Flink之间的组件通信
Posted 张少凯
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Flink之间的组件通信相关的知识,希望对你有一定的参考价值。
Flink内部节点之间的通信是用Akka,比如jobmanager和taskmanager之间的通信。而operator之间的数据传输是用netty。一句话总结,组件之间的传递用的akka,数据之间的网络传输用的是netty。
flink通过akka进行的分布式通信的实现,在0.9版本使用。使用akka,所有远程过程调用现在都实现为异步消息。
RPC框架是flink任务运行的基础,flink整个RPC框架都是基于akka实现,并对akka中的actorsystem、actor进行了封装和使用。
RPC,netty,akka三者之间的关系?
RPC是一个统称,全称叫做Remote Procedure Call,远程方法调用。是一个广泛的概念。是akka或者netty具体的某一种实现。
akka与actor模型
akka是一个并发、容错和可伸缩应用的框架。基本所有框架都有这几个优点。
每个actor都是一个单一的线程,它不断地从其邮箱中poll(拉取)消息,并且连续不断地处理,可以改变它自身的内部状态,
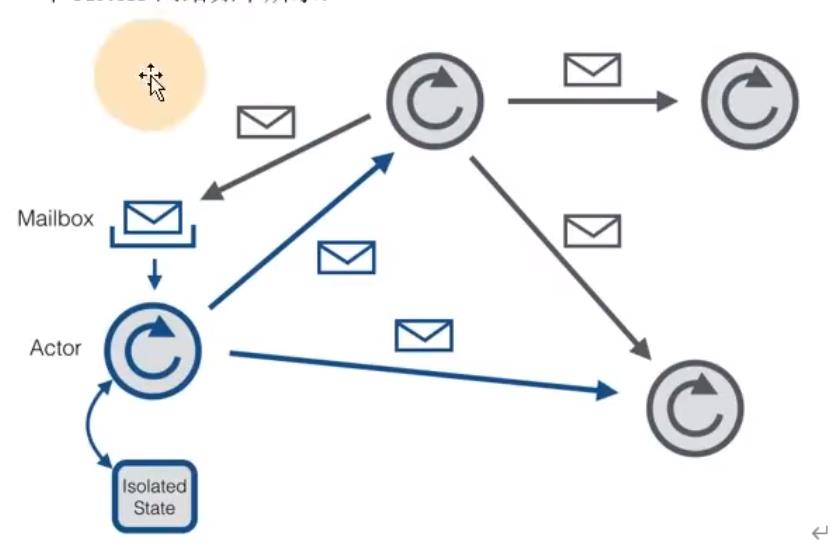
actor系统
可以理解为一个工作部门,每一个actor是一个员工,整个是一个actor系统。一个actor系统包含了所有存活的actors。
多个actor系统可以在一个机器上共存。actor系统能够自动识别消息是发送给本地机器还是远程机器的actor系统。
所有actors都是通过继承的方式来组织的。每个新创建的actor为子actor,每个父actor对自己的子actor负责监督。如果子actor出现错误,父actor将会收到通知。
flink中的actors
actor是一个包含状态和行为的容器。
flink系统由三个分布式组件构成:jobclient,jobmanager,taskmanager。
jobclient从用户处得到flink job,提交给jobmanager。jobmanager策划这个job的执行,首先分配所需的资源,分配的资源主要就是taskmanager上要执行的slot。资源分配之后,jobmanager部署单独的任务到响应的task manager上,一旦收到一个任务,task manager产生一个线程用来执行这个任务。状态的改变(如开始计算或者完成计算)将被发送回jobmanager。基于这些状态的更新,jobmanager将引导这个job的执行直到完成。一旦一个job执行完成,其结果就会被发送回jobclient。
异步VS消息同步
在任何地方,flink使用异步消息和通过futures(用来获取异步的响应)来处理响应。futures有一个超时时间,以防止操作失败。这是为了防止死锁,超市时间可以通过“akka.timeout”来配置。
两个actor在通信之前,需要获取一个actorRef,通过这个引用来和另一个actor通信。这个操作的查找也有一个超时时间,防止查询超时,通过"akka.lookup.timeout"。
akka可以限制消息的大小,可通过"akka.framesize"配置来更改大小。
使用akka
akka系统的核心是actorsystem和actor,actor不能直接创建,必须先创建actorsystem才能创建actor,另外,我们只能通过actorRef跟actor进行通信。
akka有两种核心的异步通信方式:tell和task。tell:仅仅使用异步方式给某个actor发送消息,无需等待actor响应结果,并且也不会阻塞后面代码的运行。
ask:当我们需要从actor获取响应结果时,可使用ask方法,ask方法会将返回结果包装到类scala.concurrent.Future中。然后通过异步回调获取返回结果。
上面主要介绍了akka中的actorsystem、actor,以及与actor的通信,flink借此构建其底层通信系统。
RPCGateway网关
flink的RPC协议通过RPCgateway来定义,主要定义通信行为,用于远程调用RPCendpoint方法,可以理解为对方的代理。job manager---》gateway(包含了各种行为方法,控制task manager)---》task manager。
RPCEndpoint终端
RpcEndpoint是通信终端,提供RPC服务组件的生命周期管理(start、stop)。每个RPCendpoint对应了一个路径(endpoint和actorsystem共同确定),每个路径对应一个actor,它实现了RpcGateway接口。
构造的时候调用rpcService.startServer()启动RpcServer,进入可以接收请求的状态,最后将RpcServer绑定到主线程上真正执行起来。
在RpcEndpoint中还定义了一些方法如runAsync(Runnable)、callAsync(callable,time)方法来执行Rpc调用,值得注意的是在flink的设计中,对于同一个endpoint,所有的调用都运行在主线程,因此不会有并发问题,当启动Rpcendpoint进行RPC通信时,它会委托RpcServer进行处理。
RpcService和RpcServer
RpcService和RpcServer是RPCendpoint的成员变量。
RpcService是Rpc服务的接口,其作用如下:
根据提供的RPCendpoint来启动和停止RpcServer(actor)
根据提供的地址链接到对方的RpcServer,并返回一个Rpcgateway
延迟\\立刻调度runnable、callable
在flink中的实现类为AkkaRpcService,是Akka的ActorSystem的封装,基本可以理解为ActorSystem的一个适配器。
最终使用动态代理将所有的消息转发到InvocationHandler。
RpcServer负责接收响应远端RPC消息请求,是一个自身的代理对象(终端的启动实际上是由自身网关RpcServer来启动的rpcserver.start()方法。)。有两个实现:AkkaInvocationHandler和FencedAkkaInvocationHandler。
AkkaRpcActor
AkkaRpcActor是Akka的具体实现,主要负责处理如下类型消息:
1.本地Rpc消息,调用LocalRpcInvocation
会指派给rpcEndpoint进行处理,如果有响应,则将结果返还给sender。
2.runAsync消息 && callAsync消息
这类消息带有可执行的代码,直接在actor的线程中执行。
3.控制消息controlMessages
用来控制actor行为,start启动,stop停止,停止后收到的消息会丢弃。
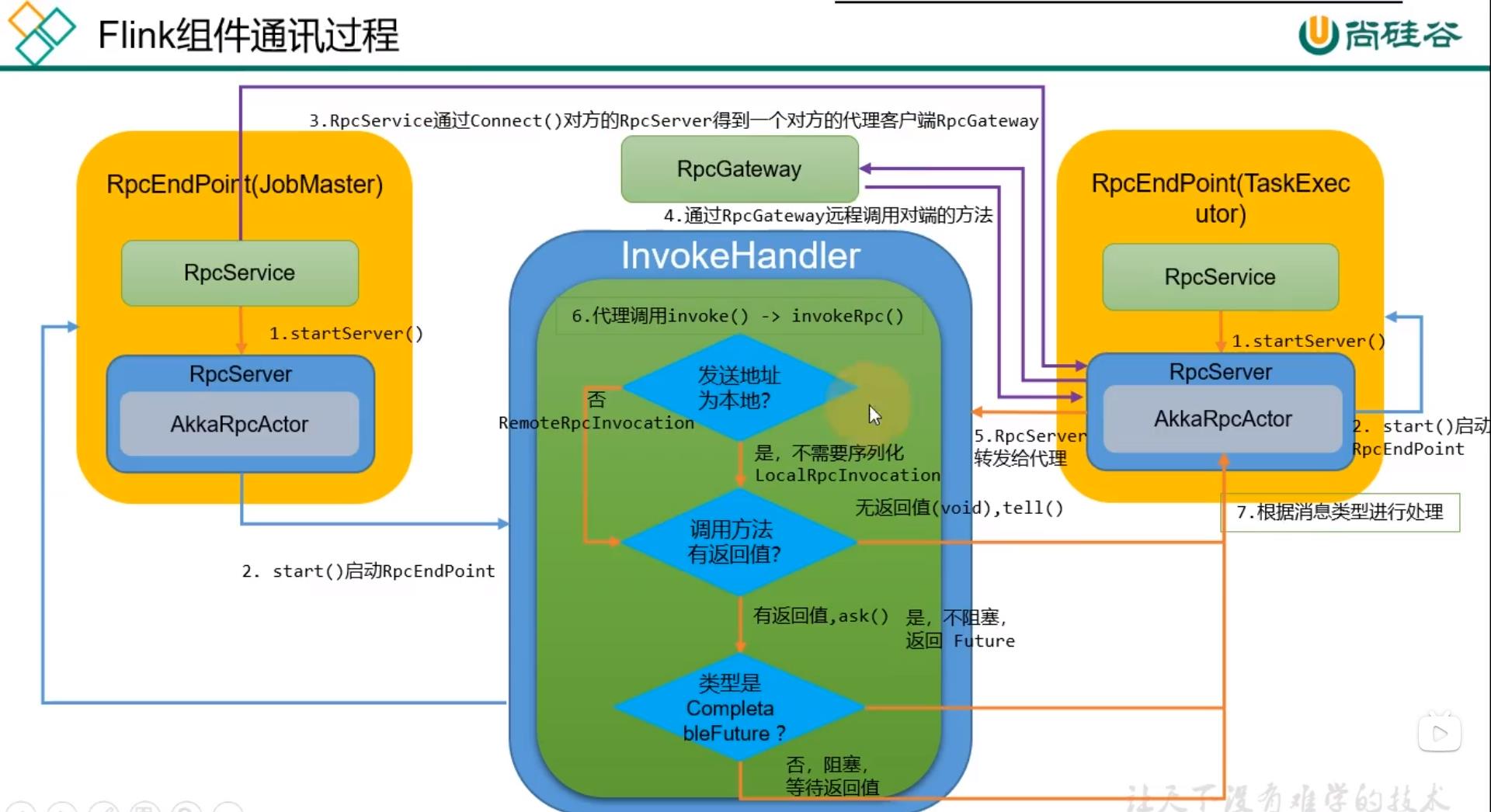
RPC交互过程
RPC通信过程分为请求和响应。
请求:在RPCservice中调用connect()方法与对端的RPCendpoint(RPCserver)建立连接,connect()方法根据返回的地址返回InvocationHandler(AkkaInvocationHandler或FencedAkkaInvocationHandler)。
响应:RPC消息通过RPCendpoint所绑定的actor的actorREF发送的,akkaRPCactor是消息的接收入口,akkaRPCactor在RPCendpoint中构造生成,负责将消息交给不同的方法进行处理。
RPC流程图
以上是关于Flink之间的组件通信的主要内容,如果未能解决你的问题,请参考以下文章