OctConv:八度卷积复现
Posted 华为云开发者社区
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了OctConv:八度卷积复现相关的知识,希望对你有一定的参考价值。
摘要:不同于传统的卷积,八度卷积主要针对图像的高频信号与低频信号。
本文分享自华为云社区《OctConv:八度卷积复现》,作者:李长安 。
论文解读
八度卷积于2019年在论文《Drop an Octave: Reducing Spatial Redundancy in Convolutional Neural Networks with Octave Convol》提出,在当时引起了不小的反响。八度卷积对传统的convolution进行改进,以降低空间冗余。其中“Drop an Octave”指降低八个音阶,代表频率减半。
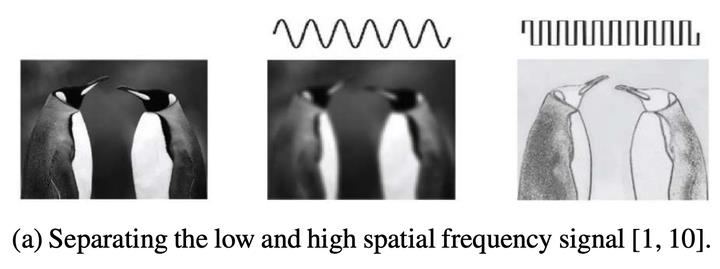
不同于传统的卷积,八度卷积主要针对图像的高频信号与低频信号。首先,我们回忆一下数字图像处理中的高频信号与低频信号的概念。图像中的低频信号和高频信号也叫做低频分量和高频分量。图像中的高频分量,指的是图像强度(亮度/灰度)变化剧烈的像素点,例如边缘(轮廓)、图像的细节处、噪声(即噪点)(该点之所以称为噪点,是因为它与周边像素点灰度值有明显差别,也就是图像强度有剧烈的变化,所以噪声是高频部分)。图像中的低频分量,指的是图像强度(亮度/灰度)变换平缓的像素点,例如大片色块的地方。例如当我们在读书的时候,我们会聚焦于书上的文字而不是书纸本身,这里的文字就是高频分量,白纸即为低频分量。
下图是论文中给出的例子,左图是原图,中图表示低频信号,右图表示高频信号。
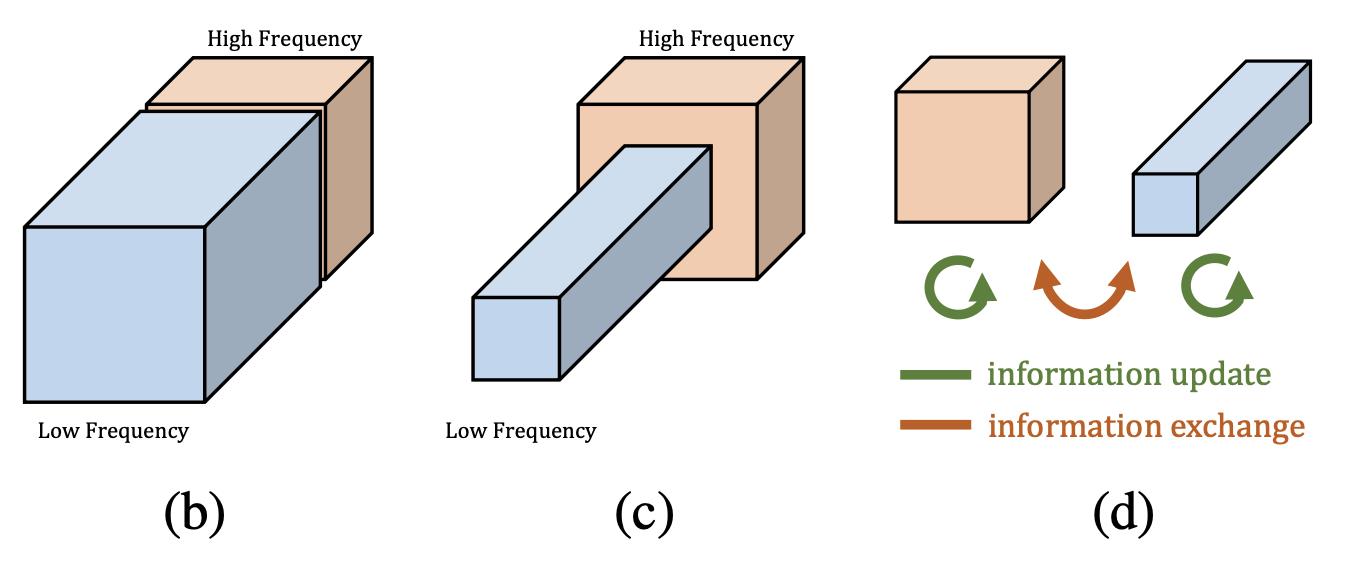
在论文中,作者提出较高的频率通常用精细的细节编码,较低的频率通常用全局结构编码。所以作者认为那么既然图像分为高低频,那么卷积产生的特征图自然也存在高低频之分。在图像处理中,模型通过高频特征图去学习图像包含的信息,因为它包含了轮廓、边缘等的信息,有助于进行显著性检测。相反,低频特征图包含的信息较少。如果我们用相同的处理方法来处理高频特征图和低频特征图,显然,前者的效益是远大于后者的。这就是特征图的冗余信息:包含信息较少的低频部分。所以在论文中作者提出了一种分而治之的方法,称之为Octave Feature Representation,对高频特征图与低频特征图分离开来进行处理。如下图所示,作者将低频特征图的分辨率降为1/2,这不仅有助于减少冗余数据,还有利于得到全局信息。
根据尺度空间理念,我们可以知道特征具有尺度不变性和旋转不变性。
- 尺度不变性:人类在识别一个物体时,不管这个物体或远或近,都能对它进行正确的辨认,这就是所谓的尺度不变性。
- 旋转不变性:当这个物体发生旋转时,我们照样可以正确地辨认它,这就是所谓的旋转不变性。
当用一个机器视觉系统分析未知场景时,计算机没有办法预先知识图像中物体尺度,因此,我们需要同时考虑图像在多尺度下的描述,获知感兴趣物体的最佳尺度。例如,高分辨率的图是人近距离的观察得到的,低分辨率的图是远距离观察得到的。
2、复现详情
2.1 Oct-Conv复现
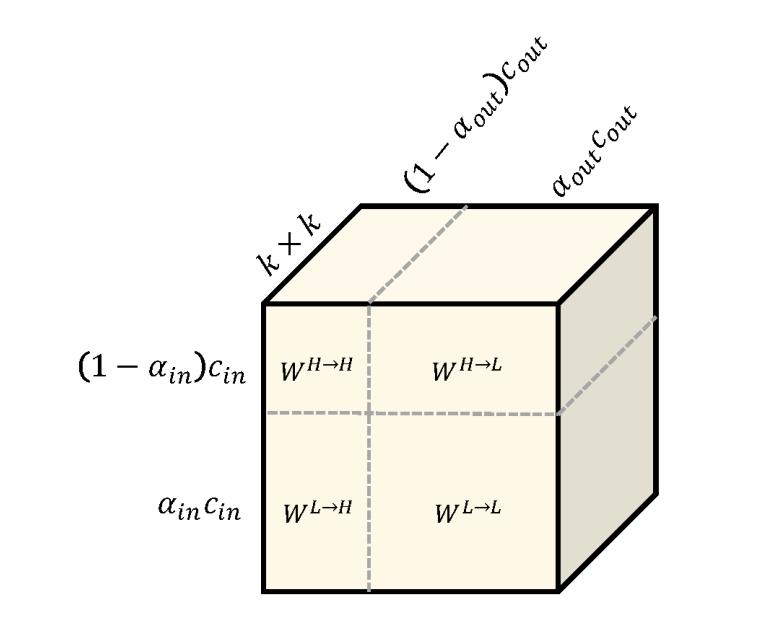
为了同时做到同一频率内的更新和不同频率之间的交流,卷积核分成四部分:
- 高频到高频的卷积核
- 高频到低频的卷积核
- 低频到高频的卷积核
- 低频到低频的卷积核
下图直观地展示了八度卷积的卷积核,可以看出四个部分共同组成了大小为 k*k 的卷积核。其中,in和out分别表示输入和输出特征图的相关属性,在这篇文章中,输入的低频占比、通道数量都和输出的一致。
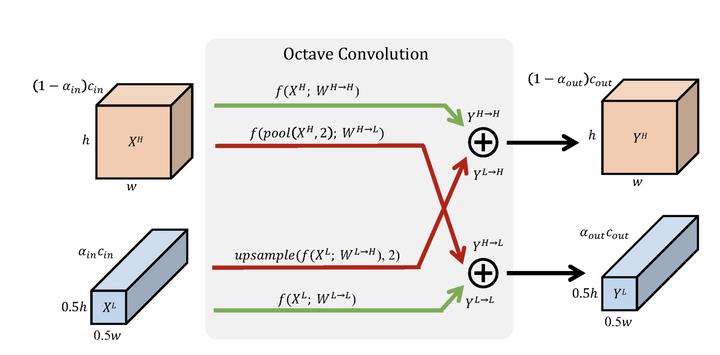
在了解了卷积核之后,下面介绍输入如何进行八度卷积操作得到输出结果。如下图所示,低频和高频的输入经过八度卷积操作得到了低频和高频的输出。红色表示高频,蓝色表示低频。绿色的箭头表示同一频率内的更新,红色的箭头表示不同频率之间的交流。
H和W分别表示特征图的长宽,可以看出低频特征图的长宽都是高频特征图的一半。因为分辨率不同,所以不同频率之间交流之前需要进行分辨率的调整:高频到低频需要进行池化(降采样)操作;低频到高频需要进行上采样操作。
import paddle import paddle.nn as nn import math class OctaveConv(nn.Layer): def __init__(self, in_channels, out_channels, kernel_size, alpha_in=0.5, alpha_out=0.5, stride=1, padding=0, dilation=1, groups=1, bias=False): super(OctaveConv, self).__init__() self.downsample = nn.AvgPool2D(kernel_size=(2, 2), stride=2) self.upsample = nn.Upsample(scale_factor=2, mode=\'nearest\') assert stride == 1 or stride == 2, "Stride should be 1 or 2." self.stride = stride self.is_dw = groups == in_channels assert 0 <= alpha_in <= 1 and 0 <= alpha_out <= 1, "Alphas should be in the interval from 0 to 1." self.alpha_in, self.alpha_out = alpha_in, alpha_out self.conv_l2l = None if alpha_in == 0 or alpha_out == 0 else \\ nn.Conv2D(int(alpha_in * in_channels), int(alpha_out * out_channels), kernel_size, 1, padding, dilation, math.ceil(alpha_in * groups)) self.conv_l2h = None if alpha_in == 0 or alpha_out == 1 or self.is_dw else \\ nn.Conv2D(int(alpha_in * in_channels), out_channels - int(alpha_out * out_channels), kernel_size, 1, padding, dilation, groups) self.conv_h2l = None if alpha_in == 1 or alpha_out == 0 or self.is_dw else \\ nn.Conv2D(in_channels - int(alpha_in * in_channels), int(alpha_out * out_channels), kernel_size, 1, padding, dilation, groups) self.conv_h2h = None if alpha_in == 1 or alpha_out == 1 else \\ nn.Conv2D(in_channels - int(alpha_in * in_channels), out_channels - int(alpha_out * out_channels), kernel_size, 1, padding, dilation, math.ceil(groups - alpha_in * groups)) def forward(self, x): x_h, x_l = x if type(x) is tuple else (x, None) x_h = self.downsample(x_h) if self.stride == 2 else x_h x_h2h = self.conv_h2h(x_h) x_h2l = self.conv_h2l(self.downsample(x_h)) if self.alpha_out > 0 and not self.is_dw else None if x_l is not None: x_l2l = self.downsample(x_l) if self.stride == 2 else x_l x_l2l = self.conv_l2l(x_l2l) if self.alpha_out > 0 else None if self.is_dw: return x_h2h, x_l2l else: x_l2h = self.conv_l2h(x_l) x_l2h = self.upsample(x_l2h) if self.stride == 1 else x_l2h x_h = x_l2h + x_h2h x_l = x_h2l + x_l2l if x_h2l is not None and x_l2l is not None else None return x_h, x_l else: return x_h2h, x_h2l class Conv_BN(nn.Layer): def __init__(self, in_channels, out_channels, kernel_size, alpha_in=0.5, alpha_out=0.5, stride=1, padding=0, dilation=1, groups=1, bias=False, norm_layer=nn.BatchNorm2D): super(Conv_BN, self).__init__() self.conv = OctaveConv(in_channels, out_channels, kernel_size, alpha_in, alpha_out, stride, padding, dilation, groups, bias) self.bn_h = None if alpha_out == 1 else norm_layer(int(out_channels * (1 - alpha_out))) self.bn_l = None if alpha_out == 0 else norm_layer(int(out_channels * alpha_out)) def forward(self, x): x_h, x_l = self.conv(x) x_h = self.bn_h(x_h) x_l = self.bn_l(x_l) if x_l is not None else None return x_h, x_l class Conv_BN_ACT(nn.Layer): def __init__(self, in_channels=3, out_channels=32, kernel_size=3, alpha_in=0.5, alpha_out=0.5, stride=1, padding=0, dilation=1, groups=1, bias=False, norm_layer=nn.BatchNorm2D, activation_layer=nn.ReLU): super(Conv_BN_ACT, self).__init__() self.conv = OctaveConv(in_channels, out_channels, kernel_size, alpha_in, alpha_out, stride, padding, dilation, groups, bias) self.bn_h = None if alpha_out == 1 else norm_layer(int(out_channels * (1 - alpha_out))) self.bn_l = None if alpha_out == 0 else norm_layer(int(out_channels * alpha_out)) self.act = activation_layer() def forward(self, x): x_h, x_l = self.conv(x) x_h = self.act(self.bn_h(x_h)) x_l = self.act(self.bn_l(x_l)) if x_l is not None else None return x_h, x_l
2.2 Oct-Mobilnetv1复现
Oct-Mobilnetv1的复现即将Mobilnetv1中的原始的Conv2D替换为Oct-Conv,其他均保持不变,在后面打印了Oct-Mobilnetv1的网络结构以及参数量,方便大家查看。
# Oct-Mobilnetv1 import paddle.nn as nn __all__ = [\'oct_mobilenet\'] def conv_bn(inp, oup, stride): return nn.Sequential( nn.Conv2D(inp, oup, 3, stride, 1), nn.BatchNorm2D(oup), nn.ReLU() ) def conv_dw(inp, oup, stride, alpha_in=0.5, alpha_out=0.5): return nn.Sequential( Conv_BN_ACT(inp, inp, kernel_size=3, stride=stride, padding=1, groups=inp, \\ alpha_in=alpha_in, alpha_out=alpha_in if alpha_out != alpha_in else alpha_out), Conv_BN_ACT(inp, oup, kernel_size=1, alpha_in=alpha_in, alpha_out=alpha_out) ) class OctMobileNet(nn.Layer): def __init__(self, num_classes=1000): super(OctMobileNet, self).__init__() self.features = nn.Sequential( conv_bn( 3, 32, 2), conv_dw( 32, 64, 1, 0, 0.5), conv_dw( 64, 128, 2), conv_dw(128, 128, 1), conv_dw(128, 256, 2), conv_dw(256, 256, 1), conv_dw(256, 512, 2), conv_dw(512, 512, 1), conv_dw(512, 512, 1), conv_dw(512, 512, 1), conv_dw(512, 512, 1), conv_dw(512, 512, 1, 0.5, 0), conv_dw(512, 1024, 2, 0, 0), conv_dw(1024, 1024, 1, 0, 0), ) self.avgpool = nn.AdaptiveAvgPool2D((1, 1)) self.fc = nn.Linear(1024, num_classes) def forward(self, x): x_h, x_l = self.features(x) x = self.avgpool(x_h) x = x.reshape([-1, 1024]) x = self.fc(x) return x def oct_mobilenet(**kwargs): """ Constructs a Octave MobileNet V1 model """ return OctMobileNet(**kwargs)
2.3 OctResNet的复现
Oct-ResNet的复现即将ResNet中的原始的Conv2D替换为Oct-Conv,其他均保持不变,在后面打印了Oct-ResNet的网络结构以及参数量,方便大家查看。
import paddle.nn as nn __all__ = [\'OctResNet\', \'oct_resnet50\', \'oct_resnet101\', \'oct_resnet152\', \'oct_resnet200\'] class Bottleneck(nn.Layer): expansion = 4 def __init__(self, inplanes, planes, stride=1, downsample=None, groups=1, base_width=64, alpha_in=0.5, alpha_out=0.5, norm_layer=None, output=False): super(Bottleneck, self).__init__() if norm_layer is None: norm_layer = nn.BatchNorm2D width = int(planes * (base_width / 64.)) * groups # Both self.conv2 and self.downsample layers downsample the input when stride != 1 self.conv1 = Conv_BN_ACT(inplanes, width, kernel_size=1, alpha_in=alpha_in, alpha_out=alpha_out, norm_layer=norm_layer) self.conv2 = Conv_BN_ACT(width, width, kernel_size=3, stride=stride, padding=1, groups=groups, norm_layer=norm_layer, alpha_in=0 if output else 0.5, alpha_out=0 if output else 0.5) self.conv3 = Conv_BN(width, planes * self.expansion, kernel_size=1, norm_layer=norm_layer, alpha_in=0 if output else 0.5, alpha_out=0 if output else 0.5) self.relu = nn.ReLU() self.downsample = downsample self.stride = stride def forward(self, x): identity_h = x[0] if type(x) is tuple else x identity_l = x[1] if type(x) is tuple else None x_h, x_l = self.conv1(x) x_h, x_l = self.conv2((x_h, x_l)) x_h, x_l = self.conv3((x_h, x_l)) if self.downsample is not None: identity_h, identity_l = self.downsample(x) x_h += identity_h x_l = x_l + identity_l if identity_l is not None else None x_h = self.relu(x_h) x_l = self.relu(x_l) if x_l is not None else None return x_h, x_l class OctResNet(nn.Layer): def __init__(self, block, layers, num_classes=1000, zero_init_residual=False, groups=1, width_per_group=64, norm_layer=None): super(OctResNet, self).__init__() if norm_layer is None: norm_layer = nn.BatchNorm2D self.inplanes = 64 self.groups = groups self.base_width = width_per_group self.conv1 = nn.Conv2D(3, self.inplanes, kernel_size=7, stride=2, padding=3, ) self.bn1 = norm_layer(self.inplanes) self.relu = nn.ReLU() self.maxpool = nn.MaxPool2D(kernel_size=3, stride=2, padding=1) self.layer1 = self._make_layer(block, 64, layers[0], norm_layer=norm_layer, alpha_in=0) self.layer2 = self._make_layer(block, 128, layers[1], stride=2, norm_layer=norm_layer) self.layer3 = self._make_layer(block, 256, layers[2], stride=2, norm_layer=norm_layer) self.layer4 = self._make_layer(block, 512, layers[3], stride=2, norm_layer=norm_layer, alpha_out=0, output=True) self.avgpool = nn.AdaptiveAvgPool2D((1, 1)) self.fc = nn.Linear(512 * block.expansion, num_classes) def _make_layer(self, block, planes, blocks, stride=1, alpha_in=0.5, alpha_out=0.5, norm_layer=None, output=False): if norm_layer is None: norm_layer = nn.BatchNorm2D downsample = None if stride != 1 or self.inplanes != planes * block.expansion: downsample = nn.Sequential( Conv_BN(self.inplanes, planes * block.expansion, kernel_size=1, stride=stride, alpha_in=alpha_in, alpha_out=alpha_out) ) layers = [] layers.append(block(self.inplanes, planes, stride, downsample, self.groups, self.base_width, alpha_in, alpha_out, norm_layer, output)) self.inplanes = planes * block.expansion for _ in range(1, blocks): layers.append(block(self.inplanes, planes, groups=self.groups, base_width=self.base_width, norm_layer=norm_layer, alpha_in=0 if output else 0.5, alpha_out=0 if output else 0.5, output=output)) return nn.Sequential(*layers) def forward(self, x): x = self.conv1(x) x = self.bn1(x) x = self.relu(x) x = self.maxpool(x) x_h, x_l = self.layer1(x) x_h, x_l = self.layer2((x_h,x_l)) x_h, x_l = self.layer3((x_h,x_l)) x_h, x_l = self.layer4((x_h,x_l)) x = self.avgpool(x_h) x = x.reshape([x.shape[0], -1]) x = self.fc(x) return x def oct_resnet50(pretrained=False, **kwargs): """Constructs a Octave ResNet-50 model. Args: pretrained (bool): If True, returns a model pre-trained on ImageNet """ model = OctResNet(Bottleneck, [3, 4, 6, 3], **kwargs) return model def oct_resnet101(pretrained=False, **kwargs): """Constructs a Octave ResNet-101 model. Args: pretrained (bool): If True, returns a model pre-trained on ImageNet """ model = OctResNet(Bottleneck, [3, 4, 23, 3], **kwargs) return model def oct_resnet152(pretrained=False, **kwargs): """Constructs a Octave ResNet-152 model. Args: pretrained (bool): If True, returns a model pre-trained on ImageNet """ model = OctResNet(Bottleneck, [3, 8, 36, 3], **kwargs) return model def oct_resnet200(pretrained=False, **kwargs): """Constructs a Octave ResNet-200 model. Args: pretrained (bool): If True, returns a model pre-trained on ImageNet """ model = OctResNet(Bottleneck, [3, 24, 36, 3], **kwargs) return model
3、对比实验
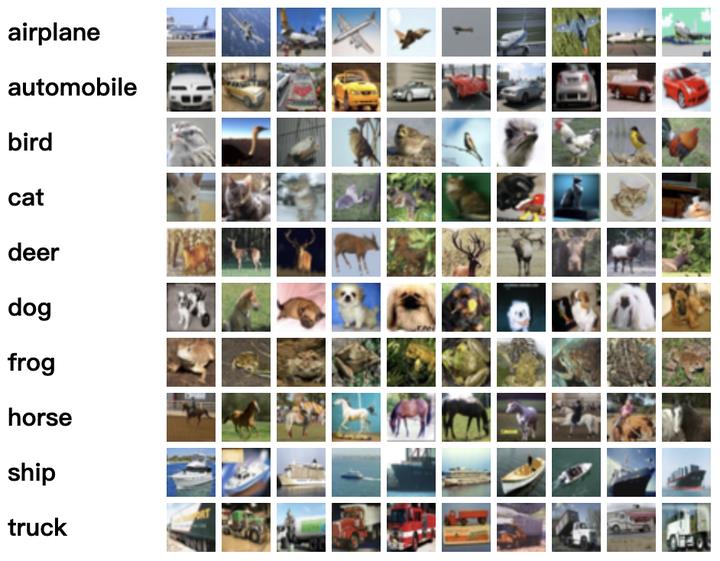
实验数据:Cifar10
CIFAR-10 是由 Hinton 的学生 Alex Krizhevsky 和 Ilya Sutskever 整理的一个用于识别普适物体的小型数据集。一共包含 10 个类别的 RGB 彩色图 片:飞机( a叩lane )、汽车( automobile )、鸟类( bird )、猫( cat )、鹿( deer )、狗( dog )、蛙类( frog )、马( horse )、船( ship )和卡车( truck )。图片的尺寸为 32×32 ,数据集中一共有 50000 张训练圄片和 10000 张测试图片。 CIFAR-10 的图片样例如图所示。
3.1 Oct_MobilNetv1模型网络结构可视化
Octmobilnet_model = oct_mobilenet(num_classes=10) # inputs = paddle.randn((1, 2, 224, 224)) # print(model(inputs)) paddle.summary(Octmobilnet_model,(16,3,224,224))
3.2 Oct_MobilNetV1模型训练
import paddle from paddle.metric import Accuracy from paddle.vision.transforms import Compose, Normalize, Resize, Transpose, ToTensor callback = paddle.callbacks.VisualDL(log_dir=\'visualdl_log_dir_octmobilenet\') normalize = Normalize(mean=[0.5, 0.5, 0.5], std=[0.5, 0.5, 0.5], data_format=\'HWC\') transform = Compose([ToTensor(), Normalize(), Resize(size=(224,224))]) cifar10_train = paddle.vision.datasets.Cifar10(mode=\'train\', transform=transform) cifar10_test = paddle.vision.datasets.Cifar10(mode=\'test\', transform=transform) # 构建训练集数据加载器 train_loader = paddle.io.DataLoader(cifar10_train, batch_size=768, shuffle=True, drop_last=True) # 构建测试集数据加载器 test_loader = paddle.io.DataLoader(cifar10_test, batch_size=768, shuffle=True, drop_last=True) Octmobilnet_model = paddle.Model(oct_mobilenet(num_classes=10)) optim = paddle.optimizer.Adam(learning_rate=0.001, parameters=Octmobilnet_model.parameters()) Octmobilnet_model.prepare( optim, paddle.nn.CrossEntropyLoss(), Accuracy() ) Octmobilnet_model.fit(train_data=train_loader, eval_data=test_loader, epochs=12, callbacks=callback, verbose=1 )
3.3 MobileNetV1模型网络结构可视化
from paddle.vision.models import MobileNetV1 mobile_model = MobileNetV1(num_classes=10) # inputs = paddle.randn((1, 2, 224, 224)) # print(model(inputs)) paddle.summary(mobile_model,(16,3,224,224))
3.4 MobileNetV1模型训练
import paddle from paddle.metric import Accuracy from paddle.vision.transforms import Compose, Normalize, Resize, Transpose, ToTensor callback = paddle.callbacks.VisualDL(log_dir=\'visualdl_log_dir_mobilenet\') normalize = Normalize(mean=[0.5, 0.5, 0.5], std=[0.5, 0.5, 0.5], data_format=\'HWC\') transform = Compose([ToTensor(), Normalize(), Resize(size=(224,224))]) cifar10_train = paddle.vision.datasets.Cifar10(mode=\'train\', transform=transform) cifar10_test = paddle.vision.datasets.Cifar10(mode=\'test\', transform=transform) # 构建训练集数据加载器 train_loader = paddle.io.DataLoader(cifar10_train, batch_size=768, shuffle=True, drop_last=True) # 构建测试集数据加载器 test_loader = paddle.io.DataLoader(cifar10_test, batch_size=768, shuffle=True, drop_last=True) mobile_model = paddle.Model(MobileNetV1(num_classes=10)) optim = paddle.optimizer.Adam(learning_rate=0.001, parameters=mobile_model.parameters()) mobile_model.prepare( optim, paddle.nn.CrossEntropyLoss(), Accuracy() ) mobile_model.fit(train_data=train_loader, eval_data=test_loader, epochs=12, callbacks=callback, verbose=1 )
3.5 Oct_ResNet50模型网络结构可视化
octresnet50_model = oct_resnet50(num_classes=10) paddle.summary(octresnet50_model,(16,3,224,224))
3.6 Oct_ResNet50模型训练
import paddle from paddle.metric import Accuracy from paddle.vision.transforms import Compose, Normalize, Resize, Transpose, ToTensor callback = paddle.callbacks.VisualDL(log_dir=\'visualdl_log_dir_octresnet\') normalize = Normalize(mean=[0.5, 0.5, 0.5], std=[0.5, 0.5, 0.5], data_format=\'HWC\') transform = Compose([ToTensor(), Normalize(), Resize(size=(224,224))]) cifar10_train = paddle.vision.datasets.Cifar10(mode=\'train\', transform=transform) cifar10_test = paddle.vision.datasets.Cifar10(mode=\'test\', transform=transform) # 构建训练集数据加载器 train_loader = paddle.io.DataLoader(cifar10_train, batch_size=256, shuffle=True, drop_last=True) # 构建测试集数据加载器 test_loader = paddle.io.DataLoader(cifar10_test, batch_size=256, shuffle=True, drop_last=True) oct_resnet50 = paddle.Model(oct_resnet50(num_classes=10)) optim = paddle.optimizer.Adam(learning_rate=0.001, parameters=oct_resnet50.parameters()) oct_resnet50.prepare( optim, paddle.nn.CrossEntropyLoss(), Accuracy() ) oct_resnet50.fit(train_data=train_loader, eval_data=test_loader, epochs=12, callbacks=callback, verbose=1 )
3.7 ResNet50模型网络结构可视化
import paddle # build model resmodel = resnet50(num_classes=10) paddle.summary(resmodel,(16,3,224,224))
3.8 ResNet50模型训练
import paddle from paddle.metric import Accuracy from paddle.vision.transforms import Compose, Normalize, Resize, Transpose, ToTensor from paddle.vision.models import resnet50 callback = paddle.callbacks.VisualDL(log_dir=\'visualdl_log_dir_resnet\') normalize = Normalize(mean=[0.5, 0.5, 0.5], std=[0.5, 0.5, 0.5], data_format=\'HWC\') transform = Compose([ToTensor(), Normalize(), Resize(size=(224,224))]) cifar10_train = paddle.vision.datasets.Cifar10(mode=\'train\', transform=transform) cifar10_test = paddle.vision.datasets.Cifar10(mode=\'test\', transform=transform) # 构建训练集数据加载器 train_loader = paddle.io.DataLoader(cifar10_train, batch_size=256, shuffle=True, drop_last=True) # 构建测试集数据加载器 test_loader = paddle.io.DataLoader(cifar10_test, batch_size=256, shuffle=True, drop_last=True) res_model = paddle.Model(resnet50(num_classes=10)) optim = paddle.optimizer.Adam(learning_rate=0.001, parameters=res_model.parameters()) res_model.prepare( optim, paddle.nn.CrossEntropyLoss(), Accuracy() ) res_model.fit(train_data=train_loader, eval_data=test_loader, epochs=12, callbacks=callback, verbose=1 )
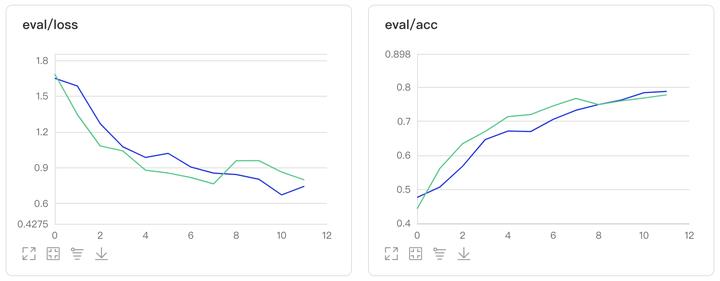
3.9 实验结果
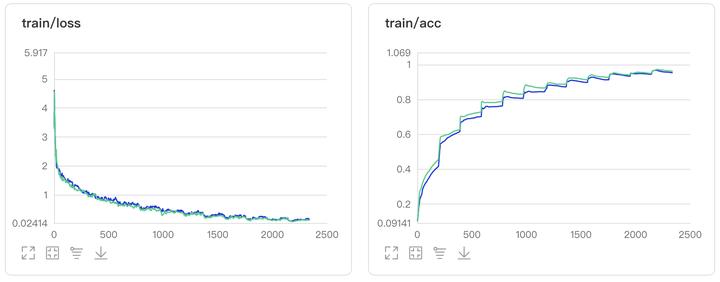
本小节提供消融实验的结果以及可视化训练结果,共计包含四个实验,分别为octmobinetv1、mobinetv1、octresnet50以及resnet50在数据集Cifar10上的结果对比。
<style> table margin: auto; </style>

图1:Oct_MobileNetV1对比实验结果图
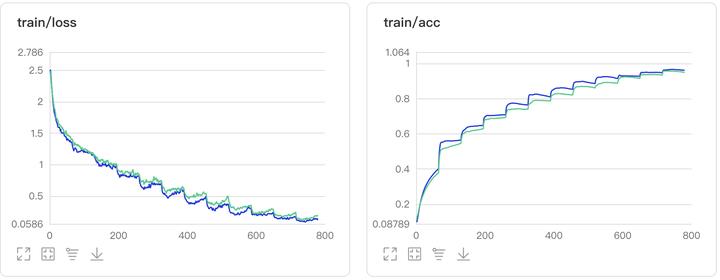
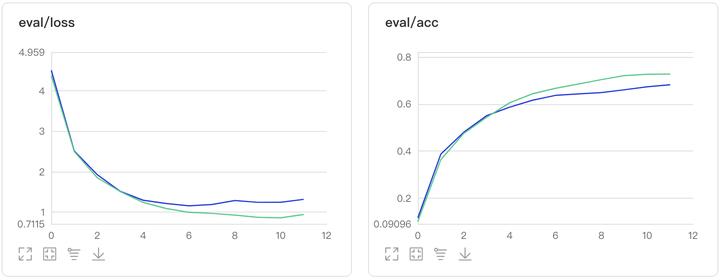

图2:Oct_ResNet50对比实验结果图
4、参考资料
Drop an Octave: Reducing Spatial Redundancy in Convolutional Neural Networks with Octave Convolution
5、总结
目前我们得到的结论与论文中的结论不符,论文提供的代码为MXnet框架,本复现参考了PyTorch版本的复现,不能确定是否为框架原因,或者一些训练设置原因,比如初始化方式或模型迭代次数不够,有待查证,大家感兴趣的也可以就这个问题与我在评论区进行交流。
ResNet
1. 前言
本文使用飞桨(PaddlePaddle)复现卷积神经网络ResNet。本文ResNet复现代码比PaddlePaddle官方内置ResNet代码结构更加清晰,建议参考本文中ResNet复现代码了解ResNet模型搭建流程。
本人全部文章请参见:博客文章导航目录
本文归属于:经典CNN复现系列
前文:GoogLeNet
2. ResNet
2013年,Lei Jimmy Ba和Rich Caurana在Do Deep Nets Really Need to be Deep?一文中分析了深度神经网络,并从理论和实践上证明了更深的卷积神经网络能够达到更高的识别准确率。
将深层网络增加的层变成恒等映射,原浅层网络层权重保持不变,则深层网络可获得与浅层网络相同的性能。即浅层网络的解空间是深层网络解空间的子集,深层网络的解空间中至少存在不差于浅层网络的解。
2015年,ResNet的作者何恺明等人首先发现随着网络叠加更多的层,训练一个相对浅层的网络,在训练集和测试集上均比深层网络表现更好,而且是在训练的各个阶段持续表现的更好,即叠加更多的层后,网络性能出现了快速下降的情况。
训练集上的性能下降,可以排除过拟合,Batch Normalization层的引入也基本解决了Plain Network的梯度消失和梯度爆炸问题。这种神经网络的“退化”现象反映出结构相似的但深度不同模型,其优化难度是不一样的,且难度的增长并不是线性的,越深的模型越难以优化。
神经网络“退化”问题有两种解决思路:一种是调整求解方法,比如更好的初始化、更好的梯度下降算法等;另一种是调整模型结构,让模型更易于优化(改变模型结构实际上是改变了Error Surface的形态)。
ResNet是2015年ImageNet比赛的冠军,其将ImageNet分类Top-5错误率降到了3.57%,这个结果甚至超出了正常人眼识别的精度。ResNet从调整模型结构方面入手,解决神经网络“退化”问题。
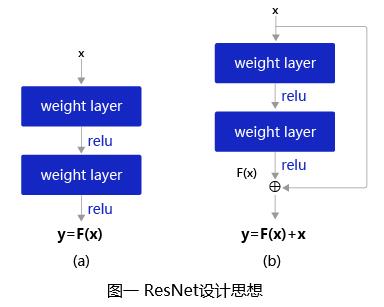
将堆叠的几层Layer称之为一个Block,对于某个Block,可以表示的函数为
F
(
x
)
F(x)
F(x),该Block期望的潜在映射为
H
(
x
)
H(x)
H(x)。ResNet提出与其让
F
(
x
)
F(x)
F(x) 如图一(a)所示直接学习潜在的映射
H
(
x
)
H(x)
H(x),不如如图一(b)所示去学习残差
H
(
x
)
−
x
H(x)−x
H(x)−x,即将
F
(
x
)
F(x)
F(x)定义为
H
(
x
)
−
x
H(x)−x
H(x)−x。这样处理可使得原本的前向路径变成
F
(
x
)
+
x
F(x)+x
F(x)+x,即用
F
(
x
)
+
x
F(x)+x
F(x)+x来拟合
H
(
x
)
H(x)
H(x)。ResNet作者何凯明等人认为这样处理可使得模型更易于优化,因为相比于将
F
(
x
)
F(x)
F(x)学习成恒等映射,让
F
(
x
)
→
0
F(x)\\rarr0
F(x)→0要更加容易。在网络进行训练时,如果经过某卷积层并不能提升性能(甚至因为网络“退化”而降低性能),那么网络就会倾向于通过更新权重参数使
F
(
x
)
F(x)
F(x)计算结果趋近于0,那么相应层的输出就近似为输入
x
x
x,也就相当于网络计算“跨过了”该层,从而通过这种跨层连接缓解网络退化现象。
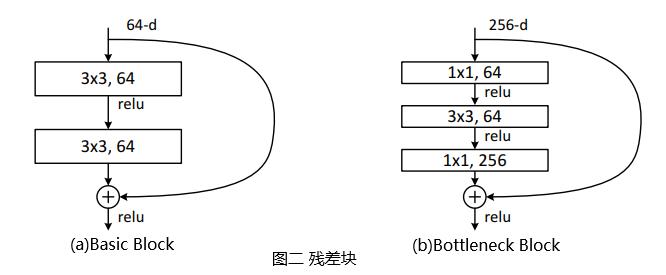
2.1 残差块(Residual Block)
残差块是残差网络(ResNet)的基础,多个相似的残差块串联构成ResNet。如图二所示,一个残差块有2条路径
F
(
x
)
F(x)
F(x)和
x
x
x,
F
(
x
)
F(x)
F(x)路径拟合残差,被称为残差路径,
x
x
x路径为恒等映射(Identity Mapping),被称为Shortcut。输入
x
x
x通过跨层连接,能更快的向前传播数据,或者向后传播梯度。
残差块共分为两种,一种如图二(b)所示包含瓶颈结构(Bottleneck),Bottleneck主要用于降低计算复杂度,输入数据先经过1x1卷积层减少通道数,再经过3x3卷积层提取特征,最后再经过1x1卷积层恢复通道数。该种结构像一个中间细两头粗的瓶颈,所以被称为Bottleneck。另一种如图二(a)所示没有Bottleneck,被称为Basic Block,Basic Block由2个3×3卷积层构成。Bottleneck Block被用于ResNet50、ResNet101和ResNet152,而Basic Block被用于ResNet18和ResNet34。
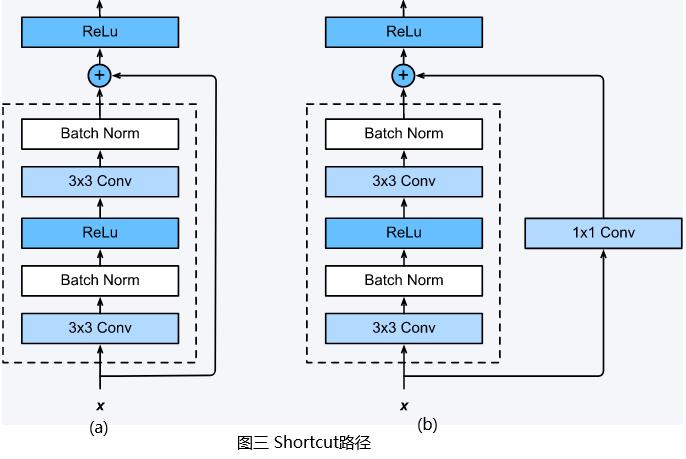
Shortcut路径也分为两种,如下图(a)所示,当残差路径输出与输入
x
x
x的通道数量和特征图尺寸均相同时,Shortcut路径将输入
x
x
x原封不动地输出。若残差路径输出与输入
x
x
x的通道数量或特征图尺寸不同时,Shortcut路径使用1x1的卷积对输入
x
x
x进行降采样,使得Shortcut路径输出与残差路径输出的通道数量和特征图尺寸均相同。
2.2 ResNet网络结构
ResNet由多个Bottleneck Block串联而成,其通过“跨层连接”的方式,使网络在无法继续通过增加层数来进一步提升性能时,跳过部分层。这样能够大大缓解深层网络“退化”现象,从而实现成百上千层的网络,大大提升了深度神经网络性能。
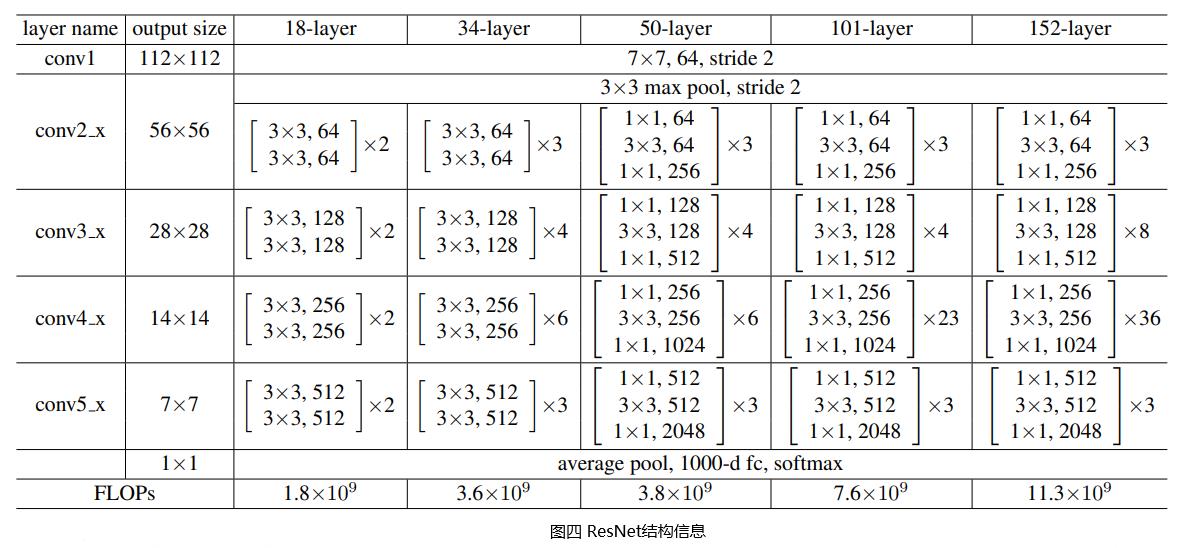
从上面的ResNet结构信息图可知,各种层数配置的ResNet网络的“头”和“尾”都是相同的。开头先用一个7×7的卷积层提取输入图片的纹理细节特征,最后接一个全局平均池化(GAP,将特征图降到1×1尺寸)和一个全连接层(对齐输出维度为分类数)。决不同层数配置ResNet的是它们各自包含的残差块的种类的数量。ResNet18和ResNet34中的残差块为Basic Block,ResNet50、ResNet101和ResNet152中的残差块为Bottleneck Block。
3. ResNet模型复现
使用飞桨(PaddlePaddle)复现ResNet,首先定义继承自paddle.nn.Layer的BasicBlock和BottleneckBlock模块,具体代码如下所示:
# -*- coding: utf-8 -*-
# @Time : 2021/8/19 19:11
# @Author : He Ruizhi
# @File : resnet.py
# @Software: PyCharm
import paddle
class BasicBlock(paddle.nn.Layer):
"""
用于resnet18和resnet34的残差块
Args:
input_channels (int): 该残差块输入的通道数
output_channels (int): 该残差块的输出通道数
stride (int): 残差块中第一个卷积层的步长,当步长为2时,输出特征图大小减半
"""
def __init__(self, input_channels, output_channels, stride):
super(BasicBlock, self).__init__()
self.input_channels = input_channels
self.output_channels = output_channels
self.stride = stride
self.conv_bn_block1 = paddle.nn.Sequential(
paddle.nn.Conv2D(in_channels=input_channels, out_channels=output_channels, kernel_size=3,
stride=stride, padding=1, bias_attr=False),
# BatchNorm2D算子对每一个batch数据中各通道分别进行归一化,因此须指定通道数
paddle.nn.BatchNorm2D(output_channels),
paddle.nn.ReLU()
)
self.conv_bn_block2 = paddle.nn.Sequential(
paddle.nn.Conv2D(in_channels=output_channels, out_channels=output_channels, kernel_size=3,
stride=1, padding=1, bias_attr=False),
paddle.nn.BatchNorm2D(output_channels)
)
# 当stride不等于1或者输入残差块的通道数和输出该残差块的通道数不想等时
# 需要对该残差块输入进行变换
if stride != 1 or input_channels != output_channels:
self.down_sample_block = paddle.nn.Sequential(
paddle.nn.Conv2D(in_channels=input_channels, out_channels=output_channels, kernel_size=1,
stride=stride, bias_attr=False),
paddle.nn.BatchNorm2D(output_channels)
)
self.relu_out = paddle.nn.ReLU()
def forward(self, inputs):
x = self.conv_bn_block1(inputs)
x = self.conv_bn_block2(x)
# 如果inputs和x的shape不一致,则调整inputs
if self.stride != 1 or self.input_channels != self.output_channels:
inputs = self.down_sample_block(inputs)
outputs = paddle.add(inputs, x)
outputs = self.relu_out(outputs)
return outputs
class BottleneckBlock(paddle.nn.Layer):
"""
用于resnet50、resnet101和resnet152的残差块
Args:
input_channels (int): 该残差块输入的通道数
output_channels (int): 该残差块的输出通道数
stride (int): 残差块中3x3卷积层的步长,当步长为2时,输出特征图大小减半
"""
def __init__(self, input_channels, output_channels, stride):
super(BottleneckBlock, self).__init__()
self.input_channels = input_channels
self.output_channels = output_channels
self.stride = stride
self.conv_bn_block1 = paddle.nn.Sequential(
paddle.nn.Conv2D(in_channels=input_channels, out_channels=output_channels // 4, kernel_size=1,
stride=1, bias_attr=False),
paddle.nn.BatchNorm2D(output_channels // 4),
paddle.nn.ReLU()
)
self.conv_bn_block2 = paddle.nn.Sequential(
paddle.nn.Conv2D(in_channels=output_channels // 4, out_channels=output_channels // 4, kernel_size=3,
stride=stride, padding=1, bias_attr=False),
paddle.nn.BatchNorm2D(output_channels // 4),
paddle.nn.ReLU()
)
self.conv_bn_block3 = paddle.nn.Sequential(
paddle.nn.Conv2D(in_channels=output_channels // 4, out_channels=output_channels, kernel_size=1,
stride=1, bias_attr=False),
paddle.nn.BatchNorm2D(output_channels)
)
# 如果【输入】和【经过三个conv_bn_block后的输出】的shape不一致
# 添加一个1x1卷积作用到输出数据上,使得【输入】和【经过三个conv_bn_block后的输出】的shape一致
if stride != 1 or input_channels != output_channels:
self.down_sample_block = paddle.nn.Sequential(
paddle.nn.Conv2D(in_channels=input_channels, out_channels=output_channels, kernel_size=1,
stride=stride, bias_attr=False),
paddle.nn.BatchNorm2D(output_channels)
)
self.relu_out = paddle.nn.ReLU()
def forward(self, inputs):
x = self.conv_bn_block1(inputs)
x = self.conv_bn_block2(x)
x = self.conv_bn_block3(x)
# 如果inputs和x的shape不一致,则调整inputs
if self.stride != 1 or self.input_channels != self.output_channels:
inputs = self.down_sample_block(inputs)
outputs = paddle.add(inputs, x)
outputs = self.relu_out(outputs)
return outputs
设置input_channels=64、output_channels=128、stride=2,实例化BasicBlock对象,并使用paddle.summary查看BasicBlock结构:
basic_block = BasicBlock(64, 128, 2)
paddle.summary(basic_block, input_size=(None, 64, 224, 224))
打印BasicBlock结构信息如下:
---------------------------------------------------------------------------
Layer (type) Input Shape Output Shape Param #
===========================================================================
Conv2D-1 [[1, 64, 224, 224]] [1, 128, 112, 112] 73,728
BatchNorm2D-1 [[1, 128, 112, 112]] [1, 128, 112, 112] 512
ReLU-1 [[1, 128, 112, 112]] [1, 128, 112, 112] 0
Conv2D-2 [[1, 128, 112, 112]] [1, 128, 112, 112] 147,456
BatchNorm2D-2 [[1, 128, 112, 112]] [1, 128, 112, 112] 512
Conv2D-3 [[1, 64, 224, 224]] [1, 128, 112, 112] 8,192
BatchNorm2D-3 [[1, 128, 112, 112]] [1, 128, 112, 112] 512
ReLU-2 [[1, 128, 112, 112]] [1, 128, 112, 112] 0
===========================================================================
Total params: 230,912
Trainable params: 229,376
Non-trainable params: 1,536
---------------------------------------------------------------------------
Input size (MB): 12.25
Forward/backward pass size (MB): 98.00
Params size (MB): 0.88
Estimated Total Size (MB): 111.13
---------------------------------------------------------------------------
设置input_channels=64、output_channels=128、stride=2,实例化BottleneckBlock对象,并使用paddle.summary查看BottleneckBlock结构:
bottleneck_block = BottleneckBlock(64, 128, 2)
paddle.summary(bottleneck_block, input_size=(None, 64, 224, 224))
打印BottleneckBlock结构信息如下:
---------------------------------------------------------------------------
Layer (type) Input Shape Output Shape Param #
===========================================================================
Conv2D-1 [[1, 64, 224, 224]] [1, 32, 224, 224] 2,048
BatchNorm2D-1 [[1, 32, 224, 224]] [1, 32, 224, 224] 128
ReLU-1 [[1, 32, 224, 224]] [1, 32, 224, 224] 0
Conv2D-2 [[1, 32, 224, 224]] [1, 32, 112, 112] 9,216
BatchNorm2D-2 [[1, 32, 112, 112]] [1, 32, 112, 112] 128
ReLU-2 [[1, 32, 112, 112]] [1, 32, 112, 112] 0
Conv2D-3 [[1, 32, 112, 112]] [1, 128, 112, 112] 4,096
BatchNorm2D-3 [[1, 128, 112, 112]] [1, 128, 112, 112] 512
Conv2D-4 [[1, 64, 224, 224]] [1, 128, 112, 112] 8,192
BatchNorm2D-4 [[1, 128, 112, 112]] [1, 128, 112, 112] 512
ReLU-3 [[1, 128, 112, 112]] [1, 128, 112, 112] 0
===========================================================================
Total params: 24,832
Trainable params: 23,552
Non-trainable params: 1,280
---------------------------------------------------------------------------
Input size (MB): 12.25
Forward/backward pass size (MB): 107.19
Params size (MB): 0.09
Estimated Total Size (MB): 119.53
---------------------------------------------------------------------------
定义继承自paddle.nn.Layer的ResNet类,在__init__方法中定义各模块,在forward函数中实现网络前向计算流程。具体代码如下:
class ResNet(paddle.nn.Layer):
"""
搭建ResNet
Args:
layers (int): 表明构建的ResNet层数,支持[18, 34, 50, 101, 152]
num_classes (int): 输出类别数
"""
def __init__(self, layers, num_classes=1000):
super(ResNet, self).__init__()
supported_layers = [18, 34, 50, 101, 152]
assert layers in supported_layers, \\
'Supported layers are {}, but input layer is {}.'.format(supported_layers, layers)
# 网络所使用的【残差块种类】、每个模块包含的【残差块数量】、各模块的【输出通道数】
layers_config = {
18: {'block_type': BasicBlock, 'num_blocks': [2, 2, 2, 2], 'out_channels': [64, 128, 256, 512]},
34: {'block_type': BasicBlock, 'num_blocks': [3, 4, 6, 3], 'out_channels': [64, 128, 256, 512]},
50: {'block_type': BottleneckBlock, 'num_blocks': [3, 4, 6, 3], 'out_channels': [256, 512, 1024, 2048]},
101: {'block_type': BottleneckBlock, 'num_blocks': [3, 4, 23, 3], 'out_channels': [256, 512, 1024, 2048]},
152: {'block_type': BottleneckBlock, 'num_blocks': [3, 8, 36, 3], 'out_channels': [256, 512, 1024, 2048]}
}
# ResNet的第一个模块:7x7的步长为2的64通道卷积 + BN + 步长为2的3x3最大池化
self.conv = paddle.nn.Conv2D(in_channels=3, out_channels=64, kernel_size=7, stride=2,
padding=3, bias_attr=False)
self.bn = paddle.nn.BatchNorm2D(64)
self.relu = paddle.nn.ReLU()
self.max_pool = paddle.nn.MaxPool2D(kernel_size=3, stride=2, padding=1)
# 输入各残差块的通道数
input_channels = 64
block_list = []
for i, block_num in enumerate(layers_config[layers]['num_blocks']):
for order in range(block_num):
block_list.append(layers_config[layers]['block_type'](input_channels,
layers_config[layers]['out_channels'][i],
2 if order == 0 and i != 0 else 1))
input_channels = layers_config[layers]['out_channels'][i]
# 将所有残差块打包
self.residual_block = paddle.nn.Sequential(*block_list)
# 全局平均池化
self.avg_pool = paddle.nn.AdaptiveAvgPool2D(output_size=1)
self.flatten = paddle.nn.Flatten()
# 输出层
self.fc = paddle.nn.Linear(in_features=layers_config[layers]['out_channels'][-1], out_features=num_classes)
def forward(self, x):
x = self.conv(x)
x = self.bn(x)
x = self.relu(x)
x = self.max_pool(x)
x = self.residual_block(x)
x = self.avg_pool(x)
x = self.flatten(x)
x = self.fc(x)
return x
设置layers=50实例化ResNet50模型对象,并使用paddle.summary查看ResNet50模型结构信息:
if 以上是关于OctConv:八度卷积复现的主要内容,如果未能解决你的问题,请参考以下文章