串口通信
Posted EA7_King
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了串口通信相关的知识,希望对你有一定的参考价值。
1.�ն��豸�ļ�
�� Linux ���ն˵��豸�ļ���λ��/dev/Ŀ¼�£��� tty*��ͷ���ַ���������ʹ����������鿴��
ls /dev/tty*
-
���Կ����и���Ϊ��ttymxc0�����豸����ttymxc0�����ǿ�����Ĵ��� 1�����ѱ�Ĭ�ϱ����������е��ն��ϡ�
-
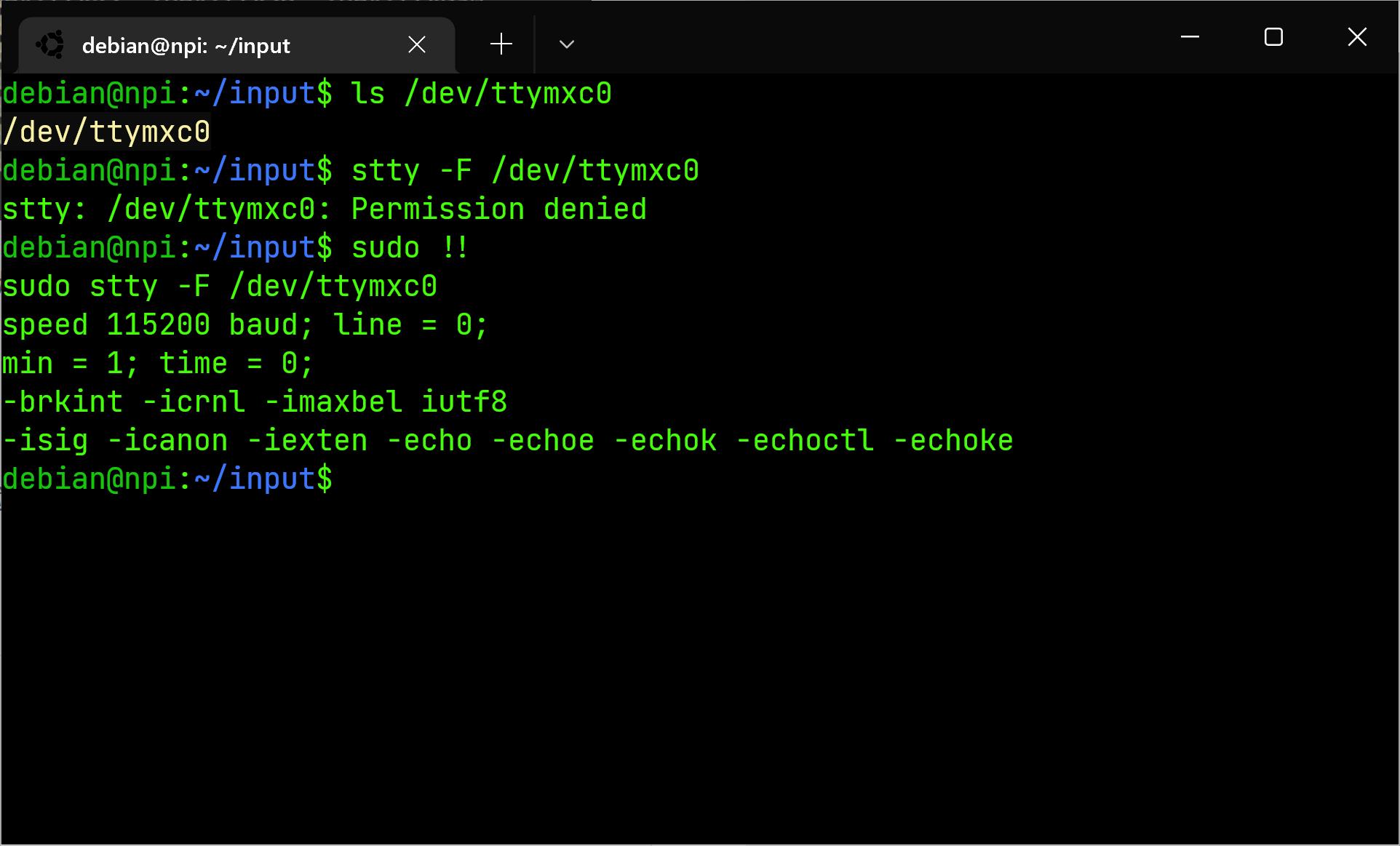
stty ����,������ʾ�������ն˵ĸ��ֲ������粨���ʡ��ַ���С����żУ�顢ֹͣλ�ȡ�
#�����ǰ�ն˲���
stty
#�鿴ttymxc0�IJ���
stty -F /dev/ttymxc0
#����ͨѶ���ʣ�����ispeedΪ�������ʣ�ospeedΪ�������
stty -F /dev/ttymxc0 ispeed 115200 ospeed 115200
2.����ͨ��
- ʹ��Type-C�ӿڵ����������ӿ������PC
- ��MobaXterm�ն�
- ���ò����ʣ����ݵ�һ����stty�����еõ���ttymxc0�IJ�����
- ����������Ѿ�����WiFi���ڿ�������ʹ��ifconfig����鿴ip��ַ
- ��Windows��Ubuntu��ʹ��ssh�������ӿ�����
ssh debian@192.168.31.xxx
����������ssh�ն���ִ��
echo "Hello" > /dev/ttymxc0
Ȼ�
ROS串口通信简析(一)——串口发送
参考技术AROS节点程序运行过程中需要获取机器人的传感器信息和发送控制指令,因此不可避免要与机器人进行通信,常见的通讯方式有串口、CAN和网口等,其中串口最为普遍。
ROS通过自带的 serial 包连接串口设备,进行串口通信,需要提前安装 serial 包:
sudo apt-get install ros-melodic-serial
串口通信根据数据传输方向可以分为 串口发送 和 串口接收 。
通过串口发送数据时,需要明确发送机制,常见的发送机制有:
定时发送是通过设定定时器,以 固定频率 发送数据包;
触发条件发送是通过条件判断语句,判断某个标志位或某个事件发生后,再发送数据包,特点是 频率不固定 。
发送数据分为两个步骤:
由此可知buffer数据结构需要可同时被这两个步骤访问,buffer需要为全局变量。
首先根据通信协议定义buffer中的帧头、帧尾等固定内容,然后接收别的Topic,获取待发送数据,把获取的数据填入到协议的数据段,最后根据数据段计算校验码。
1 订阅发送数据的Topic
serial_sub = nh.subscribe("/joy", 10, &DecodeFrame::serial_sub_callback,this);
2 根据Topic填入数据段和校验
1 创建定时回调函数
首先需要创建一个定时器,设定发送频率,并指定回调函数名称
write_rs232_timer = nh.createTimer(ros::Duration(0.01), &DecodeFrame::CB_write_rs232_Cycle, this);
2 通过 serial 将buffer数据写入串口设备
实例化串口对象,并打开串口
发送数据到串口设备上
注意1:发送数据节点挂掉
若发送数据Topic的节点挂掉后,由于buffer是全局变量,buffer的数据段会一直是上一帧的数据,不会再改变,为避免上述情况,在将数据写入串口设备后, 将数据段清零。
注意2:joystick包发送机制
在使用PS3/PS4、Xbox手柄时,使用ros-melodic-joy包获取摇杆数据,手柄的遥杆或者按键如果一直处于同一位置(初始零位和最大值)只会发送一帧数据,不会连续发送, 只有当摇杆数据变化时,才会发送数据。
因此使用 rostopic hz /joy 会显示没有msg信息传输,所以串口程序不会进回调函数获取发送数据,但是数值确实是一直保持的, 所以就不能将数据段清零。
触发条件发送与定时发送相比的最大不同之处在于发送频率不同,不需要设置定时器,在满足条件后直接将数据写入串口即可。
以上是关于串口通信的主要内容,如果未能解决你的问题,请参考以下文章