Air724UG开发板串口教程
Posted zko0
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Air724UG开发板串口教程相关的知识,希望对你有一定的参考价值。
1、前言
这块板子是毕业设计老师替选的,出自合宙。使用Lua5.1,包含部分外部lib包。
缺点:
-
官方宣传的Luat合宙全系列通用,在Air724ug上是无法使用的
-
该开发板使用Lua5.1,缺少了较多常用的Api,需要外部lib补充,往往也很难查询
-
开发板型号多种多样,官方教程使用开发板往往和你的不同。如果你没有Pcb及电路经验,不推荐使用,因为你很有可能不知道怎么使用
-
使用人少,出现问题较难搜索查询
优点:
- 使用Lua作为语言(虽然是5.1)
- 合宙包含LuaTask框架,非常易用
- 官方的工具很好用,调试方便
- 官方提供demo
2、内容
①开发板版本
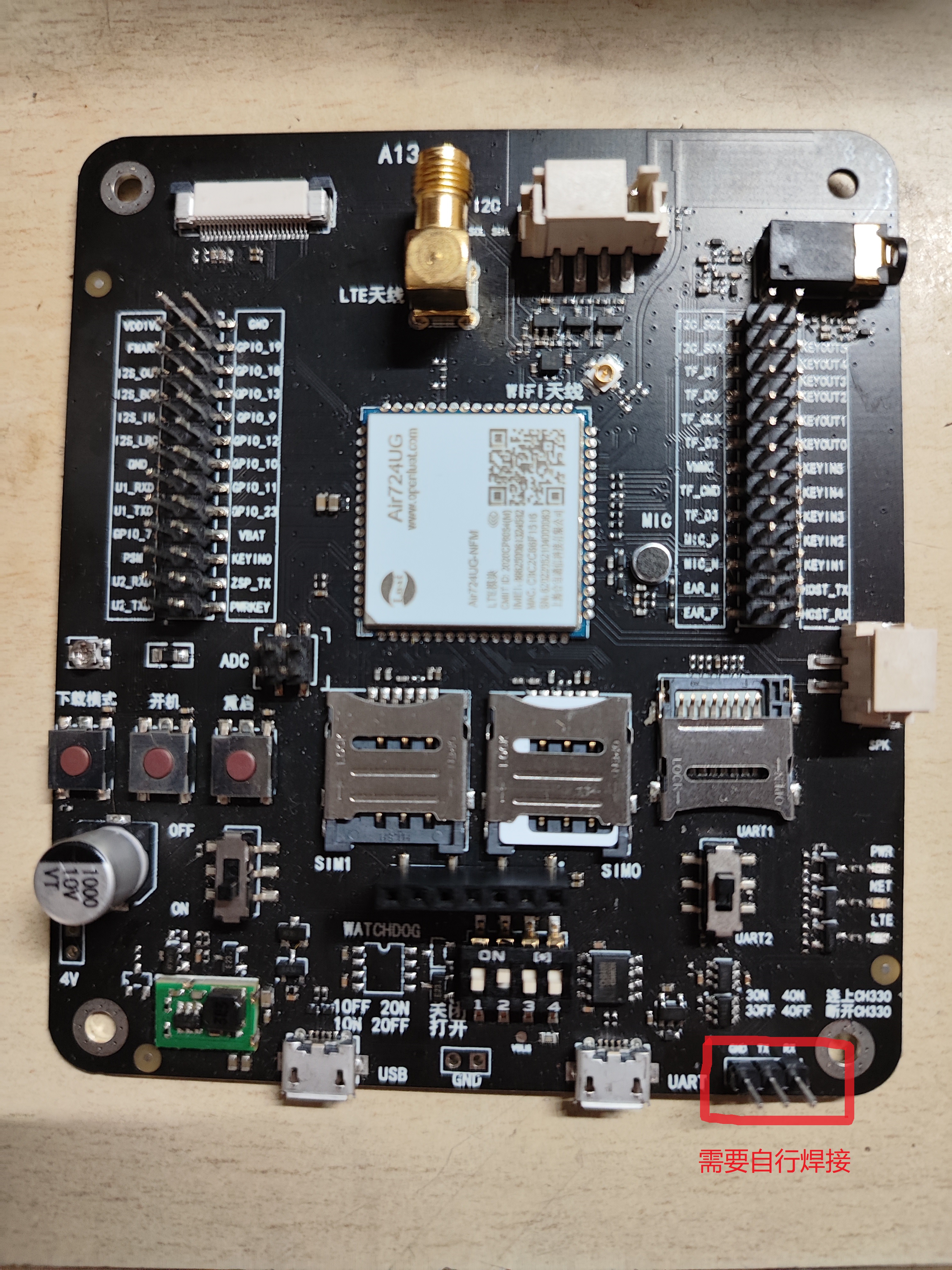
本文使用Air724UG A13开发板,如下图
②电路查看
该开发板存在两个可使用的uart,分别为uart1,uart2。
在Air724UG的芯片中,使用uart需要给一个参考电平,而在开发板中,默认给uart电平为1.8v。
如果你的通讯串口不符合该电平有两种做法:
- 使用开发板提供的串口电平转换电路(该开发板只有一个)
- 外搭串口电平转换电路
针对于1,我们看一下电路图:
首先uart1,2串口电平1.8v连接串口选择开关:
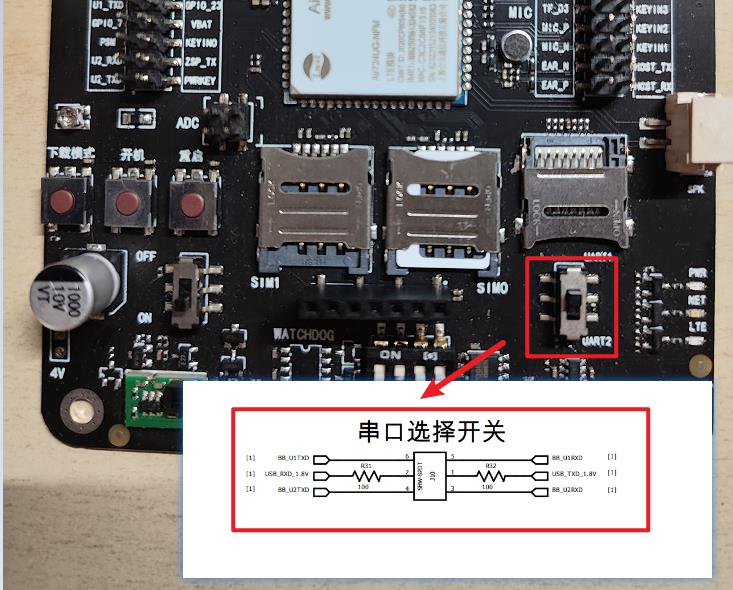
下面继续往下看,下图从右向左看:
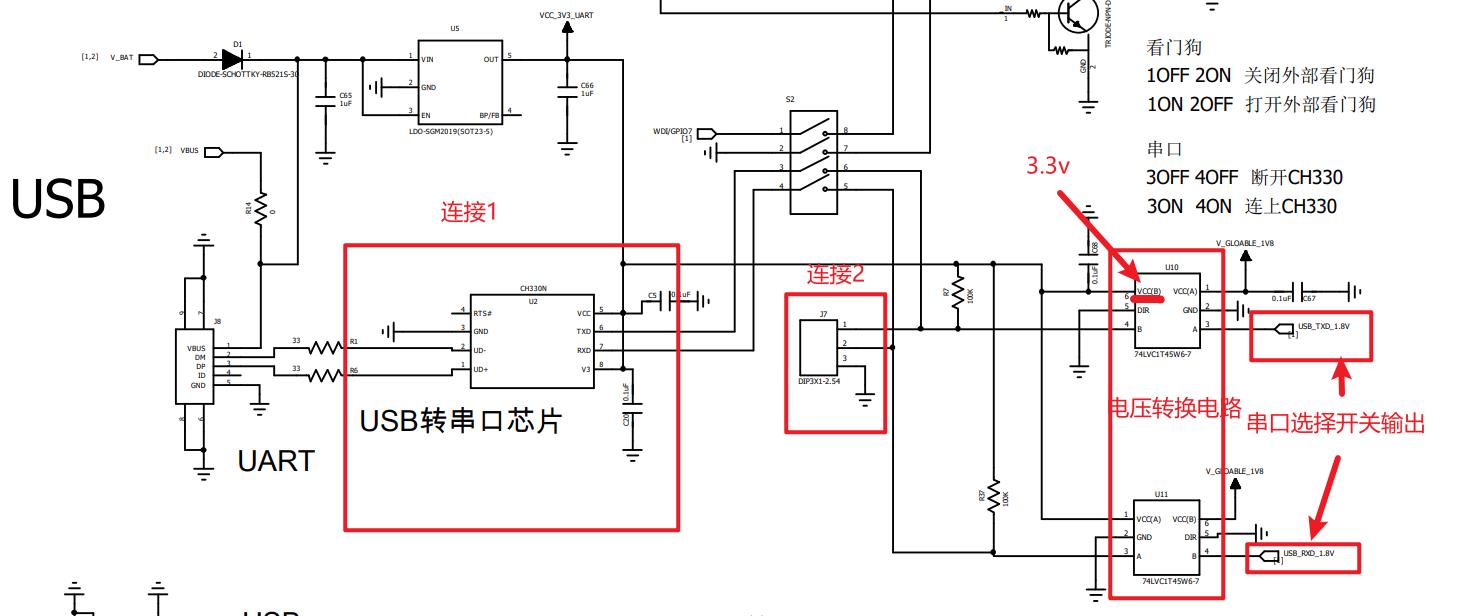
首先串口选择的uart,输出进入电压转换电路,电压转化电路的vcc连接3.3v,故该电路实现3.3v与1.8v转换。
转换电路左侧,连接有两个方向。连接1为:ch330,连接2为:DIP3X1-2.54(即为我们自行焊接的三个排针)
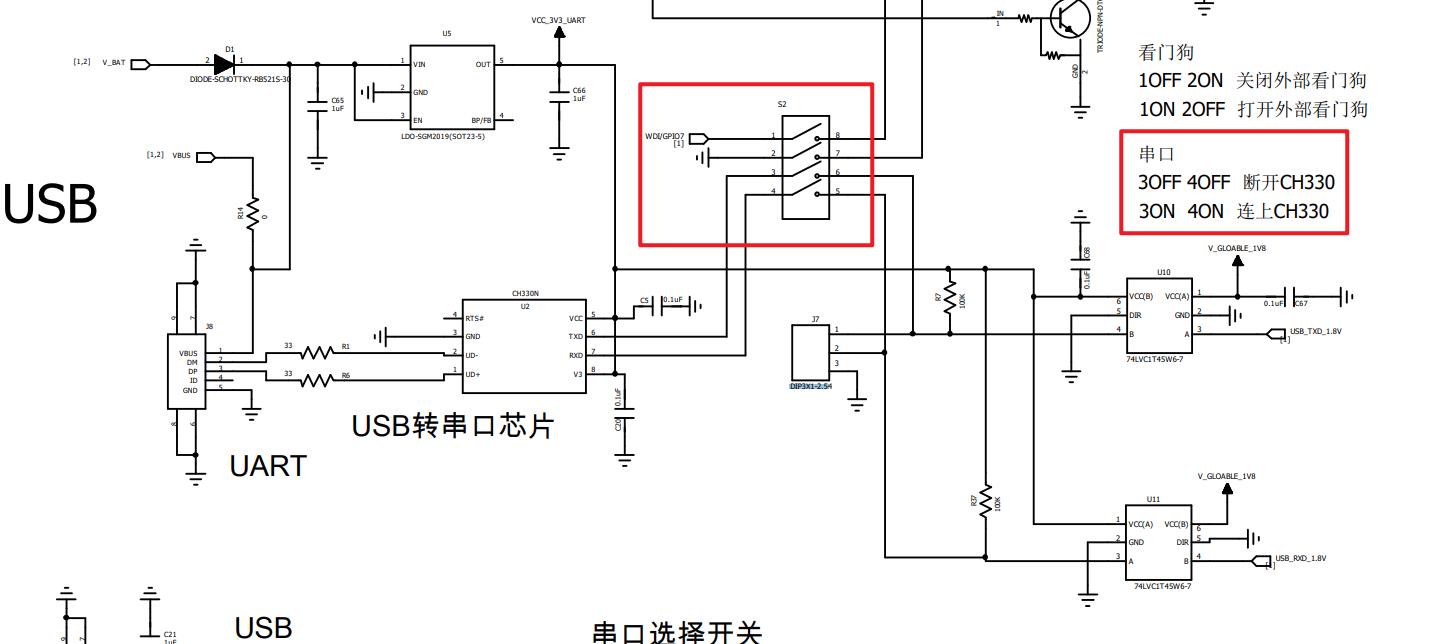
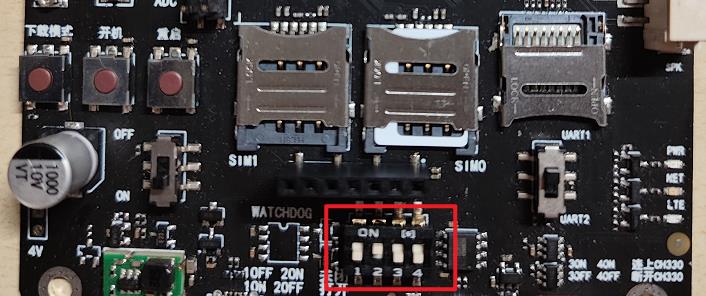
这两个连接,通过开关进行选择:
当3,4ON,则CH330打开,micro usb通路(可以进行电脑的调试通信)
当3,4OFF,则CH330关闭,micro usb断路
DIP3X1-2.54是默认连接的,使用时连接,不使用时自己断开杜邦线,如果进行通讯建议关闭CH330,以免产生影响。
③Demo
3,4ON,使用micro usb连接电脑测试
或者使用外部的3.3v串口进行通讯,连接自行焊接的排针:GND,TX,RX
myuart.lua:
module(..., package.seeall)
require "utils"
require "pm"
-- 串口的序号,本次测试程序用的是第一个串口,ID数值为1
local UART_ID = 1
-- 串口定时处理数据,每100毫秒处理一次数据。一旦收到的新的数据立刻发送回去
local function taskRead()
local dataBuffer = ""
local frameCnt = 0
while true do
-- 设置读取到结束符或者阻塞时发送数据
local receiveData = uart.read(UART_ID, "*l")
-- 如果没有收到数据
if receiveData == "" then
if not sys.waitUntil("UART_RECEIVE", 100) then
-- 判断现在的数据是否为空
-- 数据不为空
if dataBuffer:len() > 0 then
write(dataBuffer)
dataBuffer = ""
end
end
else
dataBuffer = dataBuffer .. receiveData
end
end
end
function write(data)
uart.write(UART_ID, data .. "\\r\\n")
end
-- 保持文件处于唤醒状态
pm.wake("myuart")
-- 注册接收数据
uart.on(UART_ID, "receive", function()
sys.publish("UART_RECEIVE")
end)
-- 串口配置
uart.setup(UART_ID, 115200, 8, uart.PAR_NONE, uart.STOP_1)
-- 启动串口接收数据任务
sys.taskInit(taskRead)
main.lua:
PROJECT="UART"
--版本号
VERSION="1.0.0"
--载入系统文件
require"sys"
--载入串口实现文件
require"myuart"
--启动系统框架
sys.init(0, 0)
sys.run()
在 S5PV210 的 开发板上 使用 串口 收发信息
参考学习教程:周立功嵌入式Linux开发教程-(上册)
材料:首先 准备一个 安装好 Linux 的 开发板
使用 xshell 工具 连接 开发板 ,winscp 工具 连接 开发板 , 准备 一个 Ubuntu 32位 ,装上 交叉编译链。。
使用下面 代码 和 Makefile 文件 进行编译 ,生成的 执行 文件 利用 winscp 软件复制到 Linux开发板上 ,利用 xshell 运行 这个可执行文件。
下面 代码的 功能 是 打开 串口 ,进行 等待接收 串口的 数据 ,接收完毕 后 利用 printf 打印出来 ,然后给串口返回一个 hello ,这个 是 在 led的 基础上更改的 。。。2017年6月29日10:31:03
#include <stdint.h> #include <unistd.h> #include <stdio.h> #include <stdlib.h> #include <getopt.h> #include <fcntl.h> #include <sys/ioctl.h> #include <linux/types.h> #include <string.h> //socket 头文件 2017年6月28日09:40:47,所长 #include <netinet/in.h> #include <sys/socket.h> #include <arpa/inet.h> #include <errno.h> #include <stdbool.h> #define LED_PATH "/sys/devices/platform/x210-led" #define UART0_PATH "/dev/ttyS0" #define OPEN_LED "1" #define OFF_LED "0" #define LED1 1 #define LED2 2 #define LED3 3 #define LED4 4 #define ledOperationTypeOPEN 1 #define ledOperationTypeOFF 0 #define SERVER_IP "192.168.10.11" #define SERVER_PORT ((uint16_t)7007) int led(int ledNumber,int ledOperationType) { char path[40],data[2]; int fd, ret, flag; strcpy(path, LED_PATH); if ( ledNumber == 1 ) strcat(path, "/led1"); else if( ledNumber == 2 ) strcat(path, "/led2"); else if( ledNumber == 3 ) strcat(path, "/led3"); else if( ledNumber == 4 ) strcat(path, "/led4"); else return -1; printf("打开路径%s文件",path); fd = open(path, O_RDWR);//打开/sys/devices/platform/x210-led路径下的 led ledNumber 文件 if( fd < 0 ) //判断是否打开失败 { perror("open"); return -2; } else { printf("led%d 文件打开成功.\r\n",ledNumber); } if( ledOperationType == 1) ret = write(fd, OPEN_LED, strlen(OPEN_LED) );//文件写入内容: OPEN_LED else if( ledOperationType == 0) ret = write(fd, OFF_LED, strlen(OFF_LED) ); //文件写入内容: OFF_LED else return -3; if( ret < 0 ) { perror("write"); return -4; } else { flag =1; printf("led%d 文件写入ledOperationType(1:打开LED 0:关闭LED): %d 数据成功.\r\n",ledNumber,ledOperationType); } /* for(;;) { //闪烁 LED1 if( flag == 1 ) {//如果LED灯 是打开的状态 就关闭LED灯 flag = 0; ret = write(fd, OFF_LED, strlen(OFF_LED) );//文件写入内容: OFF_LED } else {//如果LED灯 是关闭的状态 就打开LED灯 flag = 1; ret = write(fd, OPEN_LED, strlen(OPEN_LED) );//文件写入内容:OPEN_LED } sleep(1); } */ printf("关闭文件,退出进程!\r\n"); close(fd);//文件写入完毕后 要进行关闭文件 return 0; } int main(int argc, char *argv[]) { int flag =0 ; int fd; int len, i,ret; char buf[64] = "hello GXP!"; char responseMessage[64] = "hello GXP!\r\n"; fd = open(UART0_PATH, O_RDWR | O_NOCTTY); if(fd < 0) { perror(UART0_PATH); printf("打开串口0 失败!\r\n"); return -1; } else { printf("打开串口0 成功!\r\n"); } for(;;) { (void)memset(buf, 0, sizeof(buf)); len = read(fd, buf, sizeof(buf)); if (len < 0) { printf("read error \n"); return -1; } printf("%s", buf); len = write(fd, responseMessage, strlen(responseMessage)); if (len < 0) { printf("write data error \n"); } } /* for(;;) { //闪烁 LED1 if( flag == 1 ) {//如果LED灯 是打开的状态 就关闭LED灯 flag = 0; led( LED1 ,ledOperationTypeOFF ); } else {//如果LED灯 是关闭的状态 就打开LED灯 flag = 1; led( LED1 ,ledOperationTypeOPEN ); } sleep(1); } */ return(0); }
注意 下面 是 Makefile 文件 : 其中 arm-gcc-linux 在 安装交叉 编译器 的时候被我 重定义了 应该是 :arm-none-linux-gnueabi-gcc
CFLAGS += -Wall obj := uart src := uart.c CC := arm-linux-gcc $(obj): $(src) $(CC) $(CFLAGS) $^ -o [email protected] -g .PHONY: clean clean: -rm $(obj)
以上是关于Air724UG开发板串口教程的主要内容,如果未能解决你的问题,请参考以下文章