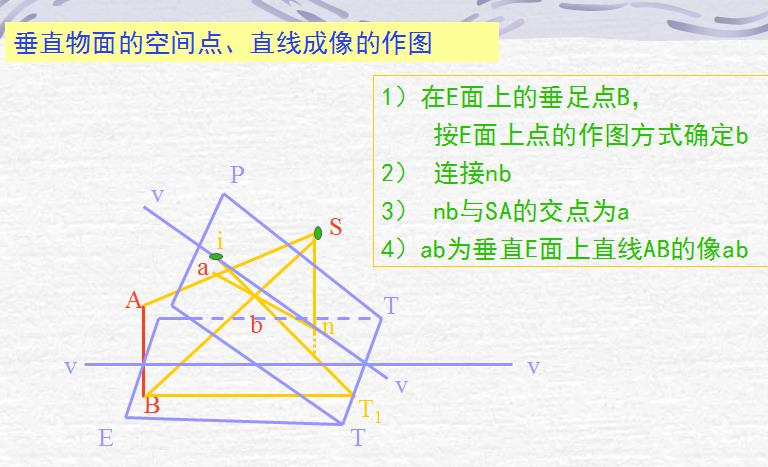
15、像底点特性
铅垂面在像平面上的构像位于以像底点n为辐射中心的相应辐射线上。
16、等角点特性
在倾斜像片和水平地面上,由像等角点c和地等角点C所引出的一对透视对应线无方向偏差,保持着方向角相等。
17、等比线特性
等比线的构像比例尺等于水平像片上的摄影比例尺,不受像片倾斜影响。等比线是水平像片平面与倾斜相片平面之交线。
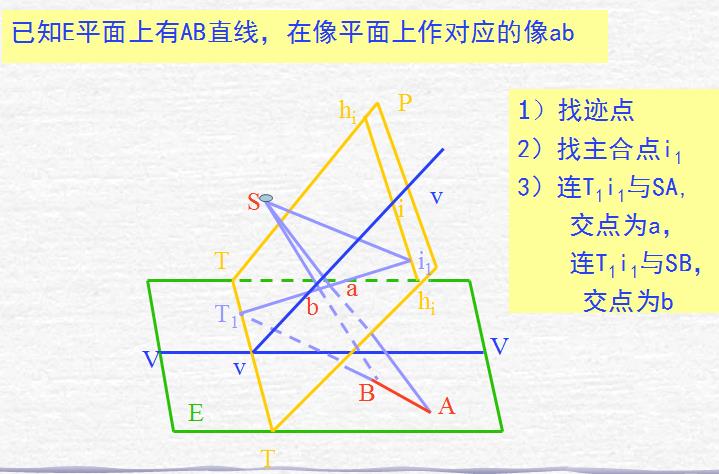
18、由物点求像点(找合点、迹点)
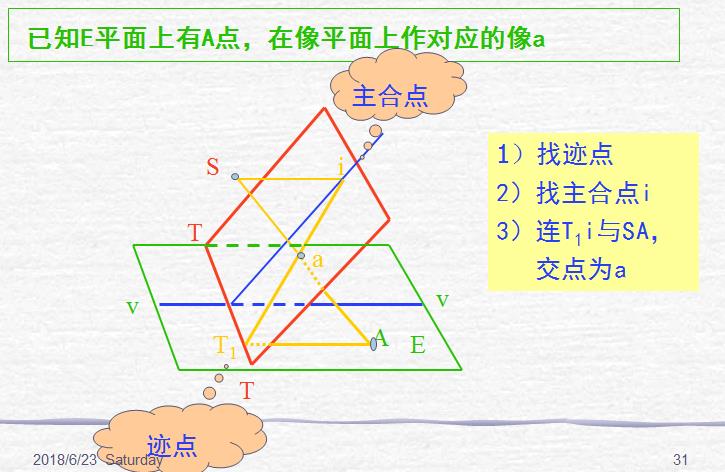
- 已知 E E E 平面上有 A A A 点,在像平面上求对应的像点 a a a
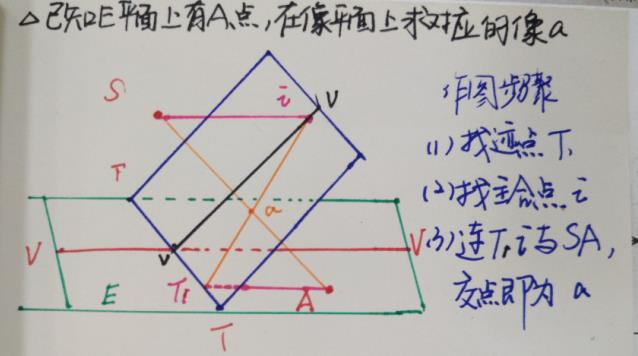
-
已知 E E E 平面上有 A B AB AB 线段,在像平面上求对应的像点 a , b a,b a,b

19、摄影测量常用的坐标系统(P37-40)
- 像方坐标系:像平面坐标系(大多数为框标坐标系)、像空间坐标系、像空间辅助坐标系。
- 物方坐标系:地面测量坐标系(左手系)、地面摄影测量坐标系。
20、航摄像片的内、外方位元素(P40)
- 方位元素:描述航空摄影瞬间摄影中心与像片在地面设定的空间坐标系(常选用地面摄影测量坐标系)中的位置与姿态的参数,称为像片的方位元素。
- 内方位元素:表示摄影中心与像片之间相关位置的参数称为内方位元素。
- 外方位元素:表示摄影中心和像片在地面坐标系中的位置和姿态的参数,称为外方位元素。(另一种描述:确定摄影光束在摄影瞬间的空间位置和姿态的参数,称为外方位元素。)
21、内方位元素的三个参数(P40)
(
x
o
,
y
o
,
f
)
(x_o,y_o,f)
(xo,yo,f),即摄影中心
S
S
S 到像片的垂距(主距)
f
f
f 及像主点
o
o
o 在框标坐标系中的坐标
x
o
,
y
o
x_o,y_o
xo,yo
22、内方位元素的作用
- 像片的内定向
- 确定摄影光束的形状
- 像点的框标坐标系向像空间坐标系的转换
★内方位元素一般视为已知!
23、外方位元素的六个参数(P41-42)
- 三个直线元素
X
s
、
Y
s
、
Z
s
X_s、Y_s、Z_s
Xs、Ys、Zs
反映摄影瞬间摄影中心 S S S 在选定的地面空间坐标系中的坐标值,通常选用地面摄影测量坐标系。则 S S S 在该坐标系的坐标为 ( X s , Y s , Z s ) (X_s,Y_s,Z_s) (Xs,Ys,Zs) - 三个角元素:
φ
、
ω
、
κ
φ、ω、κ
φ、ω、κ
若选取的像空间辅助坐标系三轴与地面摄影测量坐标系三轴分别平行。则将光轴 S o So So投影在 S − u v S-uv S−uv平面内,得到投影 S o x Sox Sox,此时 S w 、 S u 、 S o x Sw、Su、Sox Sw、Su、Sox均在一个平面内。 S o x Sox Sox与 w w w轴的夹角用 φ φ φ表示,称为航向倾角。 S o x Sox Sox与 S o So So的夹角用 ω ω ω表示,称为旁向倾角。一旦 φ 、 ω φ、ω φ、ω确定,光轴 S o So So的方向就可以确定。再将 S v Sv Sv轴投影在像平面内,其投影与像平面坐标系 y y y轴的夹角用 κ κ κ表示,称为像片旋角。若 κ κ κ已知,那么像片 P P P的空间方位亦可确定。按上述方法定义的角元素 φ 、 ω 、 κ φ、ω、κ φ、ω、κ为该像片的外方位角元素。
★ 绕飞机机翼旋转→航向倾角
φ
φ
φ
★ 绕飞机主纵线旋转→旁向倾角
ω
ω
ω
★ 绕主光线旋转→像片旋角
κ
κ
κ
★
φ
、
ω
、
κ
φ、ω、κ
φ、ω、κ 都是是小角度
24、共线条件方程
- 用地面点坐标表示像点坐标的共线条件方程:
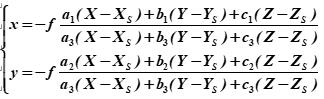
x
,
y
x,y
x,y 是以像主点为原点的像平面坐标系中的像点坐标
X
,
Y
,
Z
X,Y,Z
X,Y,Z 是相应地面点在摄影测量坐标系中的坐标
X
s
,
Y
s
,
Z
s
Xs,Ys,Zs
Xs,Ys,