认识Arduino
Posted jiecode
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了认识Arduino相关的知识,希望对你有一定的参考价值。
认识Arduino UNO
Arduino 是开源的,板子的数据,PCB原理图都可以上官网查看。
Arduino UNO R3
数字信号与模拟信号
数字信号
数字信号是以0、1表示的电平不连续变化的信号,也就是以二进制的形式表示的信号。 在Arduino中数字信号通过高低电平来表示,高电平则为数字信号1,低电平则为数字信号0 。
Arduino上每一个带有数字编号的引脚,都是数字引脚,包括写有“A”编号的模拟输入引脚。使用这些引脚,可以完成输入输出数字信号的功能。
在使用输入或输出功能前,你需要先通过pinMode() 函数配置引脚的模式为输入模式或输出模式。
pinMode(pin, mode);
参数pin为指定配置的引脚编号;参数mode为指定的配置模式。
可使用的三种模式:
INPUT 输入模式
OUTPUT 输出模式
INPUT_PULLUP 输入上拉模式
数字引脚 既可以输入数字信号 也可以输出数字信号
//数字信号输出
digitalWrite(pin, value);
//参数pin为指定输出的引脚编号;参数value为你要指定输出的电平,使用HIGH指定输出高电平,或是使用LOW指定输出低电平。
//数字信号输入
int value = digitalRead(pin);
//参数pin为指定读取状态的引脚编号;返回值value为获取到的信号状态,1为高电平,0为低电平。
//Arduino UNO会将大于3V的输入电压视为高电平识别,小于1.5V的电压视为低电平识别。所以,即使输入电压不太准确,Arduino UNO也可以正常识别。需要注意的是,超过5V的输入电压可能会损坏Arduino UNO。(不同型号的Arduino有所不同)
在Arduino核心库中,OUTPUT被定义等于1,INPUT被定义等于0,HIGH被定义等于1,LOW被定义等于0。
所以OUTPUT,INPUT,HIGH,LOW都是可以用1或0代替的。
模拟信号
模拟信号是指用连续变化的物理量表示的信息,其信号的幅度,或频率,或相位随时间作连续变化,或在一段连续的时间间隔内,其代表信息的特征量可以在任意瞬间呈现为任意数值的信号。
生活中,接触到的大多数信号都是模拟信号,如声音、温度的变化等。模拟信号是用连续变化的物理量表示的信息,信号随时间作连续变化。在Arduino UNO上,可以接受0~5V的模拟信号。
模拟信号输出
Arduino 中使用analogWrite() 函数实现模拟信号输出功能。但该函数并不是输出真正意义上的模拟值,而是以一种特殊的方式来达到输出近似模拟值的效果,这种方式叫做脉冲宽度调制(PWM,Pulse Width Modulation)。
在Arduino UNO中,提供PWM功能的引脚为3、5、6、9、10、11。
脉宽调制(PWM)是一种使用数字手段获得模拟结果的技术。数字控制用于产生方波,即在开和关之间切换的信号。这种开关模式可以通过改变信号花费的时间与信号关闭的时间,来模拟电路板全Vcc(5V)和关断(0V)之间的电压。"导通时间"的持续时间称为脉冲宽度。要获得不同的模拟值,请更改或调制该脉冲宽度。例如,如果使用 LED 以足够快的速度重复此开关模式,则结果就好像信号是介于 0 和 Vcc 之间的稳定电压,用于控制 LED 的亮度。
//模拟信号输出
analogWrite(pin,value);
//参数pin是指定要输出PWM波的引脚,参数value指定是PWM的脉冲宽度,范围为0~255。 0表示0V 255表示5V
//在analogWrite() 和analogRead() 函数内部,已经完成了引脚的初始化,因此不用在Setup() 函数中进行初始化操作。
模拟信号输入
模拟输入引脚是带有ADC(Analog-to-Digital Converter,模数转换器)功能的引脚。它可以将外部输入的模拟信号转换为芯片运算时可以识别的数字信号,从而实现读入模拟值的功能。
Arduino 模拟输入功能有10位精度,即可以将0~5V的电压信号转换为0~1023的整数形式表示。
//模拟信号输入
int value = analogRead(pin);
//参数pin是指定要读取模拟值的引脚,被指定的引脚必须是模拟输入引脚。如analogRead(A0)即是读取A0引脚上的模拟值。
Arduino框架下ESP32使用固件自带的SD库的总结
Arduino框架下ESP32使用固件自带的SD库的总结
- 代码调试还是使用
VSCode PIO方便一些。可以很方便的去查看相关函数的上一层封装。
跟随SD库附带的ReadMe文件认识一下卡的类型

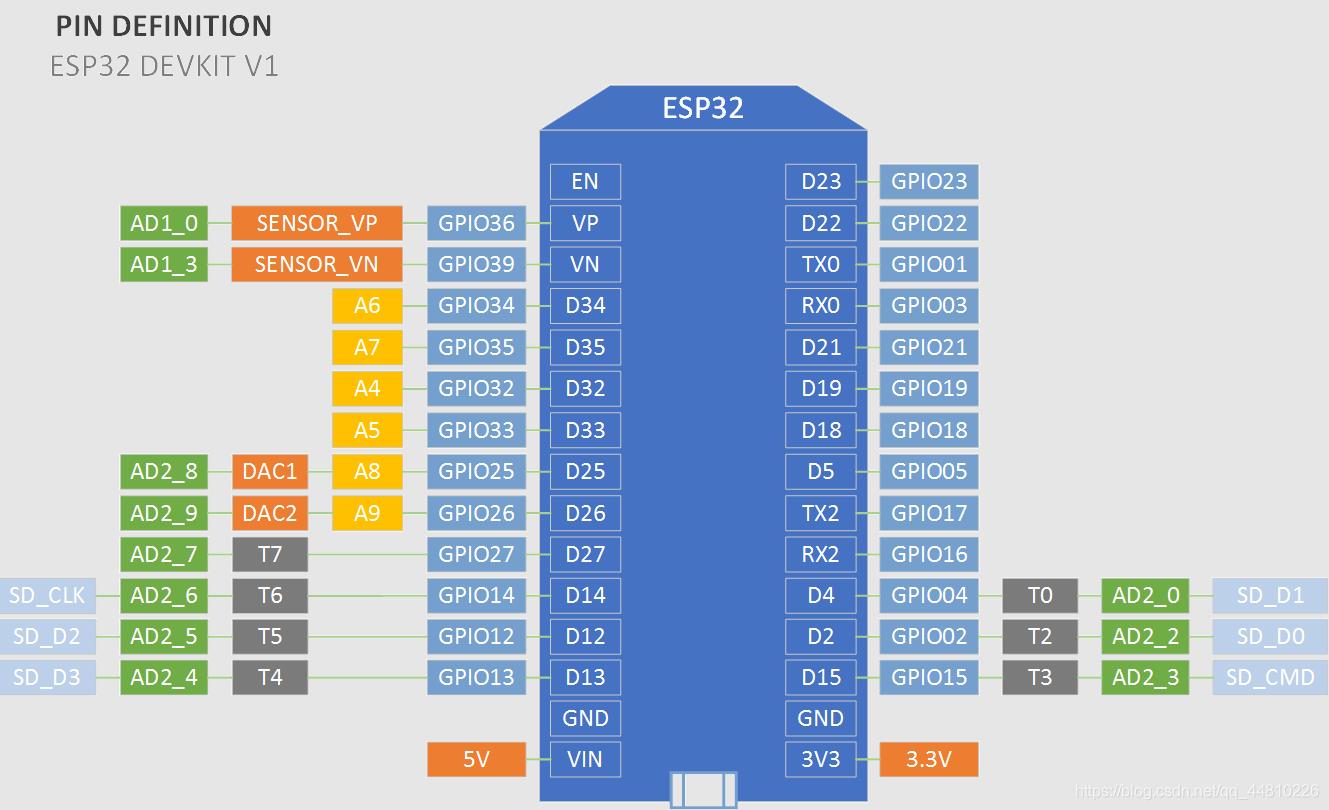
- SD卡与ESP32接线图(VSPI接线)

- 默认使用的是VSPI总线
| SPI | MOSI | MISO | CLK | CS |
|---|---|---|---|---|
| VSPI | 23 | 19 | 18 | 5 |
- SPI通讯
1.GND-for the ground pins.
2.VCC-for the supply voltage.
3.MISO-for the SPI Master Input Slave Output pin.
4.MOSI-for the SPI Master Output Slave Input pin.
5.SCK-for the SPI Serial Clock pin.
6.CS-for the SPI Chip Select pin.
- gnd -用于接地插脚。
- vcc- 电源电压。
- miso-用于SPI主输入从输出引脚。
- mosi -用于SPI主输出从输入引脚。
- sck -用于SPI串行时钟引脚。
- cs -用于SPI芯片选择引脚。
- esp32 Devkeit
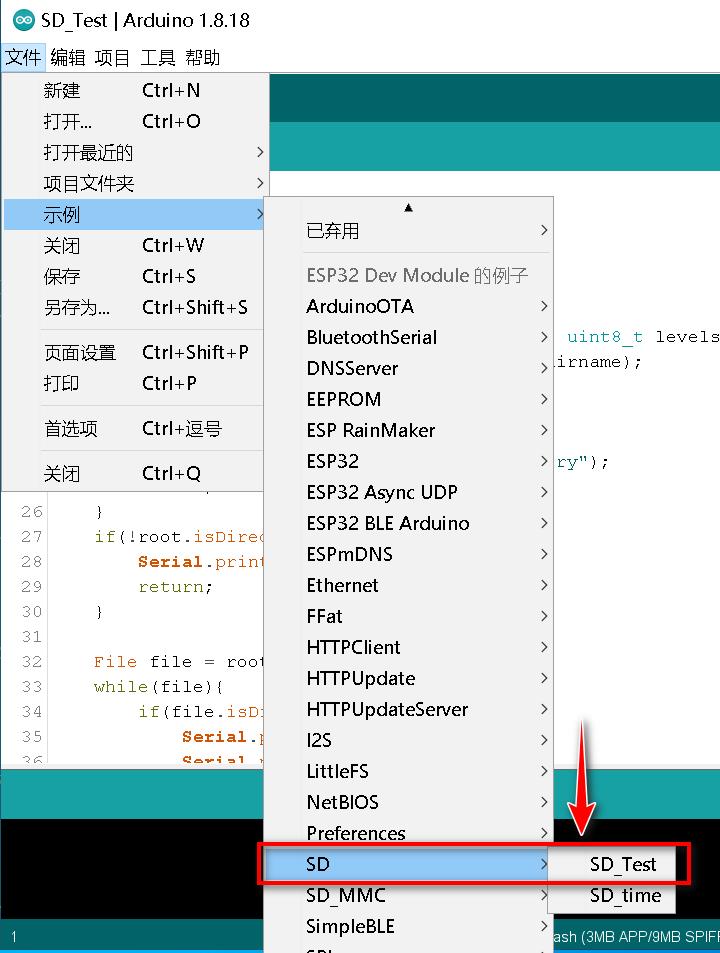
Arduino IDE中SD卡示例位置
-
本实验所使用的模块
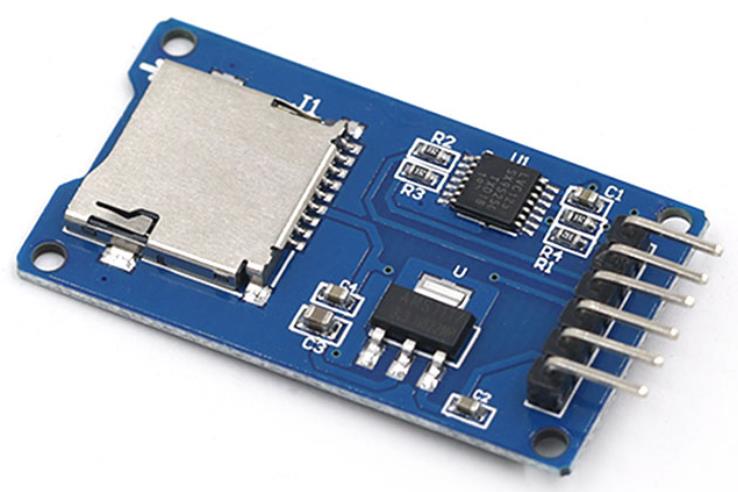
-
实例代码
/*
* Connect the SD card to the following pins:
*
* SD Card | ESP32
* D2 -
* D3 SS
* CMD MOSI
* VSS GND
* VDD 3.3V
* CLK SCK
* VSS GND
* D0 MISO
* D1 -
*/
#include "FS.h"
#include "SD.h"
#include "SPI.h"
void listDir(fs::FS &fs, const char * dirname, uint8_t levels)
Serial.printf("Listing directory: %s\\n", dirname);
File root = fs.open(dirname);
if(!root)
Serial.println("Failed to open directory");
return;
if(!root.isDirectory())
Serial.println("Not a directory");
return;
File file = root.openNextFile();
while(file)
if(file.isDirectory())
Serial.print(" DIR : ");
Serial.println(file.name());
if(levels)
listDir(fs, file.path(), levels -1);
else
Serial.print(" FILE: ");
Serial.print(file.name());
Serial.print(" SIZE: ");
Serial.println(file.size());
file = root.openNextFile();
void createDir(fs::FS &fs, const char * path)
Serial.printf("Creating Dir: %s\\n", path);
if(fs.mkdir(path))
Serial.println("Dir created");
else
Serial.println("mkdir failed");
void removeDir(fs::FS &fs, const char * path)
Serial.printf("Removing Dir: %s\\n", path);
if(fs.rmdir(path))
Serial.println("Dir removed");
else
Serial.println("rmdir failed");
void readFile(fs::FS &fs, const char * path)
Serial.printf("Reading file: %s\\n", path);
File file = fs.open(path);
if(!file)
Serial.println("Failed to open file for reading");
return;
Serial.print("Read from file: ");
while(file.available())
Serial.write(file.read());
file.close();
void writeFile(fs::FS &fs, const char * path, const char * message)
Serial.printf("Writing file: %s\\n", path);
File file = fs.open(path, FILE_WRITE);
if(!file)
Serial.println("Failed to open file for writing");
return;
if(file.print(message))
Serial.println("File written");
else
Serial.println("Write failed");
file.close();
void appendFile(fs::FS &fs, const char * path, const char * message)
Serial.printf("Appending to file: %s\\n", path);
File file = fs.open(path, FILE_APPEND);
if(!file)
Serial.println("Failed to open file for appending");
return;
if(file.print(message))
Serial.println("Message appended");
else
Serial.println("Append failed");
file.close();
void renameFile(fs::FS &fs, const char * path1, const char * path2)
Serial.printf("Renaming file %s to %s\\n", path1, path2);
if (fs.rename(path1, path2))
Serial.println("File renamed");
else
Serial.println("Rename failed");
void deleteFile(fs::FS &fs, const char * path)
Serial.printf("Deleting file: %s\\n", path);
if(fs.remove(path))
Serial.println("File deleted");
else
Serial.println("Delete failed");
void testFileIO(fs::FS &fs, const char * path)
File file = fs.open(path);
static uint8_t buf[512];
size_t len = 0;
uint32_t start = millis();
uint32_t end = start;
if(file)
len = file.size();
size_t flen = len;
start = millis();
while(len)
size_t toRead = len;
if(toRead > 512)
toRead = 512;
file.read(buf, toRead);
len -= toRead;
end = millis() - start;
Serial.printf("%u bytes read for %u ms\\n", flen, end);
file.close();
else
Serial.println("Failed to open file for reading");
file = fs.open(path, FILE_WRITE);
if(!file)
Serial.println("Failed to open file for writing");
return;
size_t i;
start = millis();
for(i=0; i<2048; i++)
file.write(buf, 512);
end = millis() - start;
Serial.printf("%u bytes written for %u ms\\n", 2048 * 512, end);
file.close();
void setup()
Serial.begin(115200);
if(!SD.begin())
Serial.println("Card Mount Failed");
return;
uint8_t cardType = SD.cardType();
if(cardType == CARD_NONE)
Serial.println("No SD card attached");
return;
Serial.print("SD Card Type: ");
if(cardType == CARD_MMC)
Serial.println("MMC");
else if(cardType == CARD_SD)
Serial.println("SDSC");
else if(cardType == CARD_SDHC)
Serial.println("SDHC");
else
Serial.println("UNKNOWN");
uint64_t cardSize = SD.cardSize() / (1024 * 1024);
Serial.printf("SD Card Size: %lluMB\\n", cardSize);
listDir(SD, "/", 0);
createDir(SD, "/mydir");
listDir(SD, "/", 0);
removeDir(SD, "/mydir");
listDir(SD, "/", 2);
writeFile(SD, "/hello.txt", "Hello ");
appendFile(SD, "/hello.txt", "World!\\n");
readFile(SD, "/hello.txt");
deleteFile(SD, "/foo.txt");
renameFile(SD, "/hello.txt", "/foo.txt");
readFile(SD, "/foo.txt");
testFileIO(SD, "/test.txt");
Serial.printf("Total space: %lluMB\\n", SD.totalBytes() / (1024 * 1024));
Serial.printf("Used space: %lluMB\\n", SD.usedBytes() / (1024 * 1024));
void loop()
SD卡初始化
if(!SD.begin())
Serial.println("Card Mount Failed");
return;
- 自定义
CS引脚
SD.begin(CSpin)
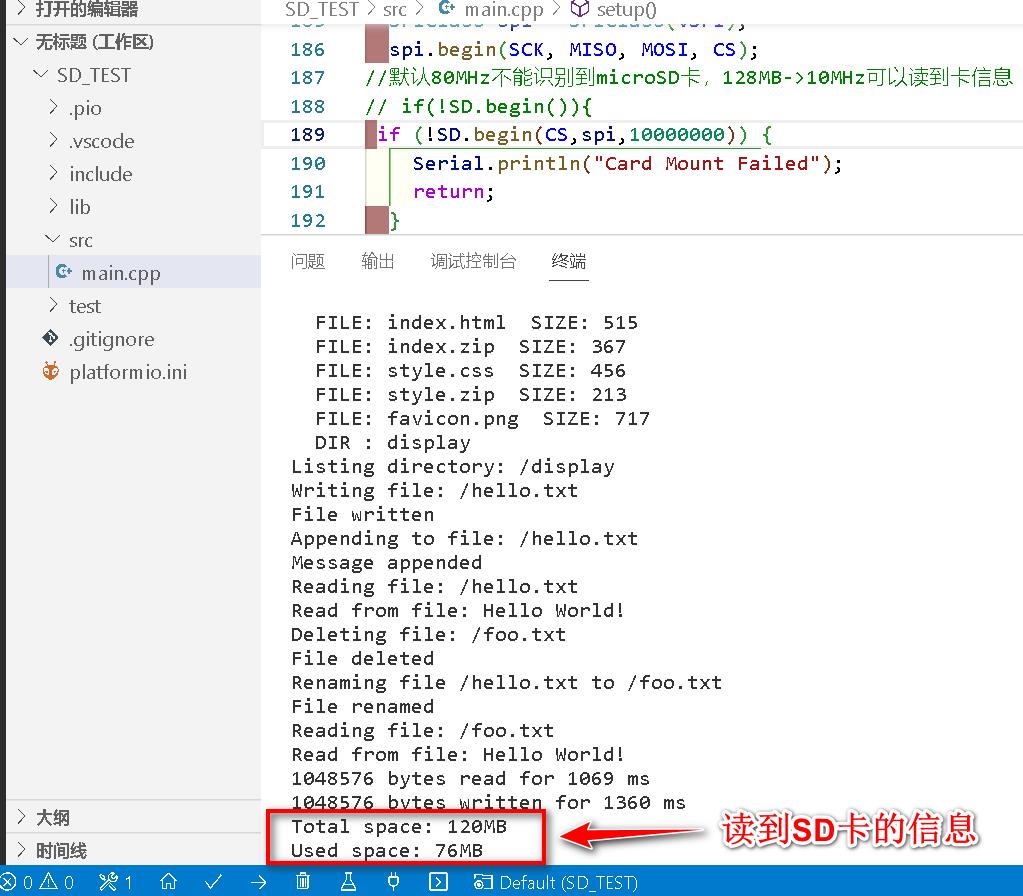
- 默认与microSD通讯时的频率为
10MHz,个人测试推荐使用默认频率比较稳定,容易识别到卡。如果设置到更高频率很大几率识别不到卡。esp32除了默认的SPI1连接的外置flash最高速度可以达到80MHz,其他的两组SPI通讯速度不能设置这么高。
自定义SPI引脚
#define SCK 17 //tx2
#define MISO 19
#define MOSI 23
#define CS 5
SPIClass spi = SPIClass(VSPI);
spi.begin(SCK, MISO, MOSI, CS);
if (!SD.begin(CS,spi,10000000))
Serial.println("Card Mount Failed");
return;
-
- 采用
128MB容量的MicroSD卡很容易就读到。
- 采用
2GB的内存卡测试

插卡注意事项
先插卡再给MicroSD卡模块供电,如果是热拔插的情况,在插上Micro SD卡后需要重新给MicroSD卡模块断电重启一下,否则无法读取到卡。这一点很重要。
- 目前发现市面上的有些
MicroSD卡存在读取不到,不能被识别的情况,我在测试手上的3张MicroSD卡时,发现一张1GB容量的卡不管怎么都读不到,不知道是卡本身的原因还是ESP32就是对这类颗粒的存储芯片不兼容,内存卡是好的,通过读卡器,电脑都是可以识别到的,能正常写入和读取的卡。- 容量范围:最大理论支持32GB,目前手上没有这个容量的卡,没法验证和测试。
以上是关于认识Arduino的主要内容,如果未能解决你的问题,请参考以下文章