youtube点击位置纠偏论文:《Recommending What Video to Watch Next: A Multitask Ranking System》
Posted xd_xumaomao
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了youtube点击位置纠偏论文:《Recommending What Video to Watch Next: A Multitask Ranking System》相关的知识,希望对你有一定的参考价值。
背景
在推荐系统存在两个难题:
1. 需要同时优化点击、观看时长、点赞、打分、评论等多个目标,如何同时建模多个目标
2. 存在position bias,即同个视频放在不通位置上点击率等会不同,如何建模position bias
youtube这篇论文采用了MMOE来建模多目标,并用一个shallow tower来建模position bias
场景描述
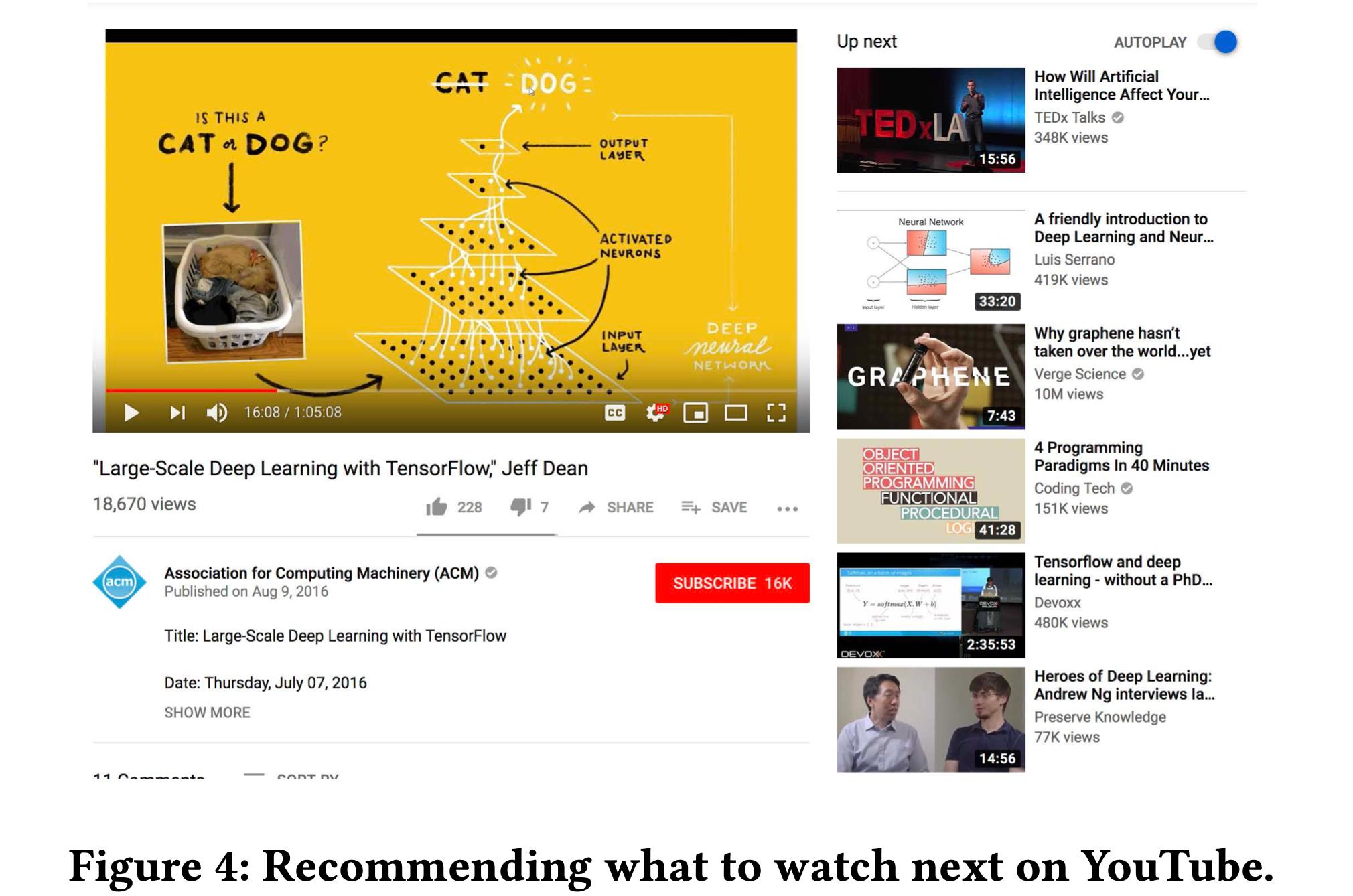
youtube主要针对的是视频推荐场景,如下图,需要处理的问题是推荐下一个感兴趣的视频。
整体推荐框架采用常见的召回(生成候选)+排序(找出最佳)
- 召回阶段,作者会用多种方法得到多样化的候选videos,如基于视频主题的方法(与当前观看视频相关topic的视频)、协同过滤(看过这个视频的其他用户一般看什么视频)等
- 排序阶段,系统需要提供一个排序的视频列表(如上图右侧所示),这篇论文介绍的就是排序阶段的模型
模型结构
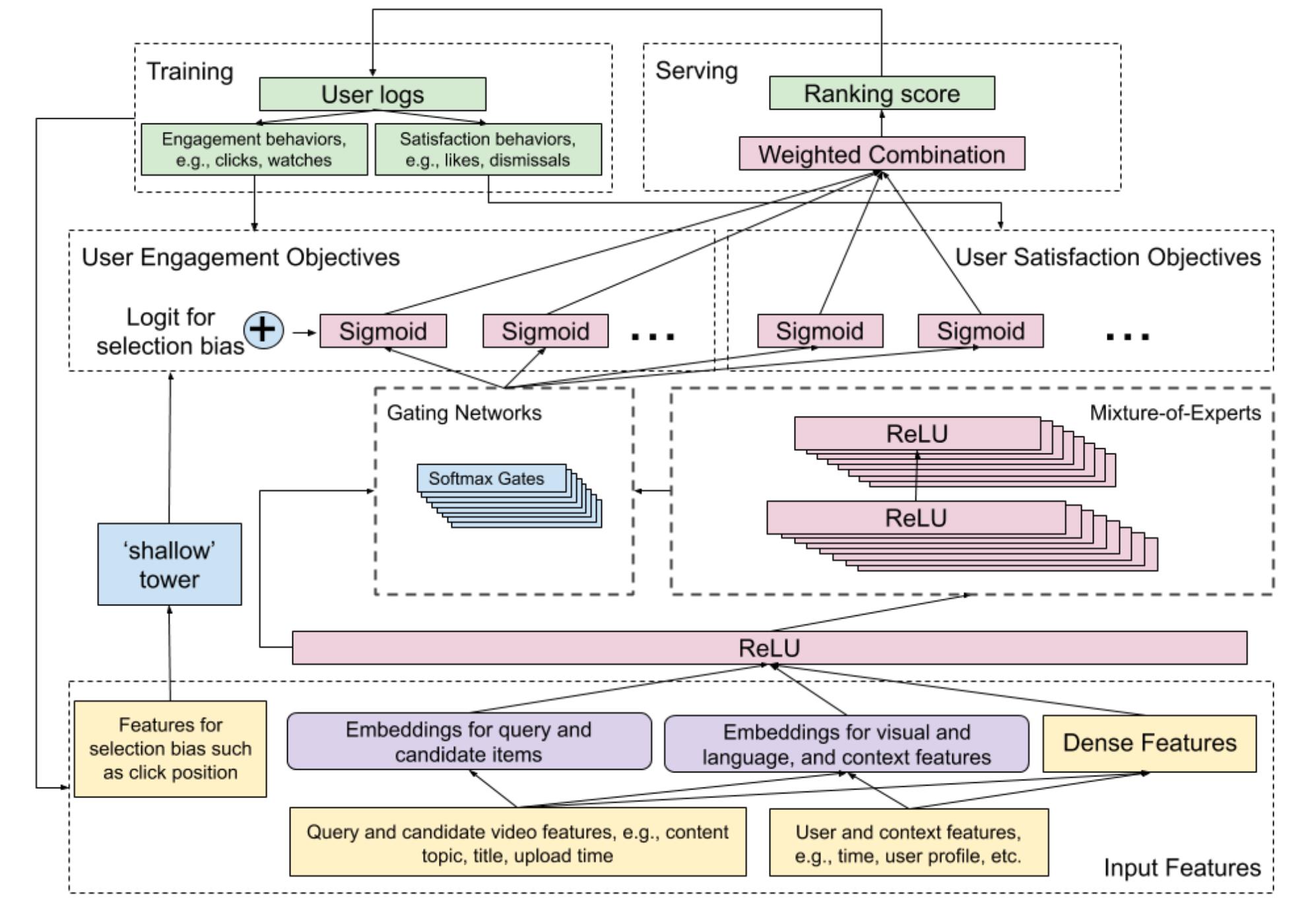
模型包含两个tower:
1. main tower:用了一个mmoe的结构来建模多个目标,但是在mmoe下面也有一个share bootom layer,这样好处主要是可以减少MMOE结构的参数量
2. shallow tower:用了一个浅层tower来建模position bias,输入的特征主要是位置、设备信息等特征
把main tower 和 shallow tower的预估值相加作为最终的预估值
实践技巧
1. shallow tower在训练时把位置特征的drop-out rate设为10,防止过度依赖位置特征,serving时位置特征设为miss,设备信息等特征会正常加入到shallow tower的输入中,因为不同设备上不同位置的bias是不同的
2. MMOE训练时可能会出现某个任务过度依赖一个expert的问题,论文中提出可以对expert叫drop-out,以一定的概率让某个expert失效
参考资料
纠偏控制系统分析
1、内容简介
略
518-可以交流、咨询、答疑
2、内容说明
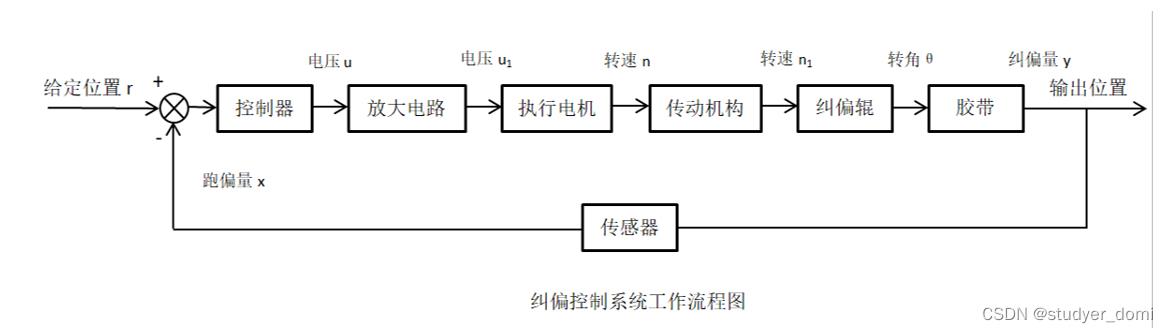
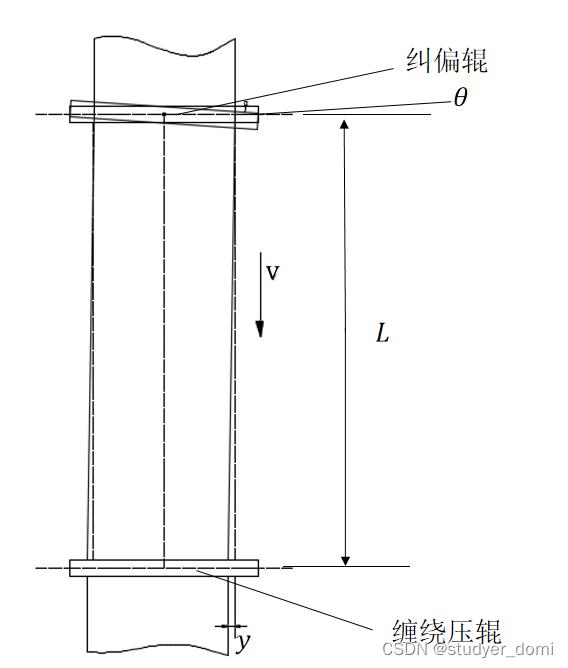
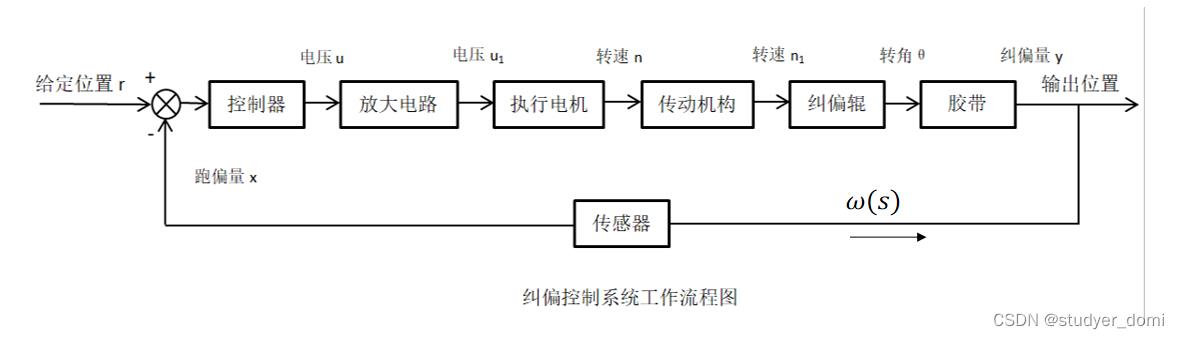
纠偏原理:利用位移传感器作为检测元件对胶带进入缠绕压辊的位置进行实时检测,并将实时位置与给定位置进行对比得到实时跑偏量x,转化为模拟电压/电流信号传递给处理器,处理器根据实时信号输出控制电压,经过驱动电路放大后驱动电机转动,电机经过传动机构带动纠偏辊旋转,从而带动胶带位置回正。
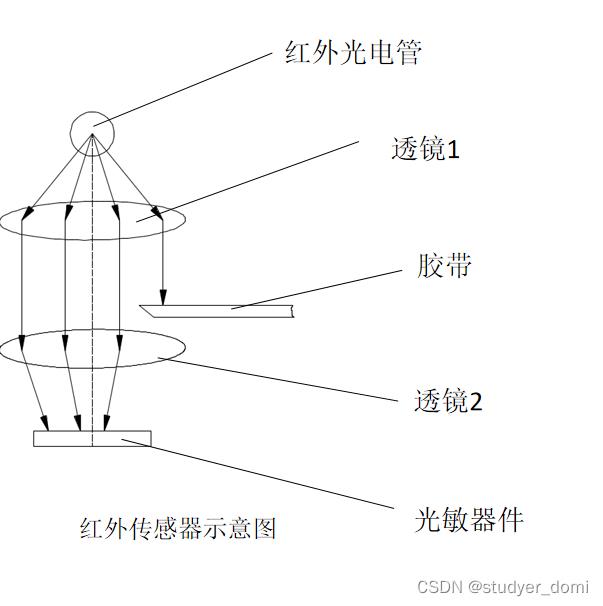
红外传感器原理:
如右图所示,红外光电管发射红外光,通过透镜滤除干扰信号并发出平行的红外光线,当橡胶胶带发生横向偏移时,就会挡住或避开一部分红外光,没挡住的红外光通过另一个透镜聚焦照射在光敏器件上,从而引起光敏元件的电学特性变化,经过信号处理电路可以将光敏器件上的变化量转化为模拟电压量进行采样分析。
执行电机选择:
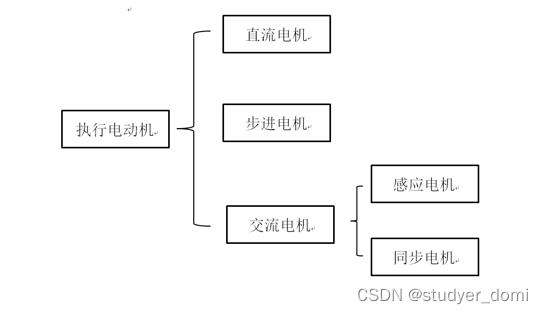
直流电机:调速性能优秀,且不会失步直流电机数字控制调压: 通过调节周期内脉冲信号的高低电平占比,即(占空比),来调整输出电压:
传动机构采用蜗轮蜗杆带动纠偏辊转动的形式,因此纠偏辊转速与电机输出转速之间的比值为蜗轮蜗杆的传动比,
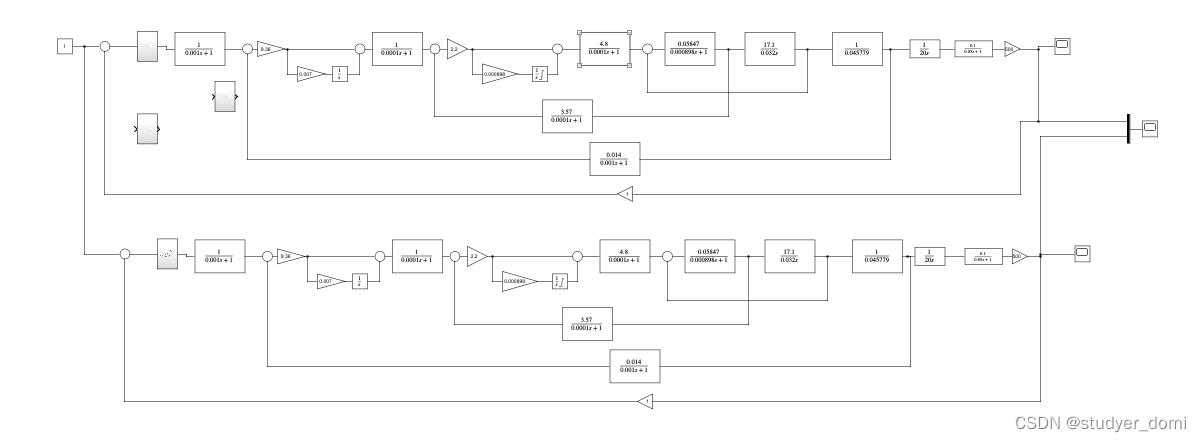
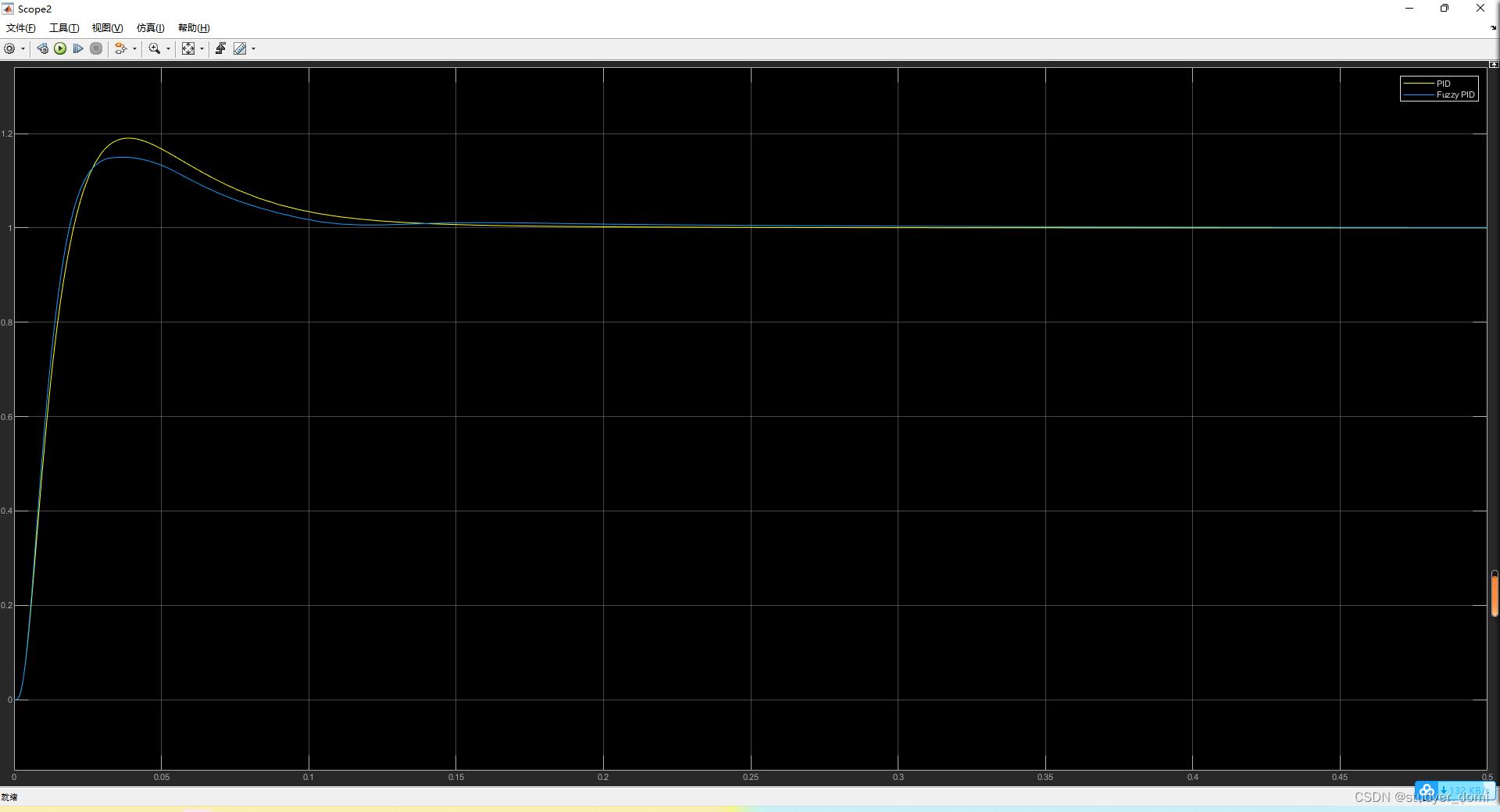
3、仿真分析
4、参考论文
略
以上是关于youtube点击位置纠偏论文:《Recommending What Video to Watch Next: A Multitask Ranking System》的主要内容,如果未能解决你的问题,请参考以下文章